TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101182
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217835
出願日
2023-12-25
発明の名称
フォークリフト
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20250630BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】荷台の適切な位置に対して荷役をすることができるフォークリフトを提供すること。
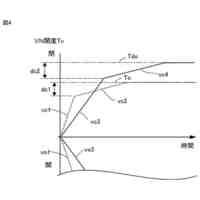
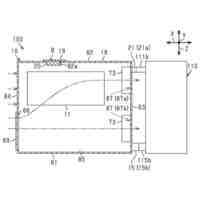
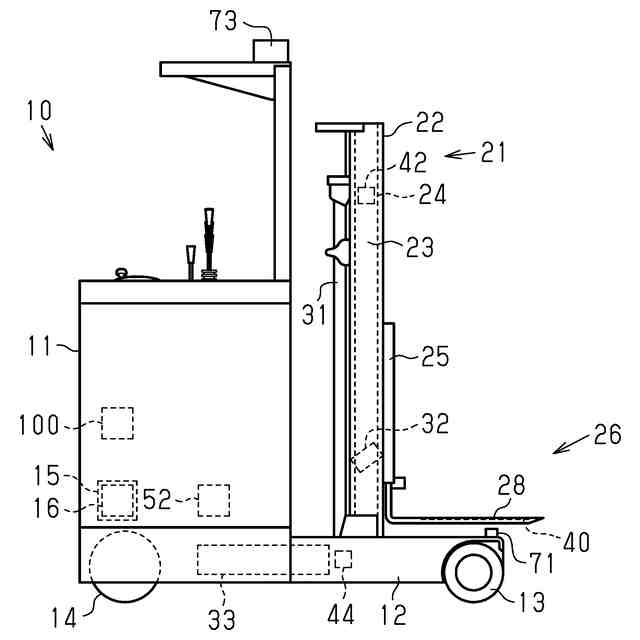
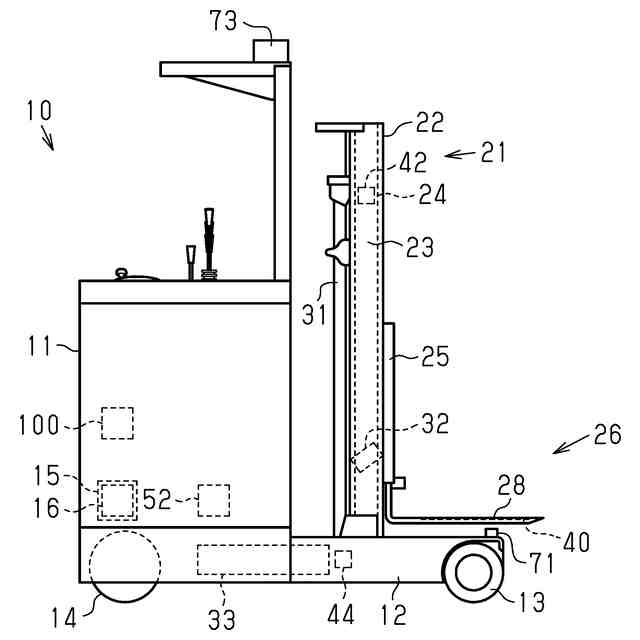
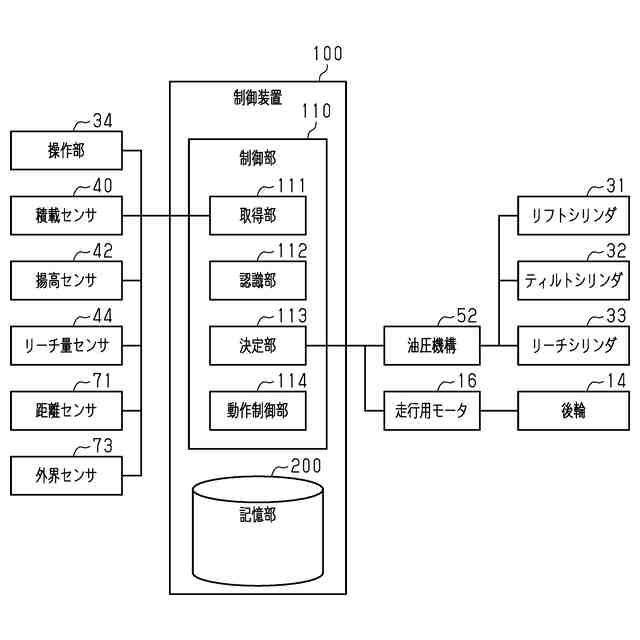
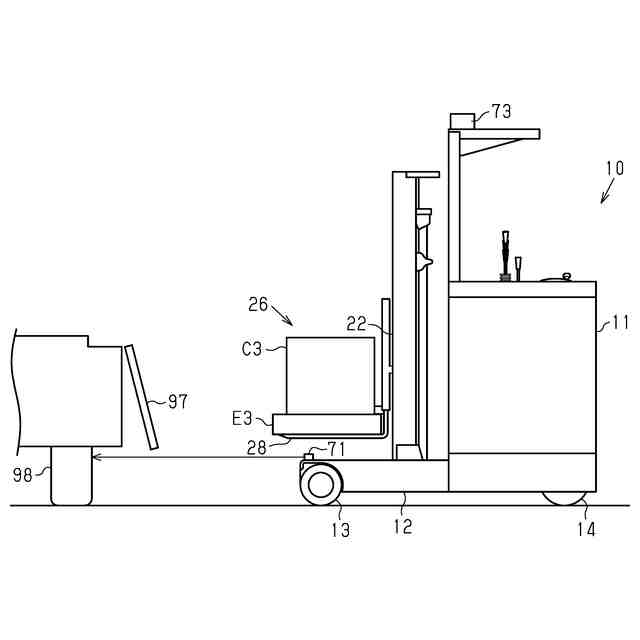
【解決手段】フォークリフト10は、トラックの荷台の上面である積載面に荷役を行うものであって、荷役を行う荷役装置21と、フォークリフト10の駆動を制御する駆動装置15と、前方に存在する物体までの距離を検出する距離センサ71と、距離センサ71の検出結果に基づいて、荷役装置21、及び駆動装置15を制御する制御装置100と、を備える。制御装置100は、距離センサ71の検出結果の特徴に応じて、検出位置から停止位置までの停止距離を決定しつつ、荷役に際して、決定された停止距離に基づいて、フォークリフト10を停止させる。
【選択図】図1
特許請求の範囲
【請求項1】
トラックの荷台の上面である積載面に荷役を行うフォークリフトであって、
荷役を行う荷役装置と、
フォークリフトの駆動を制御する駆動装置と、
前方に存在する物体までの距離を検出するセンサと、
前記センサの検出結果に基づいて、前記荷役装置、及び前記駆動装置を制御する制御装置と、を備え、
前記制御装置は、前記センサの検出結果の特徴に応じて、検出位置から停止位置までの停止距離を決定しつつ、荷役に際して、決定した前記停止距離に基づいて、フォークリフトを停止させる、
フォークリフト。
続きを表示(約 390 文字)
【請求項2】
前記制御装置は、前記センサの検出結果の特徴が前記トラックのあおりを示す場合、前記停止距離を第1距離に決定しつつ、前記センサの検出結果の特徴が前記トラックのタイヤを示す場合、前記停止距離を、前記第1距離とは異なる第2距離に決定する、
請求項1に記載のフォークリフト。
【請求項3】
前記第2距離は、前記第1距離よりは長い、
請求項2に記載のフォークリフト。
【請求項4】
前記制御装置は、前記センサの検出結果の特徴が、予め定められた物体の特徴を示さない場合、フォークリフトを停止させる、
請求項1に記載のフォークリフト。
【請求項5】
前記制御装置は、前記荷役を行う対象の前記トラックの種類を示す情報に更に基づいて、前記停止距離を決定する、
請求項1に記載のフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フォークリフトに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、自己位置推定用外界センサを用いて周囲環境を認識することで、荷役を行うフォークリフトに関する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-030983号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
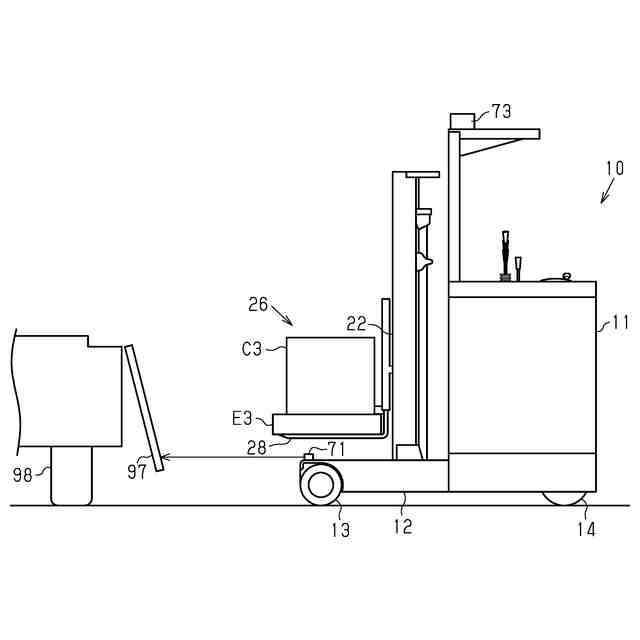
特許文献1に開示の方法では、トラックの荷台の上面である積載面等を精度よく認識することまでは困難である場合があった。この場合、荷の積載位置にずれが生じ、手前に荷を積載した場合にはトラックのあおりを閉められなかったり、奥に荷を積載した場合には反対側から荷を積載できなくなったりする場合があった。
【課題を解決するための手段】
【0005】
上記目的を達成するフォークリフトは、トラックの荷台の上面である積載面に荷役を行うフォークリフトであって、荷役を行う荷役装置と、フォークリフトの駆動を制御する駆動装置と、前方に存在する物体までの距離を検出するセンサと、前記センサの検出結果に基づいて、前記荷役装置、及び前記駆動装置を制御する制御装置と、を備え、前記制御装置は、前記センサの検出結果の特徴に応じて、検出位置から停止位置までの停止距離を決定しつつ、荷役に際して、決定した前記停止距離に基づいて、フォークリフトを停止させる、ことを特徴とする。
【0006】
かかる構成によれば、荷台の適切な位置に対して荷役をすることができる。
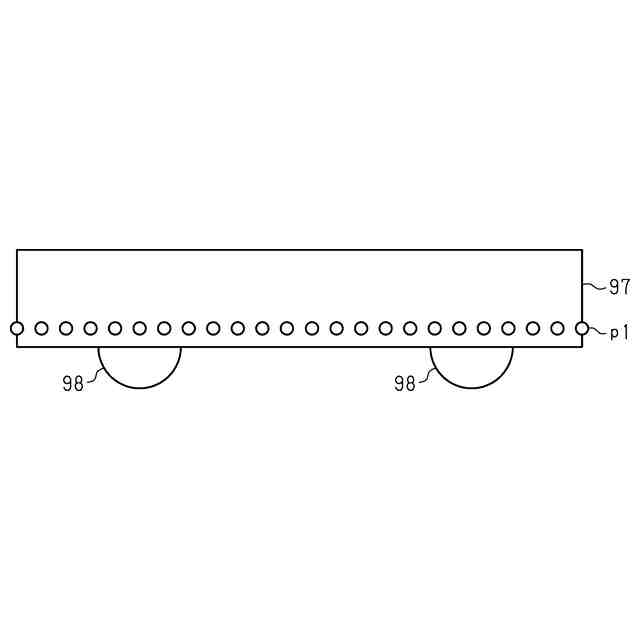
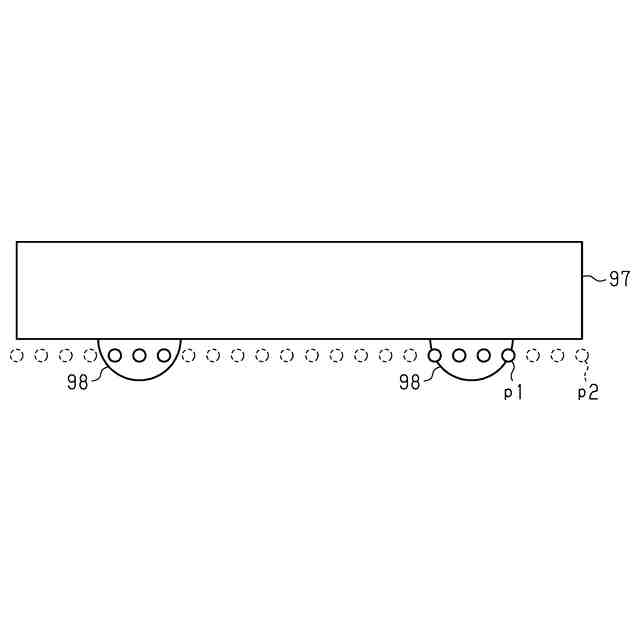
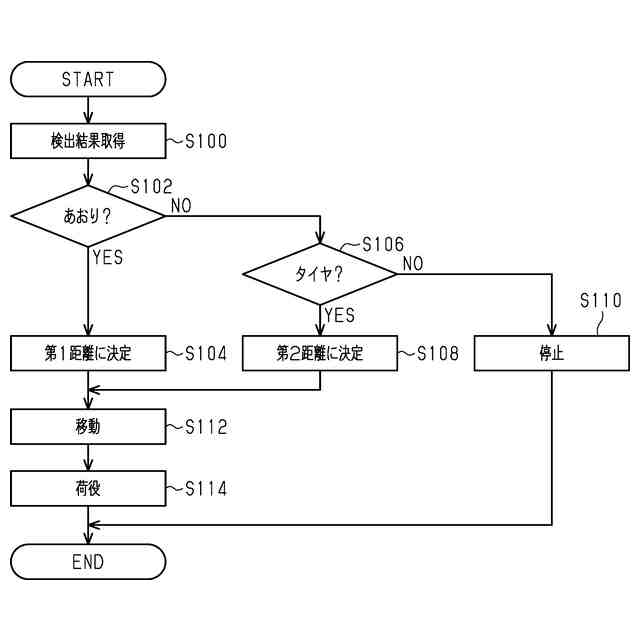
上記目的を達成するフォークリフトにおいて、前記制御装置は、前記センサの検出結果の特徴が前記トラックのあおりを示す場合、前記停止距離を第1距離に決定しつつ、前記センサの検出結果の特徴が前記トラックのタイヤを示す場合、前記停止距離を、前記第1距離とは異なる第2距離に決定してもよい。
【0007】
かかる構成によれば、センサの検出結果の特徴に応じて停止距離を異ならせることで、荷台の適切な位置に対して荷役をすることができる。
上記目的を達成するフォークリフトにおいて、前記第2距離は、前記第1距離よりは長くてもよい。かかる構成によれば、一般的なあおりとタイヤとの位置関係に応じて簡便に停止距離を決定することができる。
【0008】
上記目的を達成するフォークリフトにおいて、前記制御装置は、前記センサの検出結果の特徴が、予め定められた物体の特徴を示さない場合、フォークリフトを停止させてもよい。
【0009】
かかる構成によれば、前方に存在する物体にフォークリフトが接触することを抑制することができる。
上記目的を達成するフォークリフトにおいて、前記制御装置は、前記荷役を行う対象の前記トラックの種類を示す情報に更に基づいて、前記停止距離を決定してもよい。
【0010】
かかる構成によれば、より精度良くトラックに対応した停止距離を決定することができる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
車両
4日前
株式会社豊田自動織機
産業車両
2日前
株式会社豊田自動織機
流体機械
8日前
株式会社豊田自動織機
耐熱部材
2日前
株式会社豊田自動織機
電動圧縮機
4日前
株式会社豊田自動織機
電動圧縮機
4日前
株式会社豊田自動織機
電動圧縮機
4日前
株式会社豊田自動織機
インバータ装置
3日前
株式会社豊田自動織機
流体圧シリンダ
8日前
株式会社豊田自動織機
燃料電池ユニット
5日前
株式会社豊田自動織機
燃料電池ユニット
5日前
株式会社豊田自動織機
燃料電池モジュール
5日前
株式会社豊田自動織機
燃料電池モジュール
5日前
株式会社豊田自動織機
燃料電池モジュール
5日前
株式会社豊田自動織機
燃料電池モジュール
5日前
株式会社豊田自動織機
機能構造体の製造方法
5日前
株式会社豊田自動織機
機能構造体の製造方法
11日前
株式会社豊田自動織機
電動機、及び電動圧縮機
5日前
トヨタ自動車株式会社
液系電池
12日前
トヨタ自動車株式会社
蓄電装置の製造方法、及び蓄電装置
11日前
株式会社豊田自動織機
Na-Si合金の製造方法及びシリコンクラスレートIIを含む負極活物質の製造方法
3日前
トヨタ自動車株式会社
バイポーラ集電体、バイポーラ電極及びバイポーラ型二次電池
10日前
個人
自走手摺
1か月前
ユニパルス株式会社
吊具
3か月前
個人
海上コンテナ昇降装置
9か月前
ユニパルス株式会社
荷役装置
8か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社豊田自動織機
産業車両
9か月前
ユニパルス株式会社
リフト装置
3か月前
水戸工業株式会社
吊り具
5か月前
株式会社いうら
車椅子用昇降機
1か月前
株式会社豊田自動織機
産業車両
2日前
愛知製鋼株式会社
受け架台
22日前
株式会社大林組
安全支援システム
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ