TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103251
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220516
出願日
2023-12-27
発明の名称
アクチュエーター
出願人
株式会社アイエイアイ
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250702BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】伝達ケーブルに負荷が加わることを抑制することができるアクチュエーターを提供する。
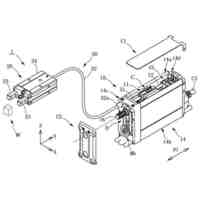
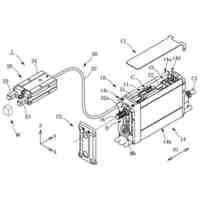
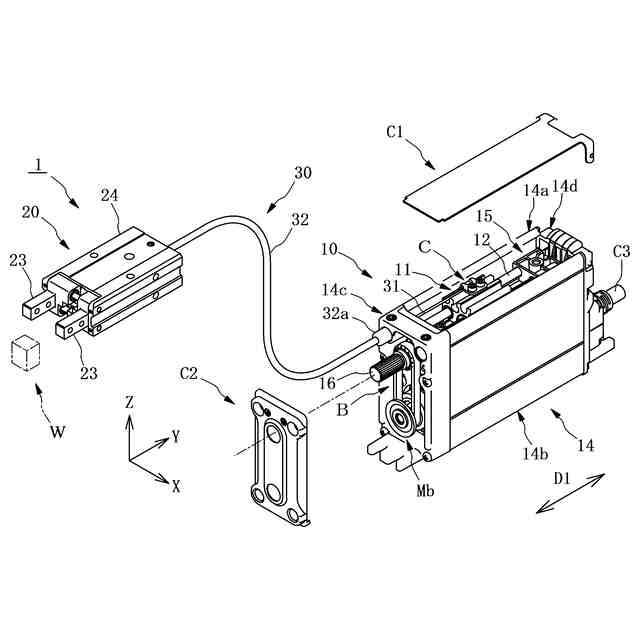
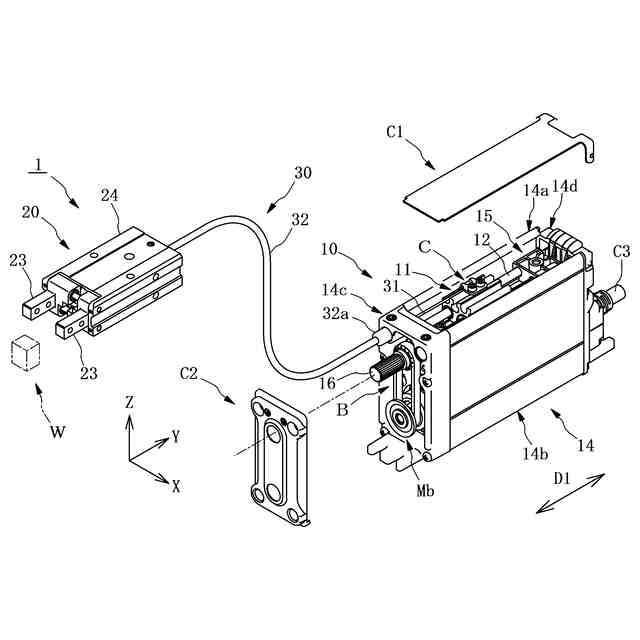
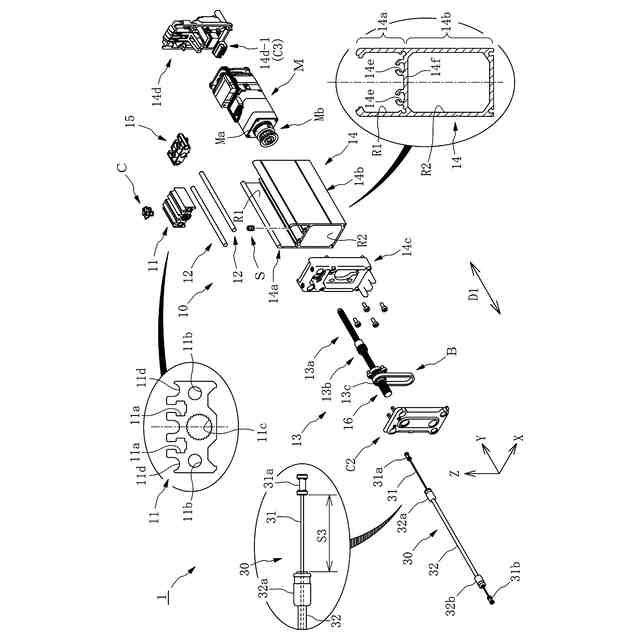
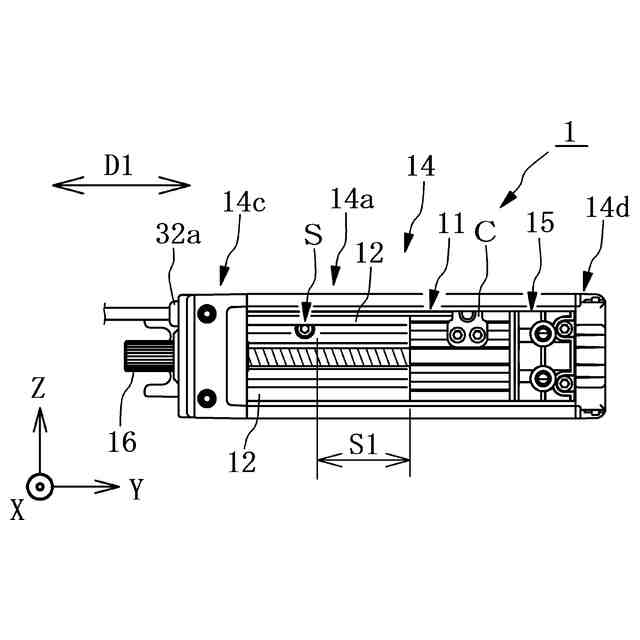
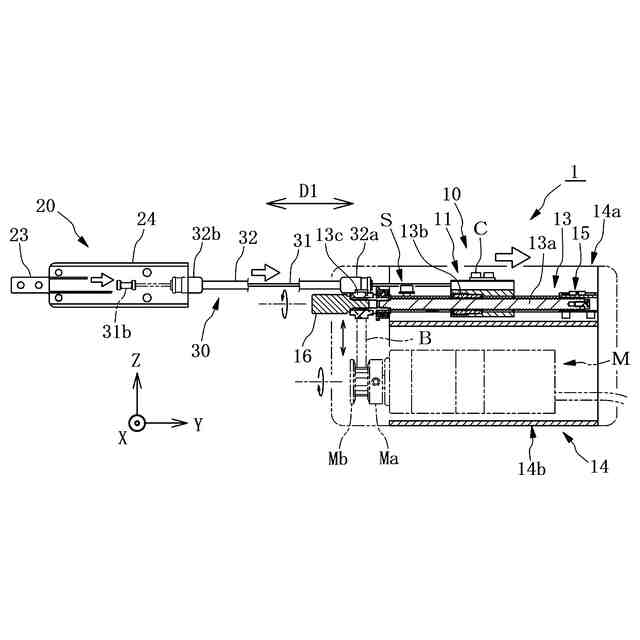
【解決手段】アクチュエーター1は、進退移動可能に設けられている第1移動部材11を有する駆動ユニット10と、駆動ユニット10から分離して設けられている作動ユニット20と、駆動ユニット10と作動ユニット20とを連結すると共に、第1移動部材11の進退運動を作動ユニット20に伝達して、作動ユニット20を動作させるための伝達ケーブル31を有する伝達ケーブルユニット30とを備える。駆動ユニット10は、第1移動部材11を進退自在に支持するフレーム14と、第1移動部材11を進退させる駆動機構と、第1移動部材11の進退方向D1の少なくとも一方側への移動を制限することで、第1移動部材11のストロークを制限するストッパーとを有する。
【選択図】図2
特許請求の範囲
【請求項1】
進退移動可能に設けられている第1移動部材を有する駆動ユニットと、
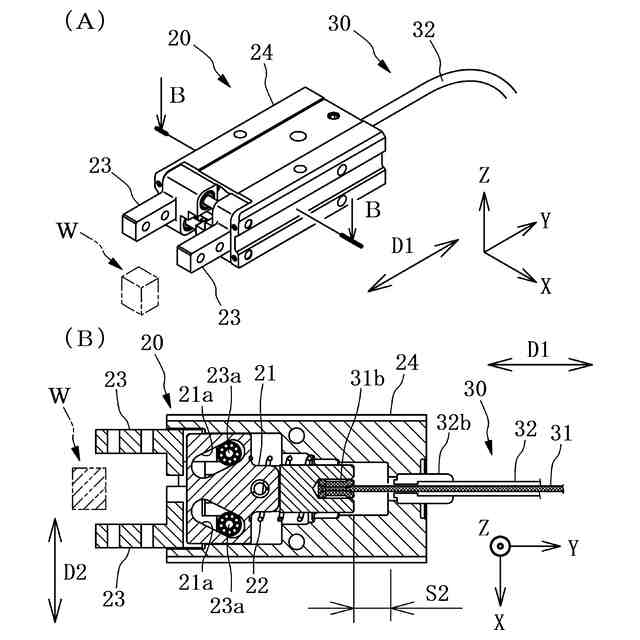
前記駆動ユニットから分離して設けられている作動ユニットと、
前記駆動ユニットと前記作動ユニットとを連結すると共に、前記第1移動部材の進退運動を前記作動ユニットに伝達して、前記作動ユニットを動作させるための伝達ケーブルを有する伝達ケーブルユニットと、を備え、
前記駆動ユニットは、前記第1移動部材を進退自在に支持するフレームと、前記第1移動部材を進退させる駆動機構と、前記第1移動部材の進退方向の少なくとも一方側への移動を制限することで、前記第1移動部材のストロークを制限するストッパーと、を有する、アクチュエーター。
続きを表示(約 890 文字)
【請求項2】
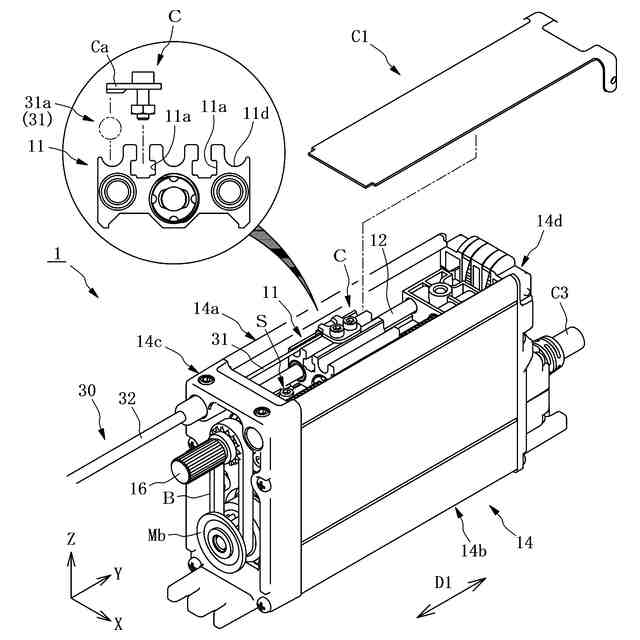
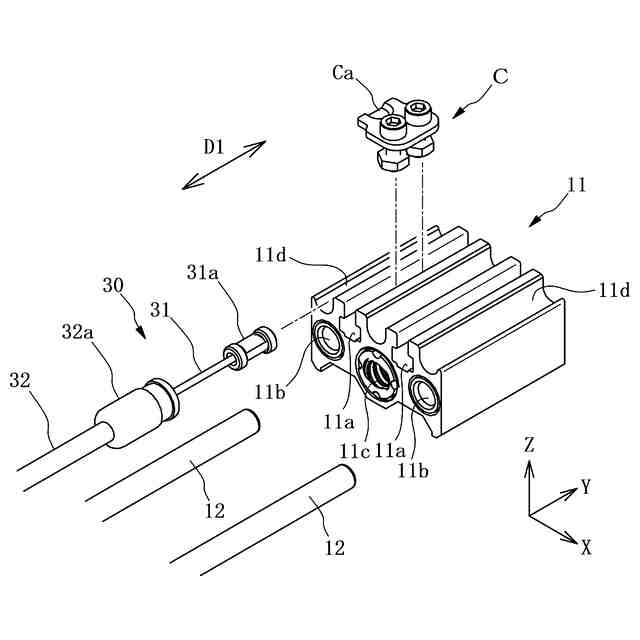
前記第1移動部材は、前記伝達ケーブルの一端部が接続されるケーブル接続部を有する、請求項1に記載のアクチュエーター。
【請求項3】
前記作動ユニットは、前記伝達ケーブルの他端部が接続される第2移動部材を有し、
前記第2移動部材は、前記第1移動部材の進退運動が、前記伝達ケーブルによって伝達されることで進退運動する、請求項1に記載のアクチュエーター。
【請求項4】
前記ストッパーは、前記第1移動部材の前記進退方向における設置位置が変更可能に設けられている、請求項1に記載のアクチュエーター。
【請求項5】
前記ストッパーは、前記フレームに形成されたT溝に設置され、互いの螺合により、T溝に対する設置位置が変更可能なナット及びボルトを有する、請求項4に記載のアクチュエーター。
【請求項6】
前記駆動ユニットは、前記フレームに支持され、前記第1移動部材を進退自在に支持するガイドシャフトを有し、
前記ストッパーは、前記ガイドシャフトに取り付けられる部材である、請求項4に記載のアクチュエーター。
【請求項7】
前記伝達ケーブルユニットは、中空のアウターケーブルを有し、
前記伝達ケーブルは、前記アウターケーブルの両端部から突出しつつ、前記アウターケーブルに挿通される、請求項1に記載のアクチュエーター。
【請求項8】
前記アウターケーブルの一端部は、前記駆動ユニットが有する前記フレームに接続される、請求項7に記載のアクチュエーター。
【請求項9】
前記駆動機構は、
回転するねじ軸と、
前記ねじ軸の回転に伴って移動すると共に、前記第1移動部材が設置されているナットと、を有する、請求項1に記載のアクチュエーター。
【請求項10】
前記駆動機構の前記ねじ軸の端部には、前記ねじ軸を手動回転させることが可能なノブが設けられている、請求項9に記載のアクチュエーター。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクチュエーターに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、3軸直交ロボットにおけるZ軸方向に移動可能に設けられている作用子(移動部材)を有するZ移動作用部と、ベース部に設置されたZ軸方向駆動ユニットとを備え、それらが伝達ケーブルで接続された3軸直交ロボットが開示されている。Z軸方向駆動ユニットは、ステップモーターと、ステップモーターの出力軸の回転に伴って回転するボールねじと、ボールねじに取り付けられたボールねじナットとを有する。このボールねじナットは、ボールねじの回転に基づいて、所定のストロークの範囲で進退運動する。
【0003】
特許文献1に開示のものにおいては、Z軸方向駆動ユニットのボールねじナットの進退運動が、当該伝達ケーブルによって、Z移動作用部の作用子に伝達される。この結果、Z軸方向駆動ユニットの駆動力によって、Z移動作用部の作用子は、+Z方向及び-Z方向の双方向に進退運動する。
【先行技術文献】
【特許文献】
【0004】
特許第3964273号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示のものにおいては、用途に応じて、作用子(移動部材)のストロークが異なる別のZ移動作用部に取り替えることがある。取り替えられたZ移動作用部の作用子のストロークが、Z軸方向駆動ユニットのボールねじナットのストロークよりも小さい場合、Z移動作用部の作用子が移動し終わった後にも、Z軸方向駆動ユニットのボールねじナットが移動しようとする。そうすると、伝達ケーブルが、ボールねじナットの進退運動を、移動し終わったZ移動作用部の作用子に伝達するおそれがある。この結果、伝達ケーブルに大きな負荷が加わるおそれがある。
【0006】
本発明は、上述の事情の下になされたもので、伝達ケーブルに負荷が加わることを抑制することができるアクチュエーターを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明に係るアクチュエーターは、
進退移動可能に設けられている第1移動部材を有する駆動ユニットと、
前記駆動ユニットから分離して設けられている作動ユニットと、
前記駆動ユニットと前記作動ユニットとを連結すると共に、前記第1移動部材の進退運動を前記作動ユニットに伝達して、前記作動ユニットを動作させるための伝達ケーブルを有する伝達ケーブルユニットと、を備え、
前記駆動ユニットは、前記第1移動部材を進退自在に支持するフレームと、前記第1移動部材を進退させる駆動機構と、前記第1移動部材の進退方向の少なくとも一方側への移動を制限することで、前記第1移動部材のストロークを制限するストッパーと、を有する。
【0008】
前記第1移動部材は、前記伝達ケーブルの一端部が接続されるケーブル接続部を有してもよい。
【0009】
前記作動ユニットは、前記伝達ケーブルの他端部が接続される第2移動部材を有し、
前記第2移動部材は、前記第1移動部材の進退運動が、前記伝達ケーブルによって伝達されることで進退運動してもよい。
【0010】
前記ストッパーは、前記第1移動部材の前記進退方向における設置位置が変更可能に設けられていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイエイアイ
アクチュエーター
21日前
株式会社アイエイアイ
アクチュエーター
21日前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
23日前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
関節機構
2か月前
住友重機械工業株式会社
教示装置
20日前
個人
ペグハンマおよびペグハンマ用部品
27日前
株式会社ダイヘン
搬送装置
27日前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
21日前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
住友重機械工業株式会社
ロボット
2か月前
株式会社アイエイアイ
グリッパー
2か月前
住友重機械工業株式会社
支援装置
27日前
住友重機械工業株式会社
支援装置
27日前
庄内機械株式会社
釘打装置
2か月前
アピュアン株式会社
衝撃工具
29日前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電気機器
21日前
ホシデン株式会社
分解用治具
27日前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
芝浦機械株式会社
双腕ロボット
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ