TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103252
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220517
出願日
2023-12-27
発明の名称
アクチュエーター
出願人
株式会社アイエイアイ
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250702BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】駆動ユニットへの伝達ケーブルの接続を容易にすることができるアクチュエーターを提供する。
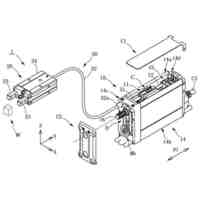
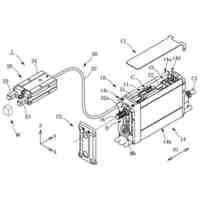
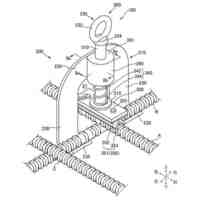
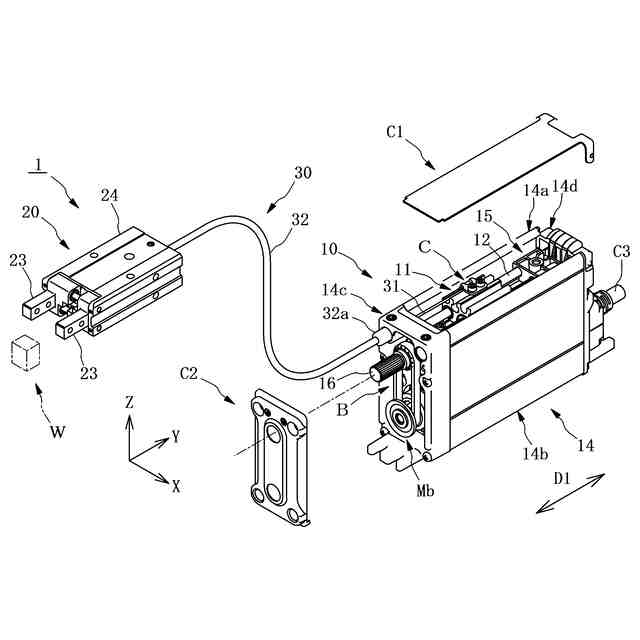
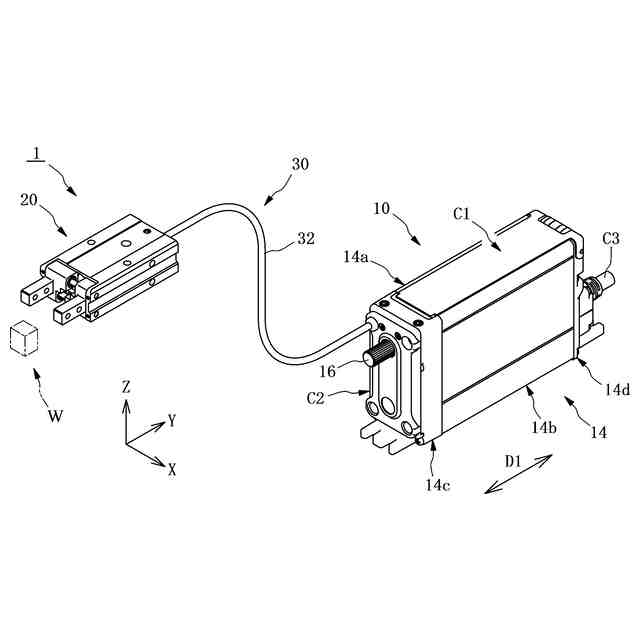
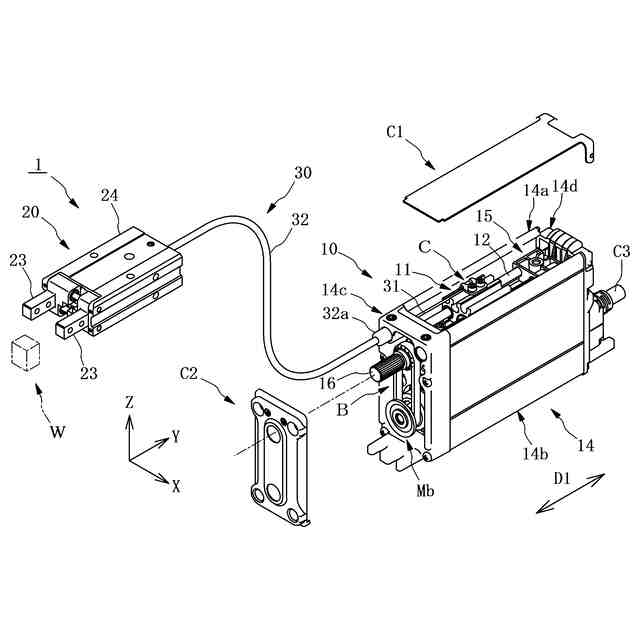
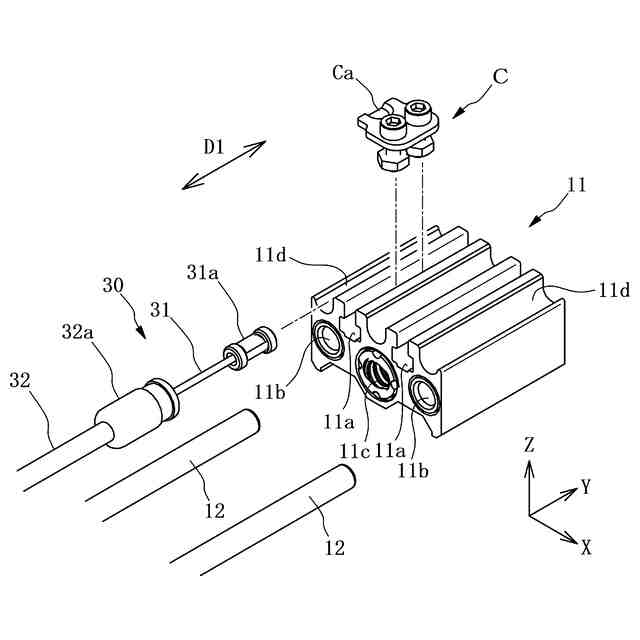
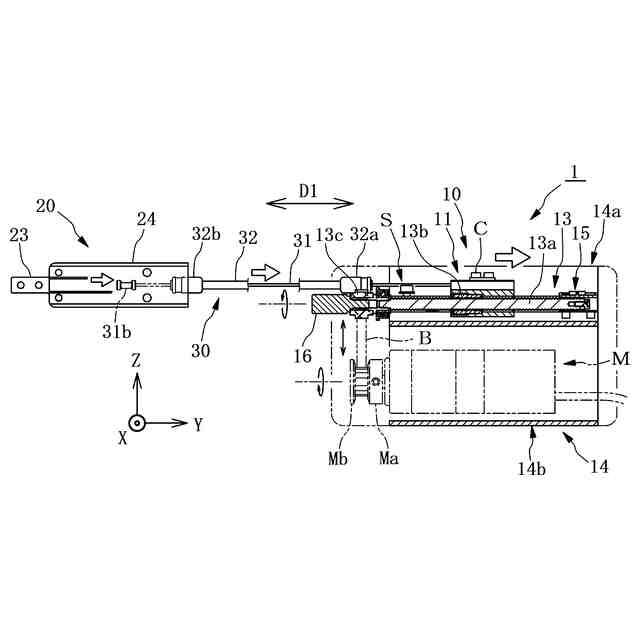
【解決手段】アクチュエーター1は、進退移動可能に設けられている移動部材11を有する駆動ユニット10と、駆動ユニット10から分離して設けられている作動ユニット20と、駆動ユニット10と作動ユニット20とを連結すると共に、移動部材11の進退運動を作動ユニット20に伝達して、作動ユニット20を動作させるための伝達ケーブル31を有する伝達ケーブルユニット30とを備える。移動部材11は、伝達ケーブル31の一端部が接続されるケーブル接続部Cを有する。駆動ユニット10は、移動部材11を進退自在に支持するフレーム14と、移動部材11を進退させる駆動機構とを有する。移動部材11のケーブル接続部Cは、第1移動部材11に対する伝達ケーブル31の一端部の接続位置が変更可能に設けられている。
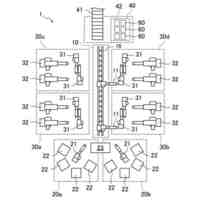
【選択図】図2
特許請求の範囲
【請求項1】
進退移動可能に設けられている第1移動部材を有する駆動ユニットと、
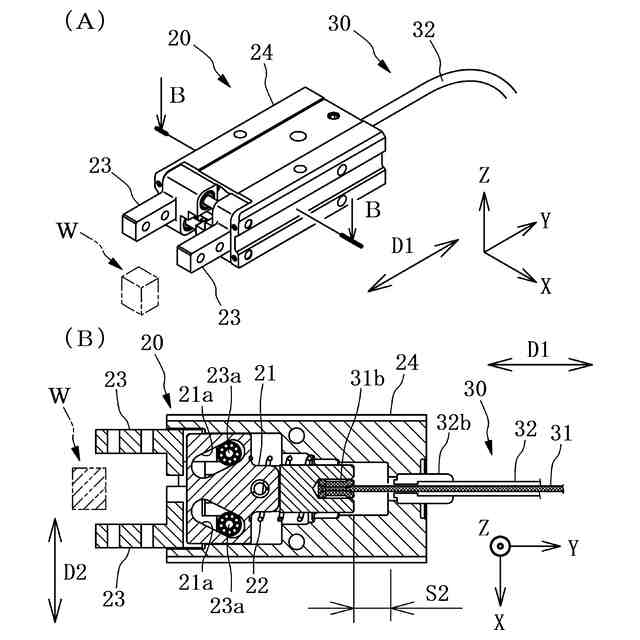
前記駆動ユニットから分離して設けられている作動ユニットと、
前記駆動ユニットと前記作動ユニットとを連結すると共に、前記第1移動部材の進退運動を前記作動ユニットに伝達して、前記作動ユニットを動作させるための伝達ケーブルを有する伝達ケーブルユニットと、を備え、
前記第1移動部材は、前記伝達ケーブルの一端部が接続されるケーブル接続部を有し、
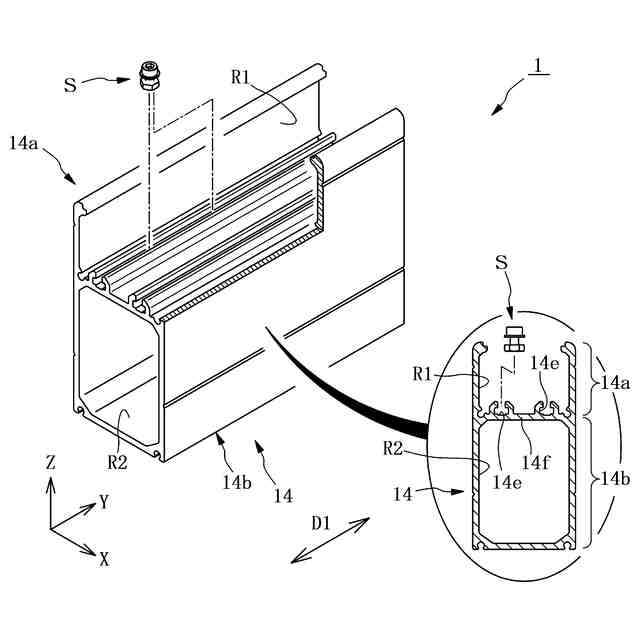
前記駆動ユニットは、前記第1移動部材を進退自在に支持するフレームと、前記第1移動部材を進退させる駆動機構と、を有し、
前記第1移動部材の前記ケーブル接続部は、前記第1移動部材に対する前記伝達ケーブルの一端部の接続位置が変更可能に設けられている、アクチュエーター。
続きを表示(約 930 文字)
【請求項2】
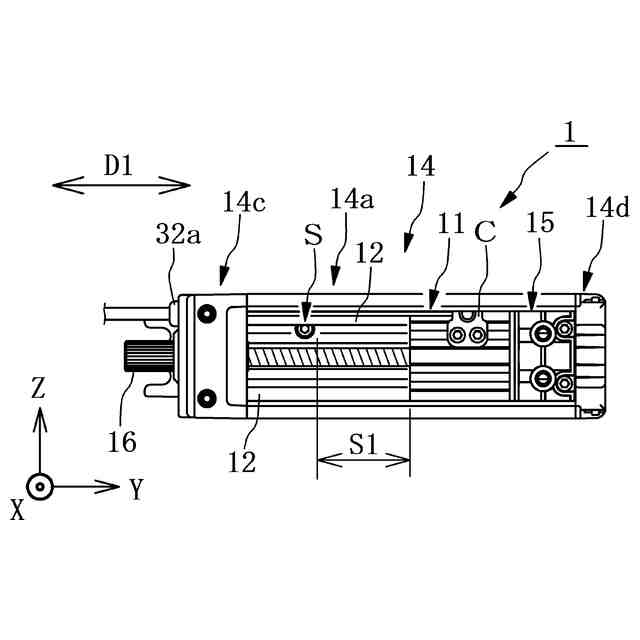
前記ケーブル接続部は、前記第1移動部材に対する前記伝達ケーブルの一端部の接続位置が、前記第1移動部材の進退方向に変更可能に設けられている、請求項1に記載のアクチュエーター。
【請求項3】
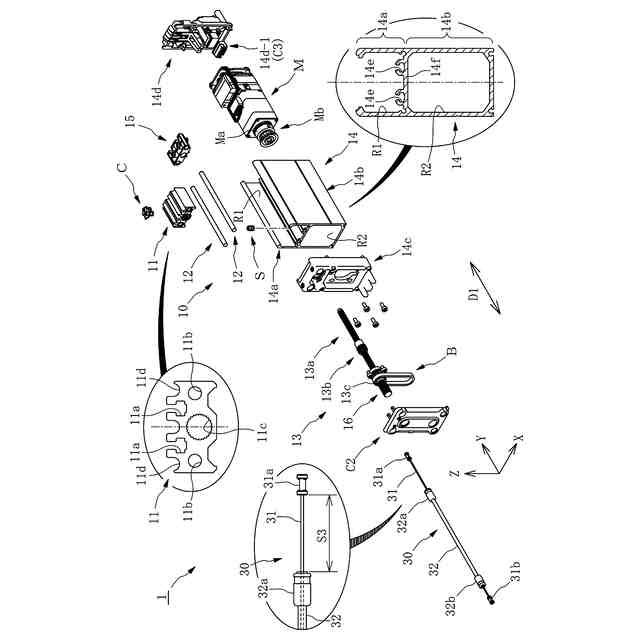
前記第1移動部材には、前記進退方向に延設されているT溝が形成され、
前記ケーブル接続部は、前記T溝に設置され、互いの螺合により、前記T溝に対する設置位置が変更可能なナット及びボルトを有する、請求項2に記載のアクチュエーター。
【請求項4】
前記ケーブル接続部は、前記伝達ケーブルの一端部を前記第1移動部材に押さえるケーブル押さえ部材を有し、
前記ケーブル押さえ部材には、前記ボルトが挿入されると共に、前記進退方向を長手方向とする長孔が形成されている、請求項3に記載のアクチュエーター。
【請求項5】
前記ケーブル接続部は、前記第1移動部材に複数設置されている、請求項1に記載のアクチュエーター。
【請求項6】
複数の前記ケーブル接続部は、前記第1移動部材の進退方向に直交する方向に並んで配置されている、請求項5に記載のアクチュエーター。
【請求項7】
複数の前記ケーブル接続部は、それぞれが前記第1移動部材に対する設置位置が変更可能に設けられている、請求項5に記載のアクチュエーター。
【請求項8】
前記作動ユニットは、前記伝達ケーブルの他端部が接続される第2移動部材を有し、
前記第2移動部材は、前記第1移動部材の進退運動が、前記伝達ケーブルによって伝達されることで進退運動する、請求項1に記載のアクチュエーター。
【請求項9】
前記伝達ケーブルユニットは、中空のアウターケーブルを有し、
前記伝達ケーブルは、前記アウターケーブルの両端部から突出しつつ、前記アウターケーブルに挿通される、請求項1に記載のアクチュエーター。
【請求項10】
前記アウターケーブルの一端部は、前記駆動ユニットが有する前記フレームに接続される、請求項9に記載のアクチュエーター。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクチュエーターに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、3軸直交ロボットにおけるZ軸方向に移動可能に設けられている作用子(移動部材)を有するZ移動作用部と、ベース部に設置されたZ軸方向駆動ユニットとを備え、それらが伝達ケーブルで接続された3軸直交ロボットが開示されている。Z軸方向駆動ユニットは、ステップモーターと、ステップモーターの出力軸の回転に伴って回転するボールねじと、ボールねじに取り付けられたボールねじナットとを有する。このボールねじナットは、ボールねじの回転に基づいて、所定のストロークの範囲で進退運動する。
【0003】
特許文献1に開示のものにおいては、Z軸方向駆動ユニットのボールねじナットの進退運動が、当該伝達ケーブルによって、Z移動作用部の作用子に伝達される。この結果、Z軸方向駆動ユニットの駆動力によって、Z移動作用部の作用子は、+Z方向及び-Z方向の双方向に進退運動する。
【先行技術文献】
【特許文献】
【0004】
特許第3964273号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示のものにおいては、用途に応じて、作用子(移動部材)のストロークが異なる別のZ移動作用部(作用ユニット)に取り替えることがある。この場合、Z移動作用部の種類が変わったり、その作用子のストロークが変わったりすることで、Z移動作用部からの伝達ケーブルの突出長さが変わることがある。そうすると、伝達ケーブルの突出方向の先端部を、Z軸方向駆動ユニット(駆動ユニット)に接続することが難しくなるおそれがある。
【0006】
本発明は、上述の事情の下になされたもので、駆動ユニットへの伝達ケーブルの接続を容易にすることができるアクチュエーターを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明に係るアクチュエーターは、
進退移動可能に設けられている第1移動部材を有する駆動ユニットと、
前記駆動ユニットから分離して設けられている作動ユニットと、
前記駆動ユニットと前記作動ユニットとを連結すると共に、前記第1移動部材の進退運動を前記作動ユニットに伝達して、前記作動ユニットを動作させるための伝達ケーブルを有する伝達ケーブルユニットと、を備え、
前記第1移動部材は、前記伝達ケーブルの一端部が接続されるケーブル接続部を有し、
前記駆動ユニットは、前記第1移動部材を進退自在に支持するフレームと、前記第1移動部材を進退させる駆動機構と、を有し、
前記第1移動部材の前記ケーブル接続部は、前記第1移動部材に対する前記伝達ケーブルの一端部の接続位置が変更可能に設けられている。
【0008】
前記ケーブル接続部は、前記第1移動部材に対する前記伝達ケーブルの一端部の接続位置が、前記第1移動部材の進退方向に変更可能に設けられていてもよい。
【0009】
前記第1移動部材には、前記進退方向に延設されているT溝が形成され、
前記ケーブル接続部は、前記T溝に設置され、互いの螺合により、前記T溝に対する設置位置が変更可能なナット及びボルトを有してもよい。
【0010】
前記ケーブル接続部は、前記伝達ケーブルの一端部を前記第1移動部材に押さえるケーブル押さえ部材を有し、
前記ケーブル押さえ部材には、前記ボルトが挿入されると共に、前記進退方向を長手方向とする長孔が形成されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイエイアイ
アクチュエーター
28日前
株式会社アイエイアイ
アクチュエーター
28日前
株式会社アイエイアイ
回生電力制御装置、及び電力制御装置
1か月前
株式会社アイエイアイ
コネクター方向変換構造とモーターユニットとアクチュエーター
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
27日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
28日前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
積水ハウス株式会社
フィルム除去具
今日
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社不二越
協働ロボットシステム
5日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
9日前
コネクテッドロボティクス株式会社
保持システム
2日前
株式会社マキタ
打撃工具
5日前
北越メタル株式会社
鉄筋保持具
5日前
川崎重工業株式会社
作業設備
6日前
工機ホールディングス株式会社
集塵装置及び作業機
27日前
株式会社マキタ
打撃工具
9日前
AMATAMA株式会社
制御装置
29日前
コネクテッドロボティクス株式会社
ロボットシステム
今日
トヨタ自動車株式会社
ピッキングロボット装置
13日前
日産自動車株式会社
ロックプレートの圧入治具
28日前
コネクテッドロボティクス株式会社
ロボットシステム
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ