TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025100779
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2025068603,2023176580
出願日
2025-04-18,2020-09-11
発明の名称
農作業機の作業方法
出願人
株式会社ササキコーポレーション
代理人
個人
,
個人
,
個人
主分類
A01B
35/32 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
作業後の状態を判断しながら制御するために走行機体と連携することが可能な農作業の作業方法を提供する。
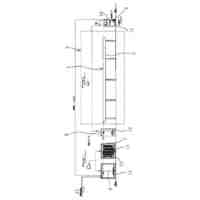
【解決手段】
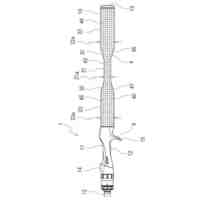
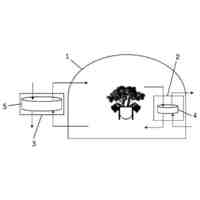
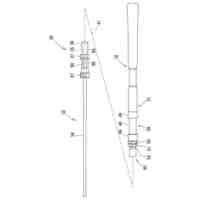
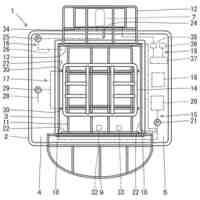
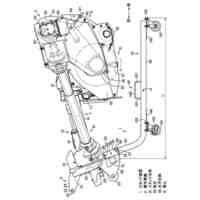
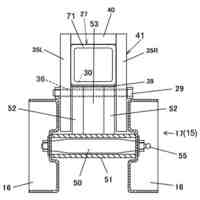
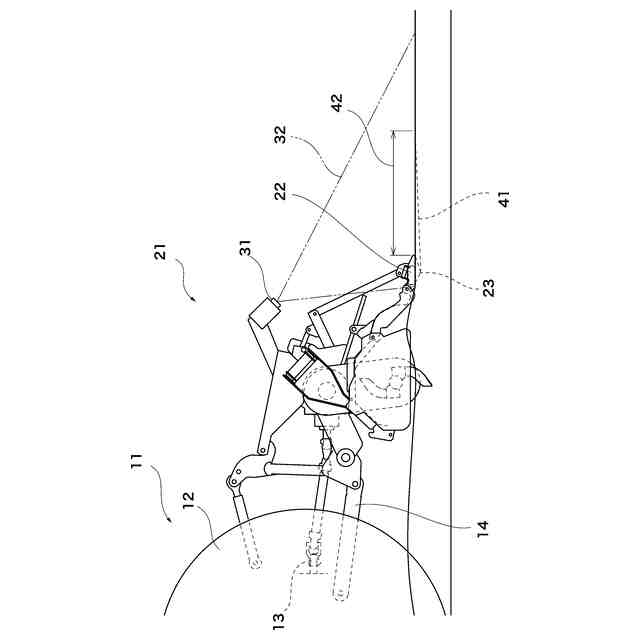
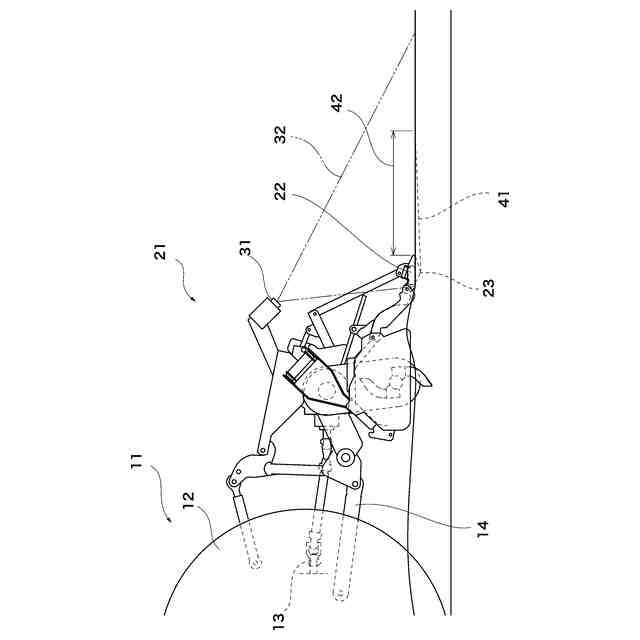
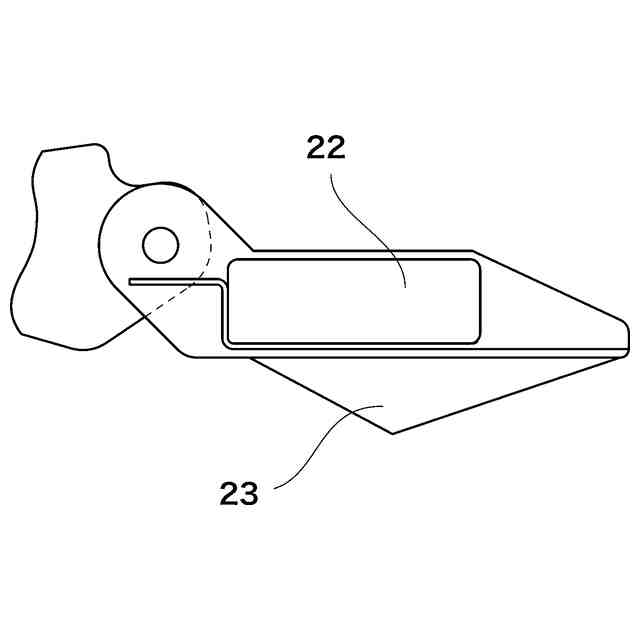
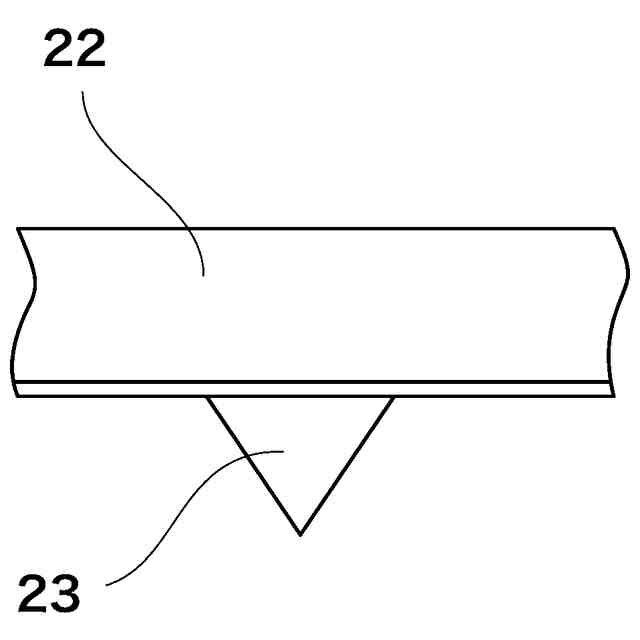
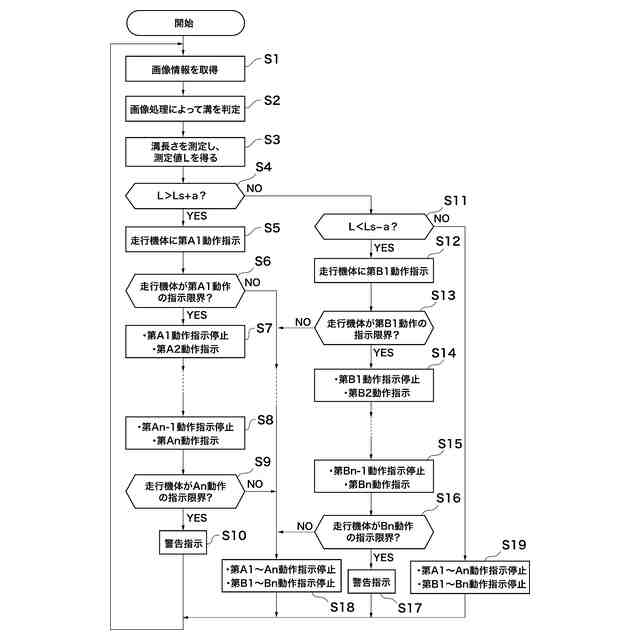
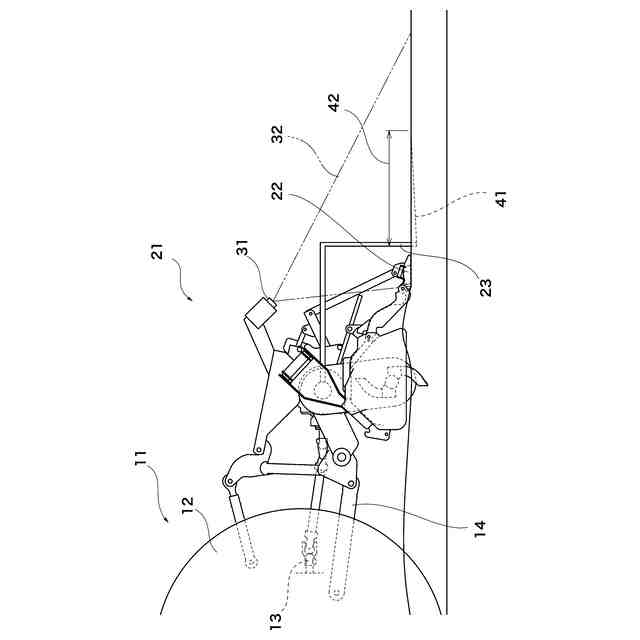
進行に伴って作業後の土壌に溝を形成する溝形成部23と、溝を撮影可能に設けた撮影装置31と、撮影装置31によって撮影した溝の形状に関する情報に基づいて、走行機体に備えた動作部を動作可能に設けた走行機体制御部と相互通信可能な制御部とを有した農作業機21であって、制御部が前記撮影装置31からの画像情報に基づいて溝の長さを測定した測定値と、予め設定した溝の溝長である設定値および予め設定した許容値を加算した合算値とを比較判断する工程と、測定値が前記合算値より大きいと判断した場合に走行機体11に第1の動作指示をする工程と、を含むことを特徴とする農作業機の作業方法。
【選択図】図1
特許請求の範囲
【請求項1】
進行に伴って作業後の土壌に溝を形成する溝形成部と、
前記溝を撮影可能に設けた撮影装置と、
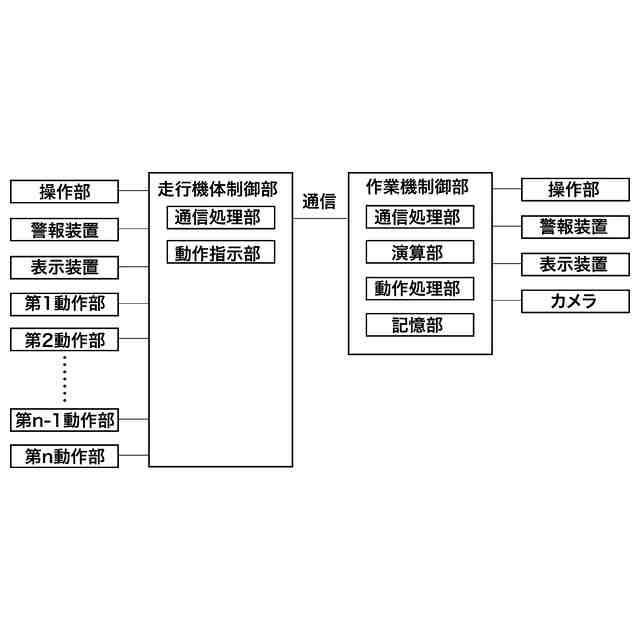
前記撮影装置によって撮影した溝の形状に関する情報に基づいて、走行機体に備えた動作部を動作可能に設けた走行機体制御部と相互通信可能な制御部とを有した農作業機であって、
前記制御部が前記撮影装置からの画像情報に基づいて溝の長さを測定した測定値と、予め設定した溝の溝長である設定値および予め設定した許容値を加算した合算値とを比較判断する工程と、
前記測定値が前記合算値より大きいと判断した場合に前記走行機体に第1の動作指示をする工程と、
を含むことを特徴とする農作業機の作業方法。
続きを表示(約 1,000 文字)
【請求項2】
前記第1の動作指示ののち前記走行機体が第1動作の指示限界であるか否かを判断する工程と、
を含むことを特徴とする請求項1に記載の農作業機の作業方法。
【請求項3】
前記走行機体が第1動作の指示限界である場合は第2の動作指示を行う工程と、
を含むことを特徴とする請求項2に記載の農作業機の作業方法。
【請求項4】
すべての前記動作部が動作限界に達すると警告指示の発信をおこなう工程と、
を含むことを特徴とする請求項3に記載の農作業機の作業方法。
【請求項5】
前記測定値が前記合算値より大きくないと判断した場合に、前記測定値と前記設定値から前記許容値を差し引いた別合算値とを比較判断する工程と、
を含むことを特徴とする請求項1に記載の農作業機の作業方法。
【請求項6】
前記測定値が前記別合算値より小さいと判断した場合に前記走行機体に別の第1の動作指示をする工程と、
を含むことを特徴とする請求項5に記載の農作業機の作業方法。
【請求項7】
前記別の第1の動作指示ののち前記走行機体が別の第1動作の指示限界である場合は別の第2の動作指示を行う工程と、
を含むことを特徴とする請求項6に記載の農作業機の作業方法。
【請求項8】
すべての前記動作部が動作限界に達すると警告指示の発信をおこなう工程と、
を含むことを特徴とする請求項7に記載の農作業機の作業方法。
【請求項9】
進行に伴って作業後の土壌に溝を形成する溝形成部と、
前記溝を撮影可能に設けた撮影装置と、
前記撮影装置によって撮影した溝の形状に関する情報に基づいて、走行機体に備えた動作部を動作可能に設けた走行機体制御部と相互通信可能な制御部とを備え、
前記制御部は前記撮影装置からの画像情報に基づいて溝の長さを測定した測定値と、予め設定した溝の溝長である設定値および予め設定した許容値を加算した合算値とを比較判断し、
前記測定値が前記合算値より大きいと判断した場合に前記走行機体に第1の動作指示をする、
ことを特徴とする農作業機。
【請求項10】
前記制御部は前記第1の動作指示ののち前記走行機体が第1動作の指示限界であるか否かを判断する、
ことを特徴とする請求項9に記載の農作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、農作業機の作業方法に係る。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
走行機体に装着して土壌を耕耘あるいは砕土可能な農作業機を、適正な耕耘状態にするために走行機体が有する昇降装置を動作させる機構について、特許文献1の「耕耘機の制御装置」、及び、特許文献2の「作業機の自動制御システム」で提唱されている。
特許文献1「耕耘機の制御装置」には、ロータリ耕耘装置が有する後カバーの回動角度を対地高さとして検出するカバーセンサで得られた検出情報を基にして、走行機体が備える昇降装置を動作させる機構が記載されている。
【0003】
特許文献2「作業機の自動制御システム」に記載の機構は、走行機体及びこれに装着される作業機を横側面及び前後から望める他の場所にカメラを設置し、このカメラで得られた画像を基に演算計測することによって、走行機体に装着される作業機を昇降させるものである。
【先行技術文献】
【特許文献】
【0004】
特開平8―214602号公報
特開2007-61042号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
元来、土壌を耕耘あるいは砕土する作業機は、作業を行う圃場の状態に合わせて、適宜、走行機体を操作することが望ましい。走行機体の操作とは、作業機が装着される昇降装置の昇降動作のみならず、走行速度、作業機側への動力取り出し軸であるPTO回転数等、多岐にわたる。
【0006】
特許文献1「耕運機の制御装置」に記載の機構は、「制御装置18には、強制昇降制御手段18Dの制御作動によりロータリ耕耘装置3を耕深設定位置から上昇限界位置まで強制的に上昇させる場合におけるロータリ耕耘装置3の上昇速度を、図3に示すようにカバーセンサS3からの検出情報に基づいて調節する上昇速度制御手段18Eが制御プログラムとして備えられている。」ものであって(特許文献1[0024])、カバーセンサによって走行機体の昇降装置を動作させるのみなので、耕耘後及び砕土後の土壌状態を考慮した制御はされていなかった。
【0007】
特許文献2「作業機の自動制御システム」に記載の機構は、「上記制御作動と同時にトラクタ本機1の車輪沈下量や機体の前後ピッチング姿勢が、撮影した画像の解析によって演算計測され、取得されたこれらの情報が上記自動耕深制御を実行する上での制御量や制御速度を補償する情報として制御装置17に伝送され、応答性の向上やハンチング防止などに活用される。」(特許文献2[0030])、「耕耘装置2を後方から撮影した画像(図5参照)を解析して、耕耘装置2の左右方向での絶対傾斜角度や地表面GLに対する相対傾斜角度、などが演算計測される。」(特許文献2[0032])、「撮像装置41には、撮影した画像の解析を行う解析装置42、画像解析によって取得された情報を無線で送信する送信装置43を備えた解析ユニット44が備えられている。他方、掘削機Bの走行機体31にはこの無線情報を受信する受信装置45が備えられて前記制御装置38に接続されており、撮影された画像の解析によってバケット37における掘削点xの位置が演算計測され、得られた情報に基づいて所望深さの掘削作業や、水平掘削、法面の傾斜掘削、などが行われる。」とされる(特許文献2[0040])。
【0008】
特許文献2に記載の機構は、走行機体及びこれに装着される作業機を横側面及び前後から望める他の場所にカメラを設置し、このカメラで得られた画像を基に演算計測することによって、走行機体に装着される作業機を昇降させるものである。
特許文献2に記載の機構は、カメラを用いて、特許文献1より、さらに細やかな制御を可能にしているものの、特許文献1と同様に、耕耘後及び砕土後の土壌状態は考慮されていない。
本発明は上記課題に着眼してなされたものであり、作業後の状態を判断しながら制御するために走行機体と連携することが可能な農作業機の作業方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明は、
進行に伴って作業後の土壌に溝を形成する溝形成部と、
前記溝を撮影可能に設けた撮影装置と、
前記撮影装置によって撮影した溝の形状に関する情報に基づいて、走行機体に備えた動作部を動作可能に設けた走行機体制御部と相互通信可能な制御部とを有した農作業機であって、
前記制御部が前記撮影装置からの画像情報に基づいて溝の長さを測定した測定値と、予め設定した溝の溝長である設定値および予め設定した許容値を加算した合算値とを比較判断する工程と、
前記測定値が前記合算値より大きいと判断した場合に前記走行機体に第1の動作指示をする工程と、
を含むことを特徴とする農作業機の作業方法、
に係る。
【0010】
この発明は、更に、
前記第1の動作指示ののち前記走行機体が第1動作の指示限界であるか否かを判断する工程と、
を含むことを特徴とする農作業機の作業方法、
に係る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
苗キャップ
1か月前
個人
播種機
9日前
個人
尿処理材
24日前
株式会社アテックス
草刈機
1か月前
有限会社マイク
囲い罠
2日前
個人
水耕栽培システム
1か月前
井関農機株式会社
コンバイン
2日前
株式会社シマノ
釣り具
2日前
個人
室内栽培システム
5日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
移植機
9日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
圃場管理装置
24日前
株式会社西部技研
空調システム
29日前
井関農機株式会社
圃場管理装置
10日前
井関農機株式会社
圃場管理装置
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
9日前
株式会社シマノ
釣竿
26日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
16日前
株式会社ダイイチ
海苔網の酸処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
ダイハツ工業株式会社
草刈り機
1か月前
株式会社山田鉄工
海苔網処理船
5日前
個人
ペット用歯磨き用具セット
1か月前
合同会社小林知財研鑽処
液体空気散布船
1か月前
松山株式会社
スタンド装置
9日前
大栄工業株式会社
誘引剤収容容器
3日前
関東農機株式会社
ロータリ管理機
1か月前
三菱マヒンドラ農機株式会社
耕耘作業機
26日前
井関農機株式会社
作業車両
24日前
株式会社シマノ
釣糸ガイド及び釣竿
4日前
株式会社クボタ
収穫機
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ