TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107070
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000813
出願日
2024-01-05
発明の名称
搬送システム、搬送制御方法及びプログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人北斗特許事務所
主分類
G05B
19/418 20060101AFI20250710BHJP(制御;調整)
要約
【課題】適切な数の搬送装置を稼働させる。
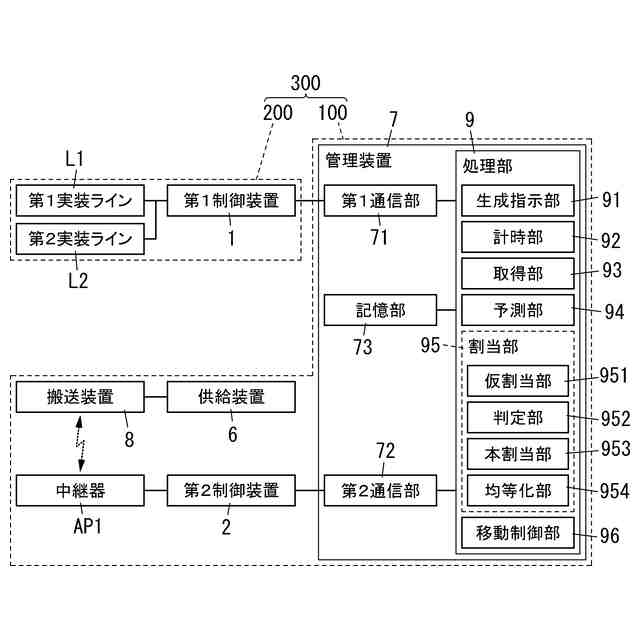
【解決手段】搬送システム100は、取得部93と、予測部94と、割当部95と、を備える。取得部93は、複数の部品保持装置から供給される部品を基材に取り付けることによって生産される製品の生産実績を含む生産実績情報を取得する。予測部94は、生産実績情報に基づいて、複数の部品保持装置のそれぞれにおいて部品が無くなるタイミングを含む予測情報を生成する。割当部95は、複数の部品保持装置のうちから部品を補給する対象である対象装置を、部品の補給を行う搬送装置8に割り当てる。割当部95は、複数の部品保持装置のそれぞれにおいて部品が無くなる前に、複数の部品保持装置のそれぞれへの部品の補給が実施されるように、予測情報に基づいて、複数の部品保持装置のうちから対象装置を割り当てる搬送装置8の数を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の部品保持装置から供給される部品を基材に取り付けることによって生産される製品の生産実績を含む生産実績情報を取得する取得部と、
前記生産実績情報に基づいて、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなるタイミングを含む予測情報を生成する予測部と、
前記複数の部品保持装置のうちから前記部品を補給する対象である対象装置を、前記部品の補給を行う搬送装置に割り当てる割当部と、を備え、
前記割当部は、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなる前に、前記複数の部品保持装置のそれぞれへの前記部品の補給が実施されるように、前記予測情報に基づいて、前記複数の部品保持装置のうちから前記対象装置を割り当てる前記搬送装置の数を決定する、
搬送システム。
続きを表示(約 1,100 文字)
【請求項2】
前記予測部は、所定の間隔で前記予測情報を更新する、
請求項1に記載の搬送システム。
【請求項3】
前記割当部は、前記搬送装置を含み前記部品の補給を行う複数の搬送装置に前記対象装置を割り当てる場合に、前記複数の搬送装置のそれぞれが前記対象装置への前記部品の補給を行ったときの前記複数の搬送装置のそれぞれの作業時間が均等となるように、前記対象装置を前記複数の搬送装置のそれぞれに割り当てる、
請求項1又は2に記載の搬送システム。
【請求項4】
前記割当部は、前記搬送装置を含み前記部品の補給を行う複数の搬送装置に前記対象装置を割り当てる場合に、前記複数の部品保持装置のうちから同数の前記対象装置を前記複数の搬送装置のそれぞれに割り当てる、
請求項1又は2に記載の搬送システム。
【請求項5】
前記割当部は、前記搬送装置を含み前記部品の補給を行う複数の搬送装置に前記対象装置を割り当てる場合に、前記複数の部品保持装置のうちから連続して並んだ2以上の部品保持装置を前記対象装置として前記複数の搬送装置のそれぞれに割り当てる、
請求項1又は2に記載の搬送システム。
【請求項6】
前記複数の搬送装置の移動を制御する移動制御部を更に備え、
前記移動制御部は、前記複数の搬送装置のうち、前記割当部が割り当てた前記対象装置が基準点から遠い方の搬送装置から、前記対象装置に向けて移動を開始させる、
請求項5に記載の搬送システム。
【請求項7】
複数の部品保持装置から供給される部品を基材に取り付けることによって生産される製品の生産実績を含む生産実績情報を取得する取得ステップと、
前記生産実績情報に基づいて、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなるタイミングを含む予測情報を生成する予測ステップと、
前記複数の部品保持装置のうちから前記部品を補給する対象である対象装置を、前記部品の補給を行う搬送装置に割り当てる割当ステップと、を含み、
前記割当ステップでは、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなる前に、前記複数の部品保持装置のそれぞれへの前記部品の補給が実施されるように、前記予測情報に基づいて、前記複数の部品保持装置のうちから前記対象装置を割り当てる前記搬送装置の数を決定する、
搬送制御方法。
【請求項8】
請求項7に記載の搬送制御方法を、1以上のプロセッサに実行させるための
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に搬送システム、搬送制御方法及びプログラムに関し、より詳細には、製品の生産装置に部品を供給するための搬送システム、搬送制御方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載の生産管理装置は、計画取得部と、実績取得部と、シミュレーション部と、乖離度判断部と、判断報知部と、を備える。計画取得部は、製品を生産するための複数の装置を有する生産システムにおいて生産の進行状況を予め定めた生産計画を取得する。実績取得部は、生産システムにおける実際の生産の進行状況である生産実績を取得する。シミュレーション部は、生産実績に基づき今後の生産の進行状況をシミュレートして第一生産予測を導出する。乖離度判断部は、生産計画に対する第一生産予測の乖離状態を示す第一乖離度を算出し、第一時間後の第一乖離度が第一閾値以上であるか否かを判断する。判断報知部は、第一乖離度が第一閾値以上であると乖離度判断部が判断した場合に判断情報を報知する。
【先行技術文献】
【特許文献】
【0003】
特開2021-196664号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような生産管理装置に用いられる搬送装置について、製品の生産実績に基づいてシミュレートされた今後の生産の進行状況に対して過不足のない適切な数の搬送装置を稼働させたいという要求がある。
【0005】
本開示は上記事由に鑑みてなされ、適切な数の搬送装置を稼働させることができる搬送システム、搬送制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る搬送システムは、取得部と、予測部と、割当部と、を備える。前記取得部は、複数の部品保持装置から供給される部品を基材に取り付けることによって生産される製品の生産実績を含む生産実績情報を取得する。前記予測部は、前記生産実績情報に基づいて、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなるタイミングを含む予測情報を生成する。前記割当部は、前記複数の部品保持装置のうちから前記部品を補給する対象である対象装置を、前記部品の補給を行う搬送装置に割り当てる。前記割当部は、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなる前に、前記複数の部品保持装置のそれぞれへの前記部品の補給が実施されるように、前記予測情報に基づいて、前記複数の部品保持装置のうちから前記対象装置を割り当てる前記搬送装置の数を決定する。
【0007】
本開示の一態様に係る搬送制御方法は、取得ステップと、予測ステップと、割当ステップと、を含む。前記取得ステップは、複数の部品保持装置から供給される部品を基材に取り付けることによって生産される製品の生産実績を含む生産実績情報を取得する。前記予測ステップは、前記生産実績情報に基づいて、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなるタイミングを含む予測情報を生成する。前記割当ステップは、前記複数の部品保持装置のうちから前記部品を補給する対象である対象装置を、前記部品の補給を行う搬送装置に割り当てる。前記割当ステップでは、前記複数の部品保持装置のそれぞれにおいて前記部品が無くなる前に、前記複数の部品保持装置のそれぞれへの前記部品の補給が実施されるように、前記予測情報に基づいて、前記複数の部品保持装置のうちから前記対象装置を割り当てる前記搬送装置の数を決定する。
【0008】
本開示の一態様に係るプログラムは、前記搬送制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、適切な数の搬送装置を稼働させることができる。
【図面の簡単な説明】
【0010】
図1は、本開示の一実施形態に係る搬送システムを含む製造システムのブロック図である。
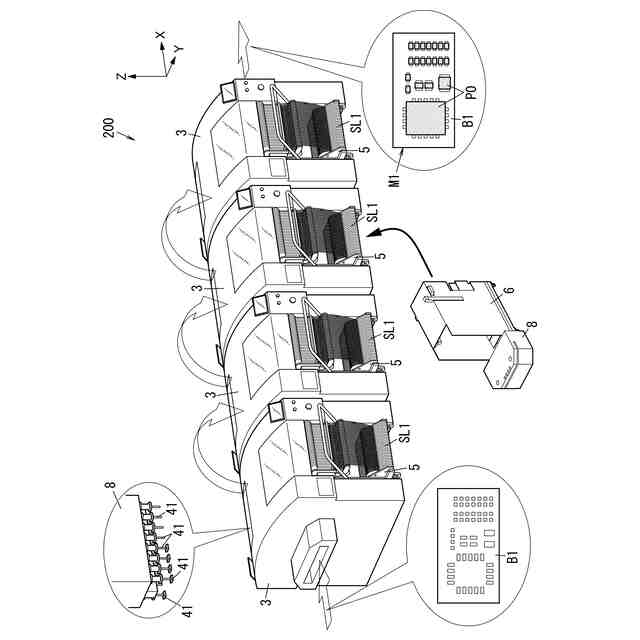
図2は、同上の製造システムが備える部品実装システムの説明図である。
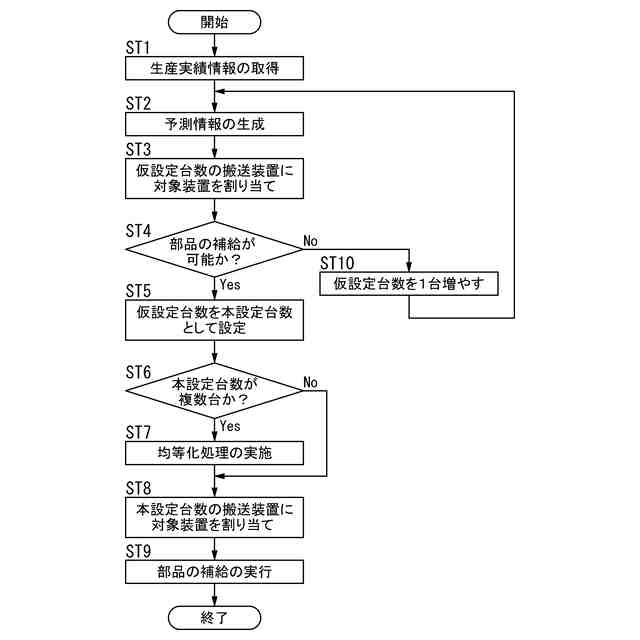
図3は、同上の搬送システムの動作を説明するためのフローチャートである。
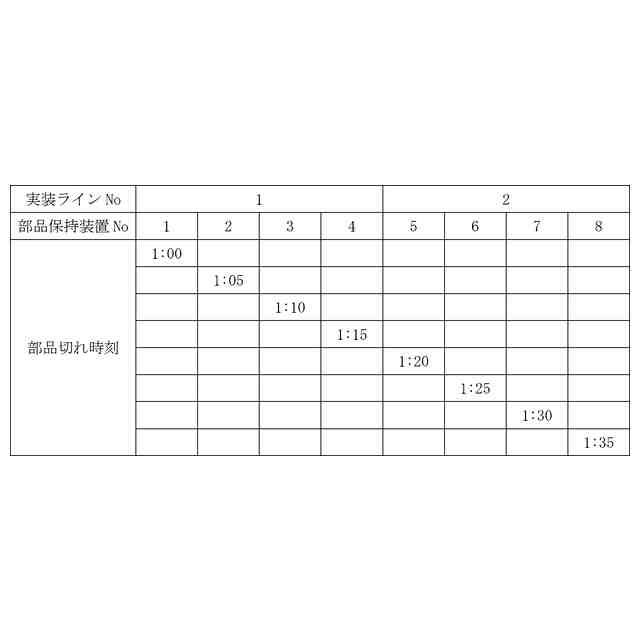
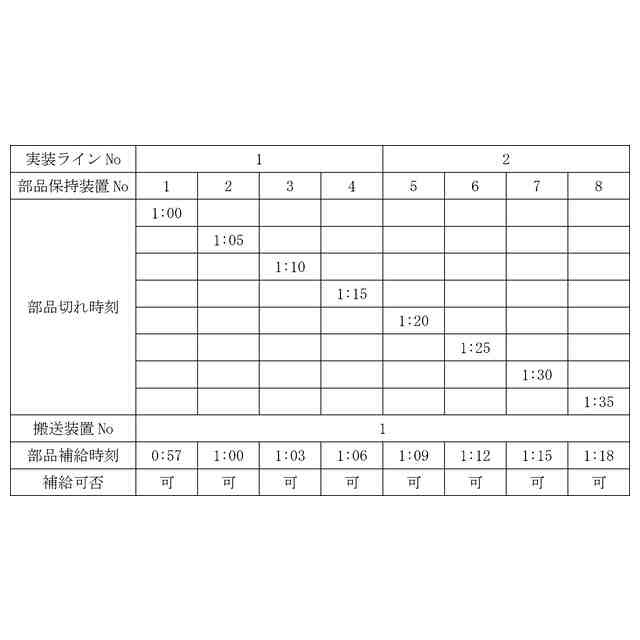
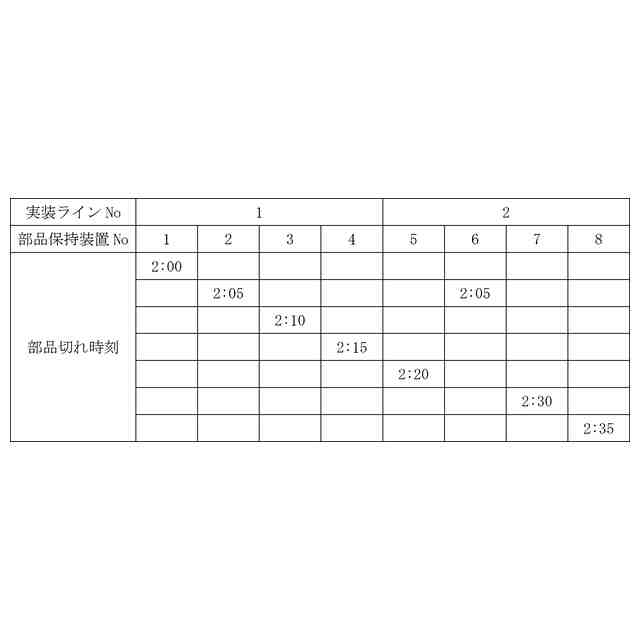
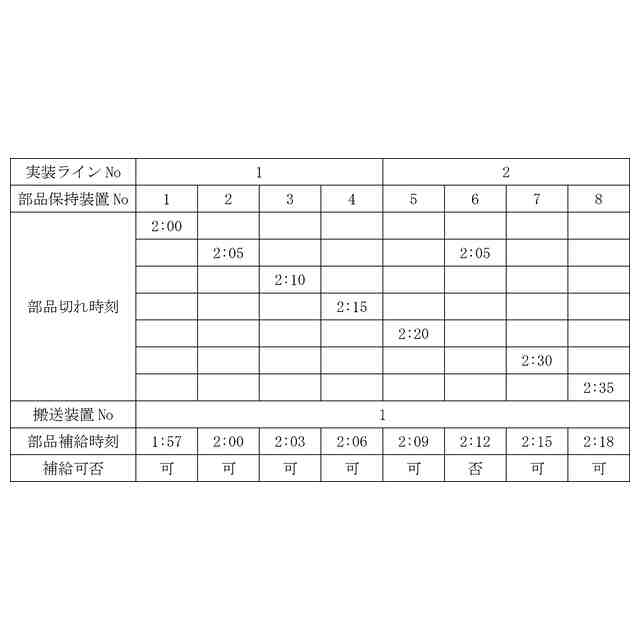
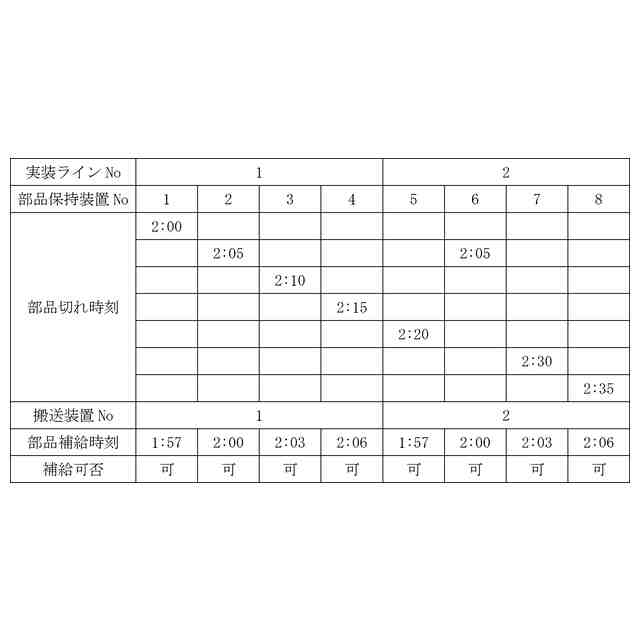
図4は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図5は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図6は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図7は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図8は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図9は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
図10は、同上の搬送システムによる部品保持装置への部品の補給作業を説明するための平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
10日前
株式会社クボタ
作業車
3か月前
ローム株式会社
半導体集積回路
3か月前
株式会社ダイフク
搬送車
3か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
3か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
株式会社オプトン
制御プログラム生成装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
19日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
3か月前
マーク ヘイリー
消防ロボット
3日前
株式会社ダイフク
物品搬送設備
25日前
株式会社やまびこ
走行制御装置
3か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社テイエルブイ
減圧弁の制御装置
5日前
株式会社タブチ
減圧弁
3か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
三菱電機株式会社
電源回路
19日前
オムロン株式会社
安全装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































