TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025100311
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2024113657
出願日
2024-07-16
発明の名称
マルチタスクに基づいて道路の特徴を抽出するためのディープラーニングモデルを学習する方法およびそれを用いたコンピューティング装置
出願人
株式会社 オートノマス エイ2ゼット
,
AUTONOMOUS A2Z CO., LTD.
代理人
弁理士法人浅村特許事務所
主分類
G06V
10/80 20220101AFI20250626BHJP(計算;計数)
要約
【課題】マルチタスクに基づいて道路の特徴を抽出するためのディープラーニングモデルを学習する方法を提供する。
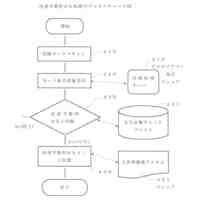
【解決手段】方法は、学習のための初期値を設定することと、各学習タスクのそれぞれに対して一つのエポック(epoch)を完了するために必要な学習ステップ数を決定することと、各学習ステップ数を参照して、全エポックに含まれる総ステップ数を決定することと、学習タスクの現在ステップ数の総和と総ステップ数とを比較し、各学習タスクの現在ステップ数の総和が総ステップ数未満であれば、学習タスクのそれぞれに対する選択確率初期値を参照して、各学習タスクの中から学習を行う特定の学習タスクをランダムに選択することと、特定の学習タスクレイヤーで出力された予測結果と、前記特定の学習タスクに対応するGround Truthを参照して、特定のタスクに対するロスを算出することと、を含む。
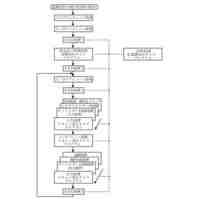
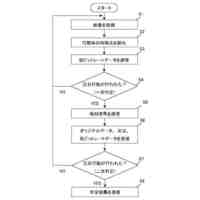
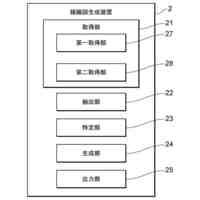
【選択図】図2
特許請求の範囲
【請求項1】
マルチタスクに基づいて道路の特徴を抽出するためのディープラーニングモデルを学習する方法において、
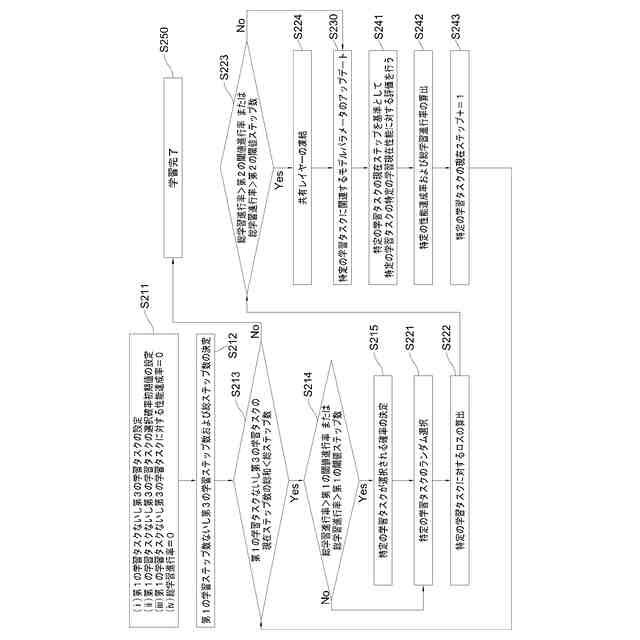
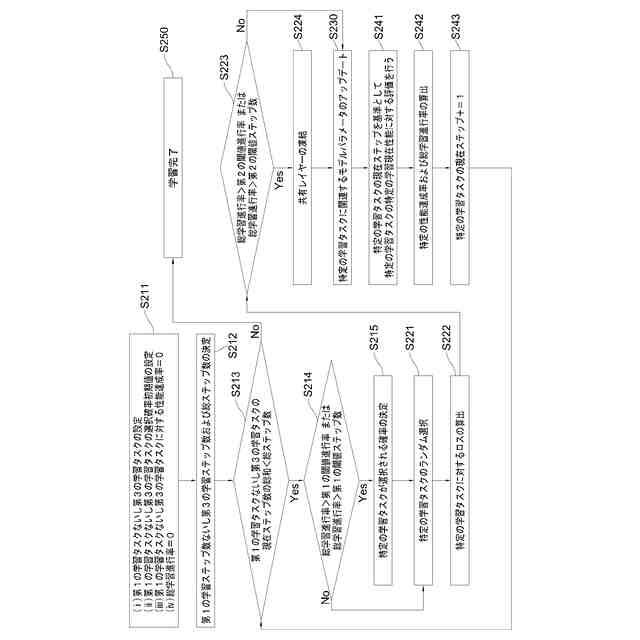
(a)コンピューティング装置が、道路上の車線の推定のための第1の学習タスク、前記道路に関連する構造物の線の推定のための第2の学習タスク、前記道路の前記車線および前記構造物に対するセマンティックセグメンテーションのための第3の学習タスクを設定し、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する選択確率初期値を設定し、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対して1つのエポック(epoch)を完了するために必要な第1の学習ステップ数ないし第3の学習ステップ数を設定し、前記第1の学習ステップ数ないし前記第3の学習ステップ数を参照して、全エポックに含まれる総ステップ数を決定するステップ;
(b)総学習進行率が第1の閾値進行率以下であるか、または第1の閾値ステップ数以下であると判断されると、前記コンピューティング装置は、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する前記選択確率初期値を参照して、前記第1の学習タスクないし前記第3の学習タスクの中から学習を行う特定の学習タスクをランダムに選択し、前記特定の学習タスクに対するロスを算出するステップ;および
(c)前記コンピューティング装置が、前記特定の学習タスクのロス値を参照して、前記特定の学習タスクに関連するモデルパラメータをアップデートするステップ;
を含む方法。
続きを表示(約 3,500 文字)
【請求項2】
前記(b)ステップにおいて、
前記総学習進行率が第1の閾値進行率超過であるか、または第1の閾値ステップ数超過であると判断されると、前記コンピューティング装置は、前記特定の学習タスクの特定の学習最高性能に対する前記特定の学習現在性能の比率を参照して、前記特定の学習タスクに対する特定の性能達成率を算出し、前記特定の性能達成率を参照して、前記特定の学習タスクに対応する特定の学習重みを算出し、前記特定の学習重みおよび前記特定の学習タスクのステップ数を参照して、特定の学習選択確率調整値を算出し、前記第1の学習タスクないし前記第3の学習タスクの中から前記特定の学習タスクが選択される確率を前記特定の学習選択確率調整値として決定することを特徴とする、請求項1に記載の方法。
【請求項3】
前記(b)ステップにおいて、
前記特定の学習重みは、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する第1の性能達成率ないし第3の性能達成率の和に対する前記特定の学習重みの比率を1から差し引いた値で示し、前記特定の学習選択確率調整値は、前記第1の学習ステップ数ないし前記第3の学習ステップ数のすべてを合算した値に対する前記特定の学習タスクの特定の学習ステップ数の比率に前記特定の学習重みを乗算した値で示すことを特徴とする、請求項2に記載の方法。
【請求項4】
(d)前記モデルパラメータがアップデートされると、前記コンピューティング装置は、前記特定の学習タスクの特定の現在ステップを基準として、前記特定の学習タスクの特定の学習現在性能に対する評価を行い、前記特定の学習タスクの特定の学習最高性能に対する前記特定の学習現在性能の比率を参照して、前記特定の学習タスクに対する特定の性能達成率を算出し、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する第1の学習性能達成率ないし第3の学習性能達成率(前記第1の学習性能達成率ないし前記第3の学習性能達成率のいずれか一つは前記特定の性能達成率である)を参照して、総学習進行率を算出し、前記特定の学習タスクの前記特定の現在ステップに1を加えた状態の第1の現在ステップ数ないし第3の現在ステップ数の和が前記総ステップ数未満であると、前記特定の現在ステップのステップ数に1を加えた状態で、前記(b)ステップ以降を再度行うように支援するステップ;
をさらに含むことを特徴とする、請求項1に記載の方法。
【請求項5】
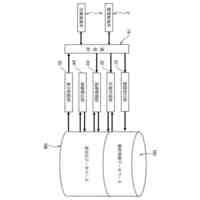
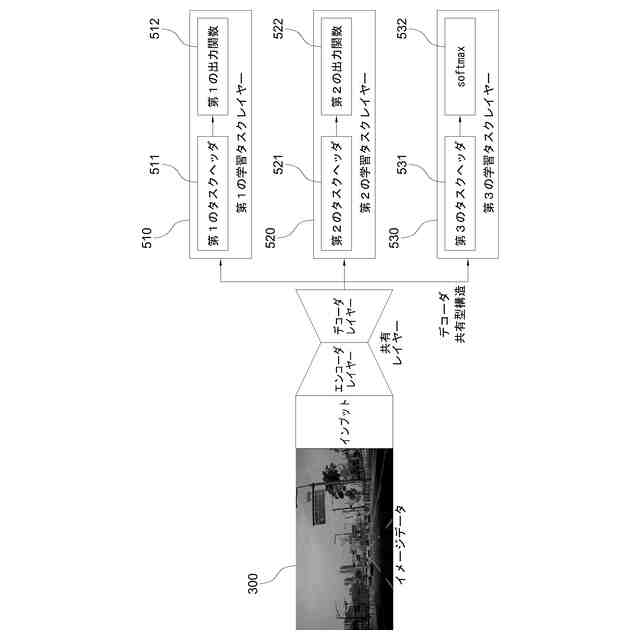
前記ディープラーニングモデルは、共有レイヤーとして、自律走行車両に搭載されている少なくとも1つのカメラを通じて取得されたイメージデータが入力されるエンコーダレイヤーおよび前記エンコーダレイヤーから出力されたエンコーダ出力データが入力されるデコーダレイヤーを含み、個別レイヤーとして、前記デコーダレイヤーから出力されたデコーダ出力データが入力される前記第1の学習タスクに対応する第1のタスクヘッダおよび前記第1のタスクヘッダから出力された第1のタスクヘッダ出力データに出力関数演算を適用するための第1の出力関数を含む第1の学習タスクレイヤー、前記デコーダレイヤーから出力された前記デコーダ出力データが入力される前記第2の学習タスクに対応する第2のタスクヘッダおよび前記第2のタスクヘッダから出力された第2のタスクヘッダ出力データに出力関数演算を適用するための第2の出力関数を含む第2の学習タスクレイヤー、ならびに前記デコーダレイヤーから出力された前記デコーダ出力データが入力される前記第3の学習タスクに対応する第3のタスクヘッダおよび前記第3のタスクヘッダから出力された第3のタスクヘッダ出力データに分類演算を適用するための特定のソフトマックス(Softmax)関数を含む第3の学習タスクレイヤーを含むことを特徴とする、請求項1に記載の方法。
【請求項6】
前記(c)ステップにおいて、
前記総学習進行率が第2の閾値進行率以下であるか、または第2の閾値ステップ数以下であると判断されると、前記コンピューティング装置は、前記ディープラーニングモデルに含まれる前記共有レイヤーおよび前記個別レイヤーを学習させ、前記総学習進行率が前記第2の閾値進行率を超過するか、または前記第2の閾値ステップ数を超過すると判断されると、前記共有レイヤーを凍結して学習を中止させた状態で、前記個別レイヤーのうち前記特定の学習タスクに関連する特定の個別レイヤーの特定のモデルパラメータをアップデートすることを特徴とする、請求項5に記載の方法。
【請求項7】
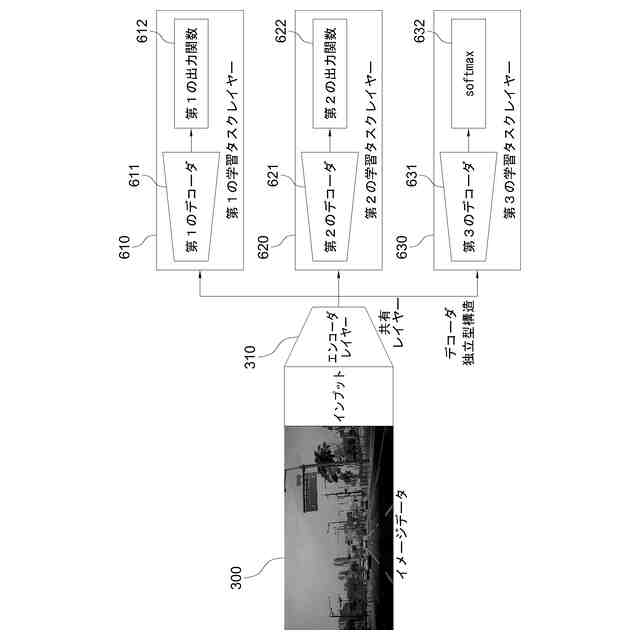
前記ディープラーニングモデルは、共有レイヤーとして、自律走行車両に搭載されている少なくとも1つのカメラを通じて取得されたイメージデータが入力されるエンコーダレイヤーを含み、個別レイヤーとして、前記第1の学習タスクに対応し、前記エンコーダレイヤーから出力されたエンコーダ出力データが入力される第1のデコーダおよび前記第1のデコーダから出力された第1のデコーダ出力データに出力関数演算を適用するための第1の出力関数を含む第1の学習タスクレイヤー、前記第2の学習タスクに対応し、前記エンコーダレイヤーから出力された前記エンコーダ出力データが入力される第2のデコーダおよび前記第2のデコーダから出力された第2のデコーダ出力データに出力関数演算を適用するための第2の出力関数を含む第2の学習タスクレイヤー、ならびに前記第3の学習タスクに対応し、前記エンコーダレイヤーから出力された前記エンコーダ出力データが入力される第3のデコーダおよび前記第3のデコーダから出力された第3のデコーダ出力データに分類演算を適用するための特定のソフトマックス関数を含む第3の学習タスクレイヤーを含むことを特徴とする、請求項1に記載の方法。
【請求項8】
前記(c)ステップにおいて、
前記総学習進行率が第2の閾値進行率以下であるか、または第2の閾値ステップ数以下であると判断されると、前記コンピューティング装置は、前記ディープラーニングモデルに含まれる前記共有レイヤーおよび前記個別レイヤーを学習させ、前記総学習進行率が前記第2の閾値進行率を超過するか、または前記第2の閾値ステップ数を超過すると判断されると、前記共有レイヤーを凍結して学習を中止させた状態で、前記個別レイヤーのうち前記特定の学習タスクに関連する特定の個別レイヤーの特定のモデルパラメータをアップデートすることを特徴とする、請求項7に記載の方法。
【請求項9】
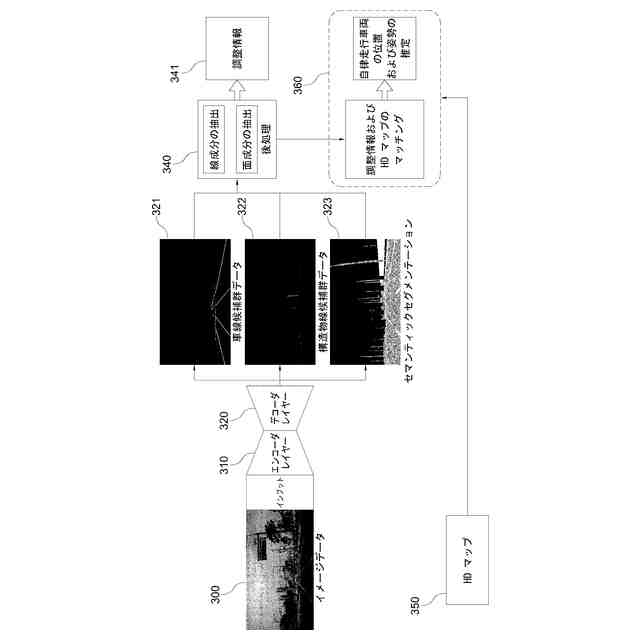
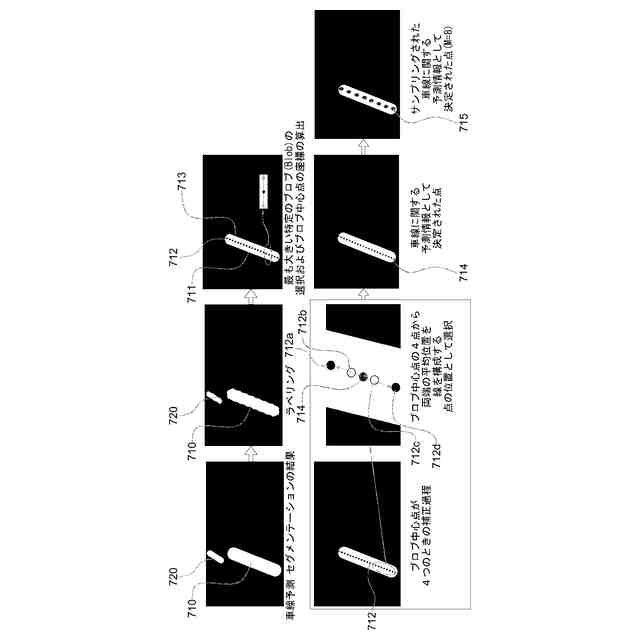
(e)前記ディープラーニングモデルから出力された前記第1の学習タスクに対応する車線候補群データが入力されると、前記コンピューティング装置は、前記車線候補群データに対してチャンネルごとにラベリングし、最も大きい特定のラベルブロブ(bLob)を選択し、残りのラベルブロブは除去し、前記特定のラベルブロブに対してブロブ中心点の座標を求めた後、前記ブロブ中心点の座標に対して移動平均フィルター(Moving average filter)を適用して、前記車線に関する予測情報を決定するステップ;および
(f)前記コンピューティング装置は、前記車線に関する予測情報およびHDマップ(map)を参照してマッチングを行い、それによって自律走行車両の位置および姿勢を推定するステップ;
をさらに含む、請求項1に記載の方法。
【請求項10】
前記(e)ステップの後に、
前記車線に関する予測情報および前記セマンティックセグメンテーションに関する情報が取得されると、前記コンピューティング装置は、前記車線に関する予測情報と前記セマンティックセグメンテーションに関する情報との間で重なり合う特定の部分を、特定の車線の左側境界線および右側境界線として区別し、前記左側境界線と前記右側境界線との間の重なり合い中心点の座標を露出車線の中心点として決定し、前記露出車線の前記左側境界線および前記右側境界線を参照して、非露出車線に対する領域を復元し、前記車線に関する調整情報を決定するステップをさらに含み、
前記(f)ステップにおいて、前記コンピューティング装置は、前記車線に関する調整情報および前記HDマップを参照してマッチングを行い、それによって前記自律走行車両の位置および姿勢を推定することを特徴とする、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、マルチタスクに基づいて道路の特徴を抽出するためのディープラーニングモデルを学習する方法およびそれを用いたコンピューティング装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自律走行車両が走行する際、現在の位置を推定する技術は非常に重要である。
【0003】
しかし、既存の自律走行車両が位置を推定する技術は、単に車線検出情報を利用してHDマップをマッチングする方法であり、単に映像処理のエッジ(Edge)に基づいて車線検出モデルを適用するだけであるため、画質の変化、影、および車線の隠れや破損などのノイズによって車線推定性能に限界があり、HDマップと車線検出情報とをマッチングする際、車線のみを考慮するため、誤った車線推定による性能低下が非常に深刻である。
【0004】
したがって、本発明の発明者は、道路に車線などがないか、または車線が遮蔽された位置でHDマップマッチングを行うための道路特徴推定モデルを提案しようとする。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上述の問題点を解決することをその目的とする。
【0006】
本発明は、道路に車線などがないか、または車線が遮蔽された位置でHDマップマッチングを行うことを他の目的とする。
【0007】
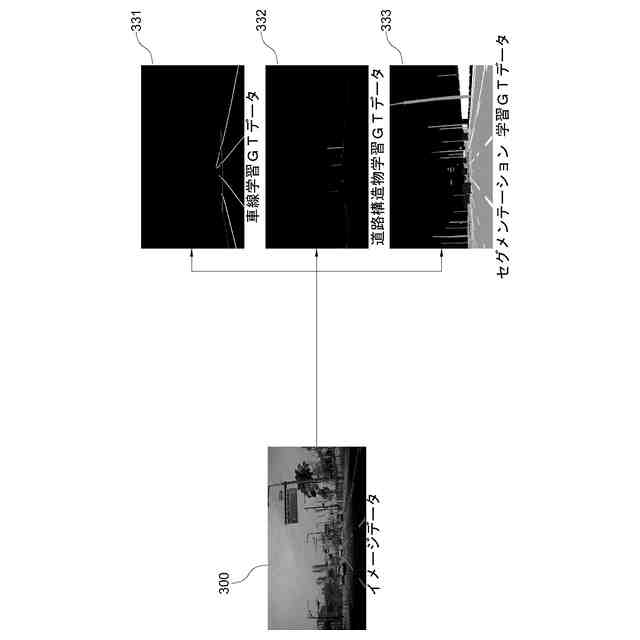
本発明は、道路上の車線の推定のための第1の学習タスク、前記道路に関連する構造物の線の推定のための第2の学習タスク、ならびに前記道路の前記車線および前記構造物に対するセマンティックセグメンテーションのための第3の学習タスクに対する重複演算を最小化するためのマルチタスクモデル構造を適用することをさらに他の目的とする。
【0008】
本発明は、学習データの構築コストを最小化するための異種データに基づくマルチタスク学習方法を提案することをさらに他の目的とする。
【0009】
本発明は、画像ノイズに強く、後処理を簡素化できる道路特徴推定モデルを提案することをさらに他の目的とする。
【課題を解決するための手段】
【0010】
本発明の一実施例によると、マルチタスクに基づいて道路の特徴を抽出するためのディープラーニングモデルを学習する方法において、(a)コンピューティング装置が、道路上の車線の推定のための第1の学習タスク、前記道路に関連する構造物の線の推定のための第2の学習タスク、前記道路の前記車線および前記構造物に対するセマンティックセグメンテーションのための第3の学習タスクを設定し、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する選択確率初期値を設定し、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対して1つのエポック(epoch)を完了するために必要な第1の学習ステップ数ないし第3の学習ステップ数を設定し、前記第1の学習ステップ数ないし前記第3の学習ステップ数を参照して、全エポックに含まれる総ステップ数を決定するステップ;(b)総学習進行率が第1の閾値進行率以下であるか、または第1の閾値ステップ数以下であると判断されると、前記コンピューティング装置は、前記第1の学習タスクないし前記第3の学習タスクのそれぞれに対する前記選択確率初期値を参照して、前記第1の学習タスクないし前記第3の学習タスクの中から学習を行う特定の学習タスクをランダムに選択し、前記特定の学習タスクに対するロスを算出するステップ;および(c)前記コンピューティング装置が、前記特定の学習タスクのロス値を参照して、前記特定の学習タスクに関連するモデルパラメータをアップデートするステップ;を含む方法が提供される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
22日前
個人
物品給付年金
1か月前
個人
情報処理装置
22日前
個人
政治のAI化
1か月前
個人
情報処理装置
18日前
個人
記入設定プラグイン
10日前
個人
プラグインホームページ
1か月前
個人
不動産売買システム
2日前
個人
情報入力装置
22日前
個人
物価スライド機能付生命保険
22日前
キヤノン株式会社
通信装置
1か月前
個人
マイホーム非電子入札システム
22日前
キヤノン株式会社
画像処理装置
1か月前
株式会社BONNOU
管理装置
15日前
個人
全アルゴリズム対応型プログラム
1か月前
大同特殊鋼株式会社
輝線検出方法
1か月前
株式会社東芝
電子機器
3日前
株式会社ワコム
電子消去具
2日前
サクサ株式会社
カードの制動構造
24日前
個人
決済手数料0%のクレジットカード
25日前
ホシデン株式会社
タッチ入力装置
2日前
シャープ株式会社
電子機器
1か月前
株式会社ライト
情報処理装置
15日前
村田機械株式会社
割当補助システム
28日前
パテントフレア株式会社
交差型バーコード
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
ミサワホーム株式会社
宅配ロッカー
1か月前
株式会社アジラ
データ転送システム
1か月前
トヨタ自動車株式会社
欠け検査装置
1か月前
個人
パターン抽出方法及び通信多重化方法
1日前
トヨタ自動車株式会社
情報処理装置
28日前
株式会社CBE-A
情報処理システム
1日前
オベック実業株式会社
端末用スタンド
1か月前
住友重機械工業株式会社
力覚伝達装置
17日前
大王製紙株式会社
RFIDタグ
1日前
Sansan株式会社
組織図生成装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ