TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107269
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025074503,2021071360
出願日
2025-04-28,2021-04-20
発明の名称
移動体システム、移動体制御方法、及びプログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人北斗特許事務所
主分類
G05D
1/646 20240101AFI20250710BHJP(制御;調整)
要約
【課題】目標位置に到着するまでの時間を短縮すること。
【解決手段】移動体システム1は、設定部202、及び物体検知部を備える。設定部202は、指標検知部222が誘導指標を検知した場合に、現在位置から目標位置までの移動距離が第1閾値以上であれば、本体の誘導方式を第2誘導方式に設定する。設定部202は、移動距離が第1閾値よりも短ければ、本体の誘導方式を第1誘導方式に設定する。第1誘導方式では、指標検知部222が検知した誘導指標に従って移動する。第2誘導方式では、位置検出部201の検出結果に基づいて移動する。物体検知部は、本体に対して本体が前進又は後進する第1方向に存在する物体までの、第1方向と交差する第2方向における距離を検知する。物体検知部が検知した物体までの距離が閾値以下であると、設定部202は、本体の誘導方式を第1誘導方式に設定する。
【選択図】図1
特許請求の範囲
【請求項1】
本体の移動先の目標位置を受信する通信部と、
前記本体の現在位置を検出する位置検出部と、
前記本体を誘導する誘導路に沿って設けられた誘導指標を検知する指標検知部と、
前記本体の誘導方式を、前記指標検知部が検知した前記誘導指標に従って移動する第1誘導方式、及び、前記位置検出部の検出結果に基づいて移動する第2誘導方式のいずれかに設定する設定部と、
前記設定部で設定された誘導方式で前記本体を移動させる移動制御部と、を備え、
前記設定部は、前記指標検知部が前記誘導指標を検知した場合に、前記現在位置から前記目標位置までの移動距離が第1閾値以上であれば、前記本体の誘導方式を前記第2誘導方式に設定し、前記移動距離が前記第1閾値よりも短ければ、前記本体の誘導方式を前記第1誘導方式に設定し、
前記本体に対して前記本体が前進又は後進する第1方向に存在する物体までの、前記第1方向と交差する第2方向における距離を検知する物体検知部を更に備え、
前記物体検知部が検知した前記物体までの距離が閾値以下であると、前記設定部は、前記本体の誘導方式を前記第1誘導方式に設定する、
移動体システム。
続きを表示(約 1,700 文字)
【請求項2】
前記本体が前記誘導路に従って移動中に、前記誘導路の終端位置を示す終端指標を前記指標検知部が検知した場合に、前記終端位置と、前記目標位置との間の距離が第2閾値以下であれば、前記移動制御部は、前記終端位置で前記本体を停止させる、
請求項1に記載の移動体システム。
【請求項3】
前記移動制御部は、前記終端指標を前記指標検知部が検知している状態で、前記現在位置から前記目標位置までの距離が前記第2閾値以下になると、前記本体の速度を停止速度に減速する、
請求項2に記載の移動体システム。
【請求項4】
前記本体が前記誘導路の前記終端位置に到着した場合に、前記終端位置と前記目標位置との間の距離が前記第2閾値より長い場合、前記設定部は、前記終端位置から前記目標位置まで前記本体を誘導する誘導方式を前記第2誘導方式に設定し、前記移動制御部は、前記終端位置から前記目標位置まで前記第2誘導方式で前記本体を移動させる、
請求項2又は3に記載の移動体システム。
【請求項5】
前記第1誘導方式での前記本体の最高速度は、前記第2誘導方式での前記本体の最高速度よりも遅く、
前記設定部が、前記本体の誘導方式を前記第2誘導方式から前記第1誘導方式に変更した場合、前記移動制御部は、前記本体の速度を前記第1誘導方式での最高速度以下に減速させた後に、前記第1誘導方式で前記本体を移動させる、
請求項1~4のいずれか1項に記載の移動体システム。
【請求項6】
前記移動制御部が前記第1誘導方式で前記本体を移動させている状態で、前記指標検知部が前記誘導指標を検知不能になると、前記設定部が、前記本体の誘導方式を前記第1誘導方式から前記第2誘導方式に変更する、
請求項1~5のいずれか1項に記載の移動体システム。
【請求項7】
前記物体までの距離が前記閾値以下である狭路部分を前記本体が通過すると、前記設定部は、前記本体の誘導方式を前記第1誘導方式から前記第2誘導方式に変更し、前記移動制御部が、前記第2誘導方式で前記本体を移動させる、
請求項6に記載の移動体システム。
【請求項8】
前記本体が搬送する対象物を保持する保持部と、
前記保持部が保持している前記対象物の大きさに関する対象物情報を取得する取得部と、を更に備え、
前記閾値は前記対象物情報に基づいて設定される、
請求項1~7のいずれか1項に記載の移動体システム。
【請求項9】
本体の移動先の目標位置を受信する受信ステップと、
前記本体の現在位置を検出する位置検出ステップと、
前記本体を誘導する誘導路に沿って設けられた誘導指標を検知する指標検知ステップと、
前記本体の誘導方式を、前記指標検知ステップで検知された前記誘導指標に従って移動する第1誘導方式、及び、前記位置検出ステップの検出結果に基づいて移動する第2誘導方式のいずれかに設定する設定ステップと、
前記設定ステップで設定された誘導方式で前記本体を移動させる制御ステップと、を含み、
前記設定ステップでは、前記指標検知ステップで前記誘導指標を検知した場合に、前記現在位置から前記目標位置までの移動距離が第1閾値以上であれば、前記本体の誘導方式を前記第2誘導方式に設定し、前記移動距離が前記第1閾値よりも短ければ、前記本体の誘導方式を前記第1誘導方式に設定し、
前記本体に対して前記本体が前進又は後進する第1方向に存在する物体までの、前記第1方向と交差する第2方向における距離を検知する物体検知ステップを更に含み、
前記設定ステップでは、前記物体検知ステップで検知した前記物体までの距離が閾値以下であると、前記本体の誘導方式を前記第1誘導方式に設定する、
移動体制御方法。
【請求項10】
1以上のプロセッサに、
請求項9に記載の移動体制御方法を実行させるための、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体システム、移動体制御方法、及びプログラムに関する。より詳細には、本開示は、自律的に移動する移動体システム、移動体制御方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1は、無人搬送車の走行制御方法を開示する。特許文献1の走行制御方法では、無人搬送車が目標位置に向かって自律移動を行っている間に、無人搬送車が、磁気テープからなるガイドラインを磁気センサで検出すると、ガイド走行に移行する。
【先行技術文献】
【特許文献】
【0003】
特開2002-73171号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ガイド走行では、ガイドラインを磁気センサで検出しながら走行するため、ガイド走行時の走行速度は自律移動時の走行速度よりも遅くなる。そのため、ガイドラインが配置された場所で無人走行車が必ずガイド走行を行うと、無人搬送車が目標位置に到着するまでの時間が長くなるという問題があった。
【0005】
本開示の目的は、目標位置に到着するまでの時間を短縮可能な移動体システム、移動体制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
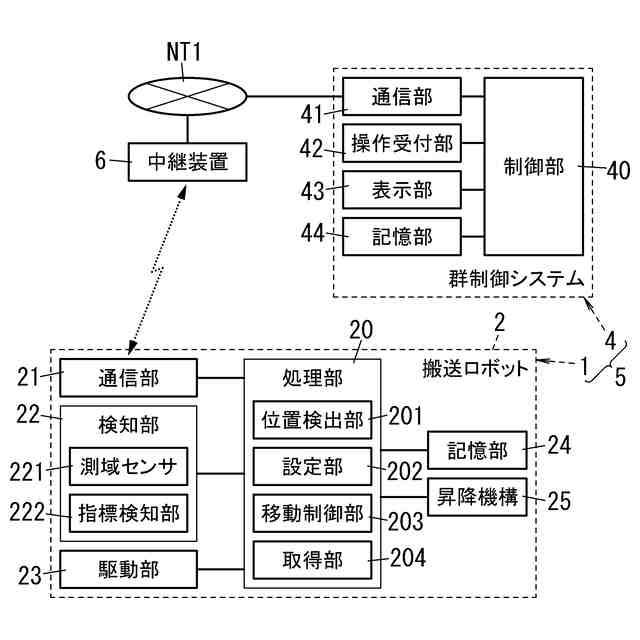
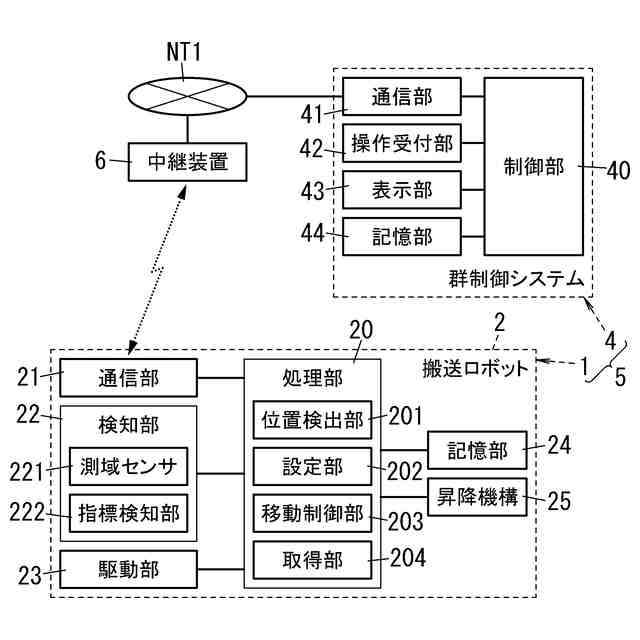
本開示の一態様の移動体システムは、通信部と、位置検出部と、指標検知部と、設定部と、移動制御部と、を備える。前記通信部は、本体の移動先の目標位置を受信する。前記位置検出部は、前記本体の現在位置を検出する。前記指標検知部は、前記本体を誘導する誘導路に沿って設けられた誘導指標を検知する。前記設定部は、前記本体の誘導方式を第1誘導方式及び第2誘導方式のいずれかに設定する。前記第1誘導方式は、前記指標検知部が検知した前記誘導指標に従って移動する誘導方式である。前記第2誘導方式は、前記位置検出部の検出結果に基づいて移動する誘導方式である。前記移動制御部は、前記設定部で設定された誘導方式で前記本体を移動させる。前記設定部は、前記指標検知部が前記誘導指標を検知した場合に、前記現在位置から前記目標位置までの移動距離が第1閾値以上であれば、前記本体の誘導方式を前記第2誘導方式に設定する。前記設定部は、前記移動距離が前記第1閾値よりも短ければ、前記本体の誘導方式を前記第1誘導方式に設定する。前記移動体システムは、前記本体に対して前記本体が前進又は後進する第1方向に存在する物体までの、前記第1方向と交差する第2方向における距離を検知する物体検知部を更に備える。前記物体検知部が検知した前記物体までの距離が閾値以下であると、前記設定部は、前記本体の誘導方式を前記第1誘導方式に設定する。
【0007】
本開示の一態様の移動体制御方法は、受信ステップと、位置検出ステップと、指標検知ステップと、設定ステップと、制御ステップと、を含む。前記受信ステップでは、本体の移動先の目標位置を受信する。前記位置検出ステップでは、前記本体の現在位置を検出する。前記指標検知ステップでは、前記本体を誘導する誘導路に沿って設けられた誘導指標を検知する。前記設定ステップでは、前記本体の誘導方式を第1誘導方式及び第2誘導方式のいずれかに設定する。前記第1誘導方式では、前記指標検知ステップで検知された前記誘導指標に従って移動する。前記第2誘導方式では、前記位置検出ステップの検出結果に基づいて移動する。前記制御ステップでは、前記設定ステップで設定された誘導方式で前記本体を移動させる。前記設定ステップでは、前記指標検知ステップで前記誘導指標を検知した場合に、前記現在位置から前記目標位置までの移動距離が第1閾値以上であれば、前記本体の誘導方式を前記第2誘導方式に設定する。前記設定ステップでは、前記移動距離が前記第1閾値よりも短ければ、前記本体の誘導方式を前記第1誘導方式に設定する。前記移動体制御方法は、前記本体に対して前記本体が前進又は後進する第1方向に存在する物体までの、前記第1方向と交差する第2方向における距離を検知する物体検知ステップを更に含む。前記設定ステップでは、前記物体検知ステップで検知した前記物体までの距離が閾値以下であると、前記本体の誘導方式を前記第1誘導方式に設定する。
【0008】
本開示の一態様のプログラムは、1以上のプロセッサに、前記移動体制御方法を実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、目標位置に到着するまでの時間を短縮することができる。
【図面の簡単な説明】
【0010】
図1は、本開示の一実施形態に係る移動体システムを備える搬送システムのシステム構成図である。
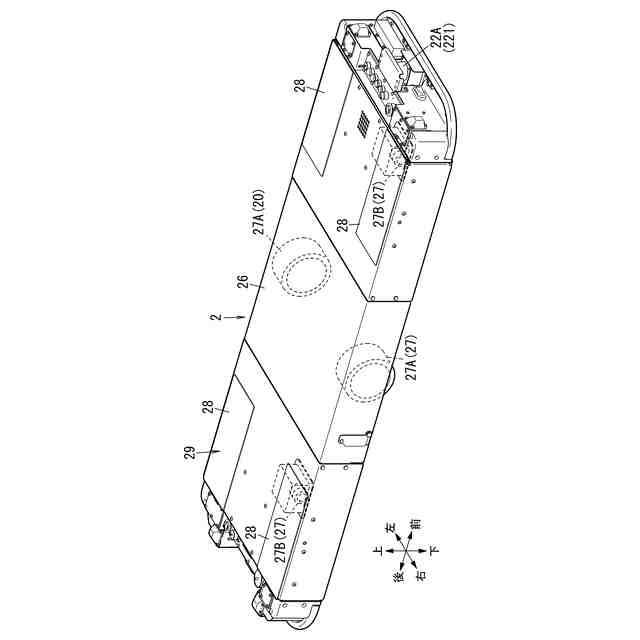
図2は、同上の移動体システムの斜視図である。
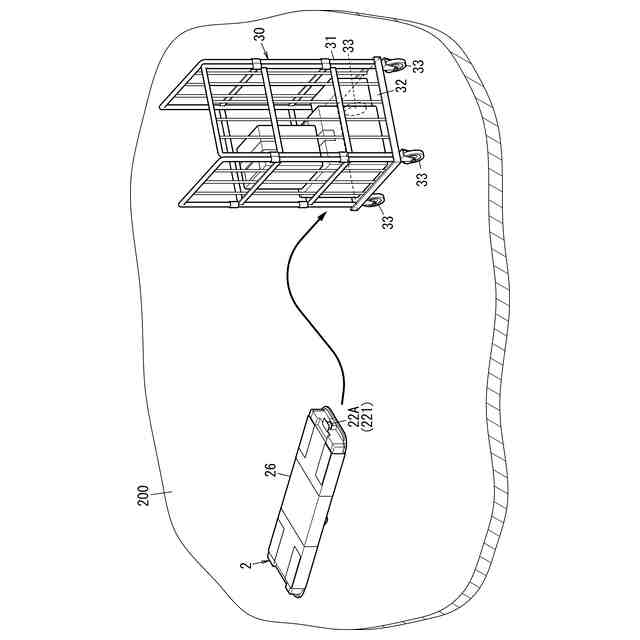
図3は、同上の移動体システムが対象物を保持する前の状態の斜視図である。
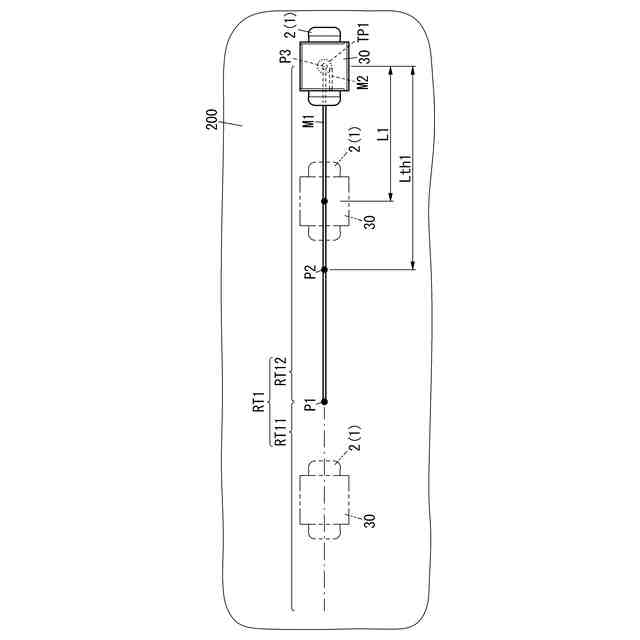
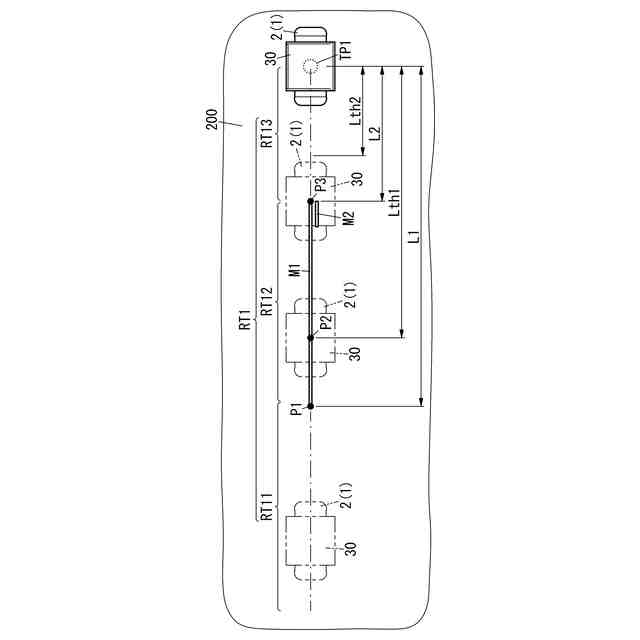
図4は、同上の移動体システムの誘導方式の遷移を説明する概略的な平面図である。
図5は、同上の移動体システムの誘導方式の遷移を説明する概略的な平面図である。
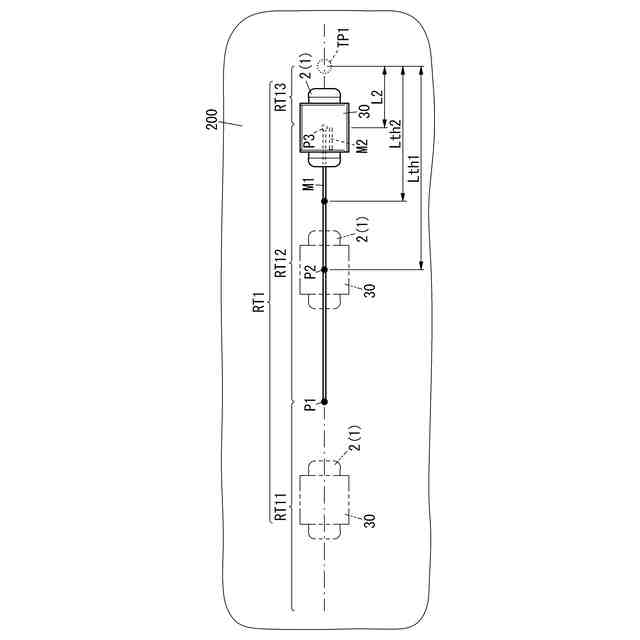
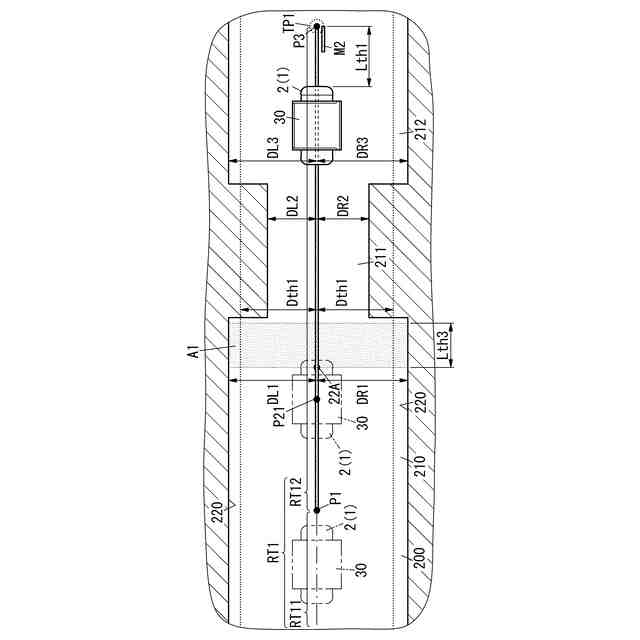
図6は、同上の移動体システムの誘導方式の遷移を説明する概略的な平面図である。
図7は、同上の移動体システムの誘導方式の遷移を説明する概略的な平面図である。
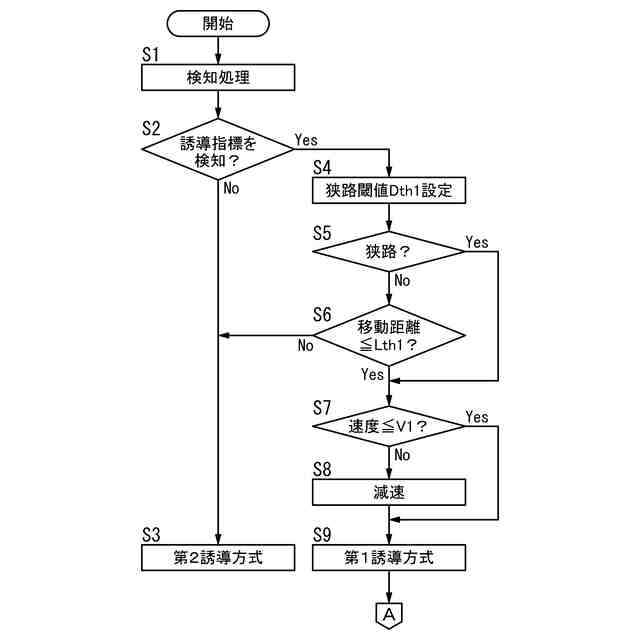
図8は、同上の移動体システムの移動体制御方法を説明するフローチャートである。
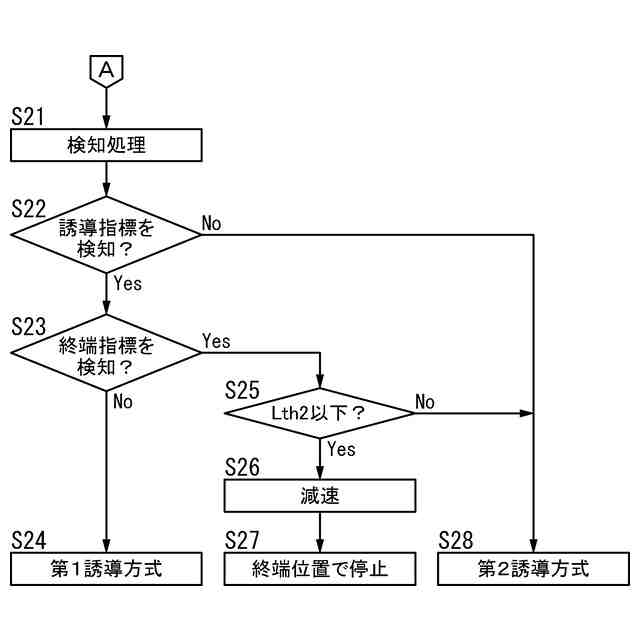
図9は、同上の移動体システムの移動体制御方法を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
6日前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
15日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
29日前
株式会社オプトン
制御プログラム生成装置
28日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社やまびこ
走行制御装置
3か月前
株式会社ダイフク
物品搬送設備
21日前
株式会社ダイフク
物品搬送設備
28日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
28日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社テイエルブイ
減圧弁の制御装置
1日前
オムロン株式会社
安全装置
28日前
シンフォニアテクノロジー株式会社
異常検知装置
28日前
株式会社計数技研
移動体、及びプログラム
2か月前
WHILL株式会社
電動モビリティ
2か月前
三菱電機株式会社
電源回路
15日前
日本信号株式会社
自走式装置
2か月前
株式会社ダイフク
飛行体制御システム
17日前
株式会社ダイヘン
搬送車
2か月前
ローム株式会社
半導体装置
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
10日前
株式会社ダイヘン
搬送車
3か月前
株式会社ダイヘン
搬送車
3か月前
株式会社ダイヘン
搬送車
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ