TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097561
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023213804
出願日
2023-12-19
発明の名称
機械学習装置および推論装置
出願人
株式会社JVCケンウッド
代理人
個人
主分類
G06T
7/00 20170101AFI20250624BHJP(計算;計数)
要約
【課題】撮像された画像からより正確な動きベクトルを推論できる技術を提供する。
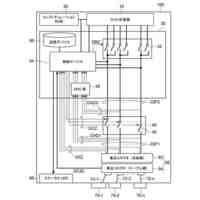
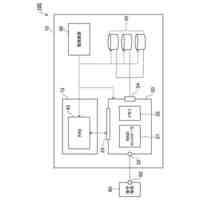
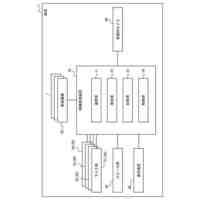
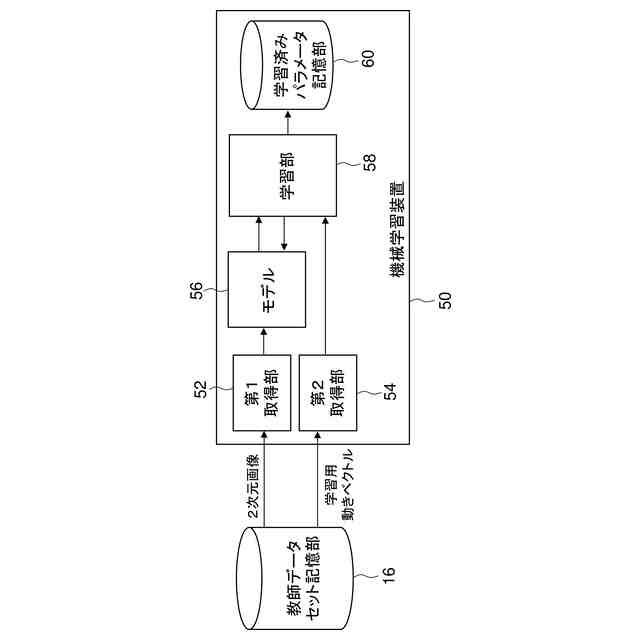
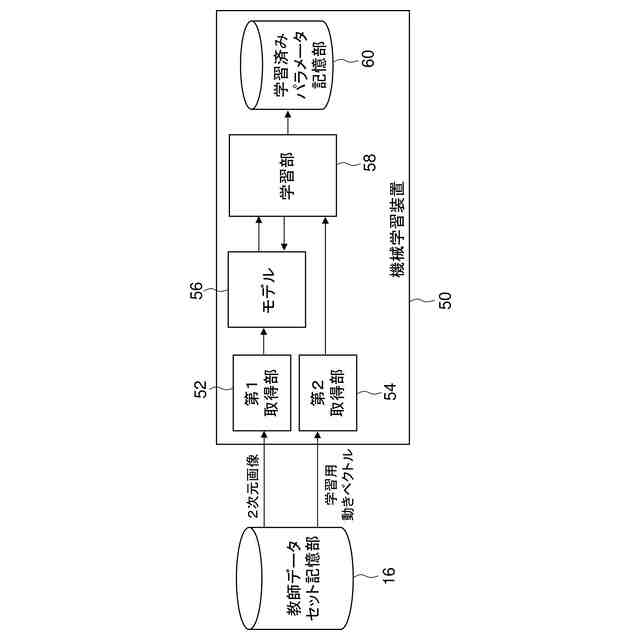
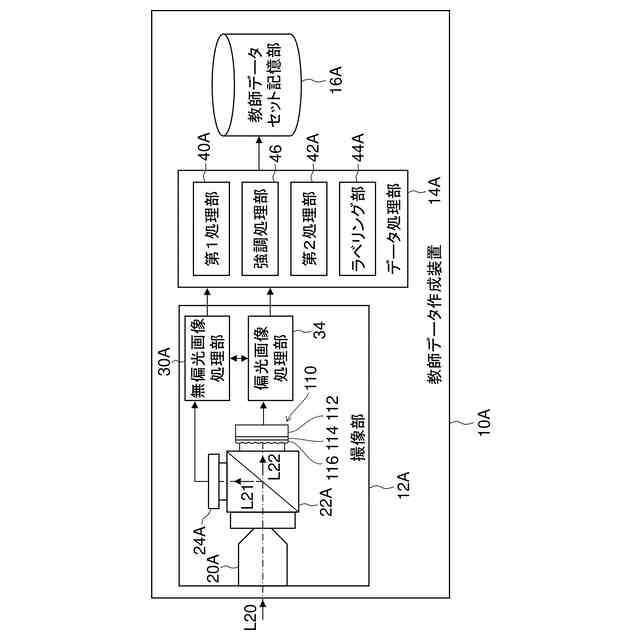
【解決手段】第1取得部52は、無偏光画像センサで撮像された被写体の2フレームの無偏光画像を取得する。第2取得部54は、偏光画像センサで撮像された被写体の2フレームの偏光画像に基づいて導出された3次元の学習用動きベクトルを取得する。学習部58は、取得された2フレームの無偏光画像を入力とし、取得された学習用動きベクトルを正解として、モデル56を機械学習する。
【選択図】図4
特許請求の範囲
【請求項1】
無偏光画像センサで撮像された被写体の2フレームの無偏光画像を取得する第1取得部と、
偏光画像センサで撮像された前記被写体の2フレームの偏光画像に基づいて導出された3次元の学習用動きベクトルを取得する第2取得部と、
取得された前記2フレームの無偏光画像を入力とし、取得された前記学習用動きベクトルを正解として、モデルを機械学習する学習部と、
を備える機械学習装置。
続きを表示(約 680 文字)
【請求項2】
前記無偏光画像と前記偏光画像は、同一光軸で撮像されている、
請求項1に記載の機械学習装置。
【請求項3】
前記2フレームの無偏光画像から導出された動きベクトルは、動きベクトルの異常に関する所定条件を満たし、
前記2フレームの偏光画像は、前記2フレームの無偏光画像と同等のタイミングで撮像されている、
請求項1または2に記載の機械学習装置。
【請求項4】
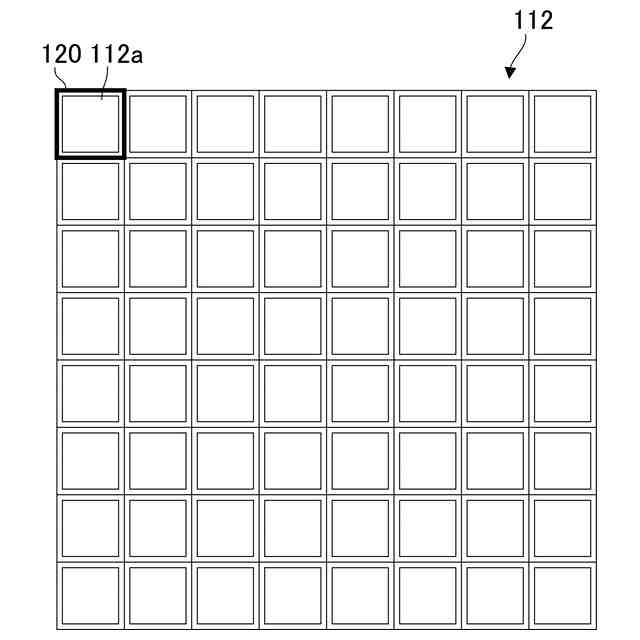
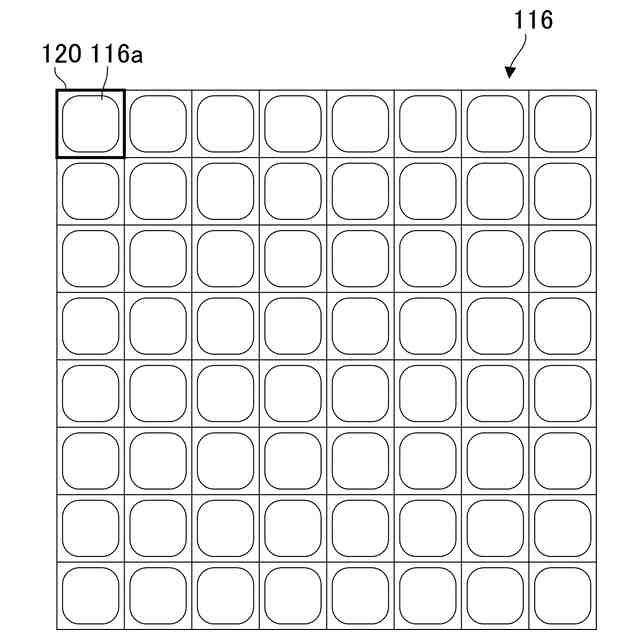
前記偏光画像センサは、1フレームの偏光画像として、偏光方向の異なる複数の偏光撮像画像を撮像し、
1フレームの偏光画像ごとに、前記偏光画像の前記複数の偏光撮像画像の画素ごとに輝度値が平均された平均偏光画像が生成され、前記偏光画像の前記複数の偏光撮像画像に基づいて直線偏光度画像が生成され、前記平均偏光画像と前記直線偏光度画像とが合成された合成偏光画像が生成され、
前記学習用動きベクトルは、2フレームの合成偏光画像に基づいて導出されている、
請求項1または2に記載の機械学習装置。
【請求項5】
無偏光画像センサで撮像された2フレームの無偏光画像を取得する取得部と、
学習済みモデルを用いて、取得された前記2フレームの無偏光画像に基づいて3次元の動きベクトルを推論する推論部と、
を備え、
前記学習済みモデルは、被写体の2フレームの学習用無偏光画像と、前記被写体の2フレームの偏光画像に基づいて導出された3次元の学習用動きベクトルと、に基づいて機械学習されている、推論装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械学習装置および推論装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、カメラで撮影された画像を用いた各種技術の開発が行われている。特許文献1は、RGBカメラとToF(Time of Flight)センサを備える人検出システムを開示する。
【先行技術文献】
【特許文献】
【0003】
特開2021-76948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
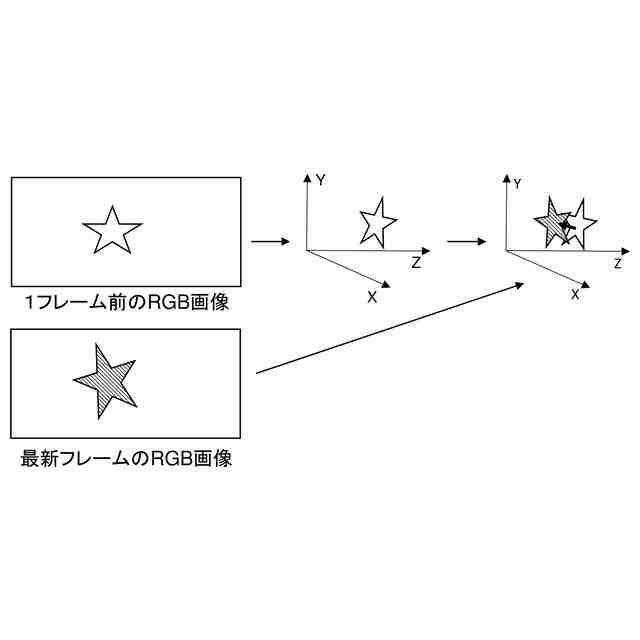
ロボットなどの移動体の自動走行技術に用いられるSLAM(Simultaneous Localization and Mapping)が知られている。SLAM技術の一つとして、ビジュアルSLAM(以下、VSLAMと呼ぶ)という技術がある。VSLAMでは、RGBセンサまたはモノクロセンサで撮像した2フレームの画像間の動きベクトルを定期的に取得し、その動きベクトルをもとに定期的に自己位置を推定するとともにマップを作成する。VSLAMは、比較的低コストのRGBセンサまたはモノクロセンサを用いて実現できるため、製品コストを抑制しやすい。
【0005】
しかし、一般的にVSLAMでは、撮像された被写体の大部分が壁であり、その壁の特徴点が少ない場合などには、誤った動きベクトルを取得しやすく、自己位置を見失うロストが発生しやすくなる。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、撮像された画像からより正確な動きベクトルを推論できる技術を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある態様の機械学習装置は、無偏光画像センサで撮像された被写体の2フレームの無偏光画像を取得する第1取得部と、偏光画像センサで撮像された被写体の2フレームの偏光画像に基づいて導出された3次元の学習用動きベクトルを取得する第2取得部と、取得された2フレームの無偏光画像を入力とし、取得された学習用動きベクトルを正解として、モデルを機械学習する学習部と、を備える。
【0008】
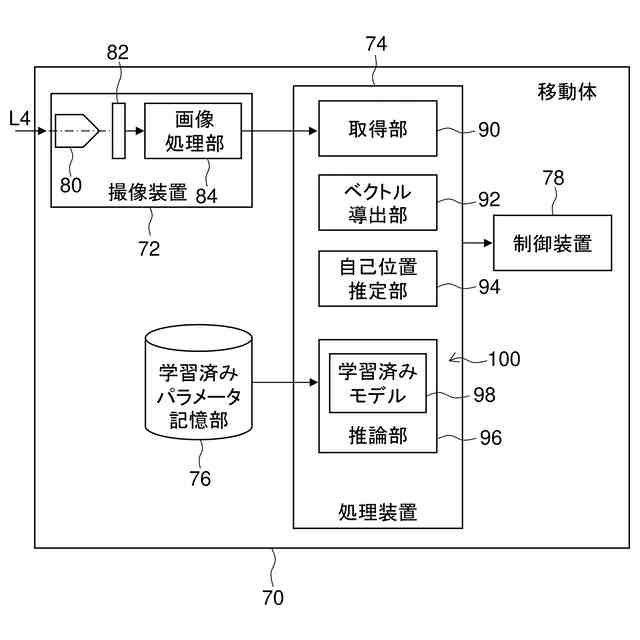
本発明の別の態様は、推論装置である。この装置は、無偏光画像センサで撮像された2フレームの無偏光画像を取得する取得部と、学習済みモデルを用いて、取得された2フレームの無偏光画像に基づいて3次元の動きベクトルを推論する推論部と、を備える。学習済みモデルは、被写体の2フレームの学習用無偏光画像と、被写体の2フレームの偏光画像に基づいて導出された3次元の学習用動きベクトルと、に基づいて機械学習されている。
【0009】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0010】
本発明によれば、撮像された画像からより正確な動きベクトルを推論できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
記入設定プラグイン
12日前
個人
不動産売買システム
4日前
株式会社BONNOU
管理装置
17日前
ホシデン株式会社
タッチ入力装置
4日前
株式会社東芝
電子機器
5日前
株式会社ワコム
電子消去具
4日前
個人
パターン抽出方法及び通信多重化方法
3日前
株式会社ライト
情報処理装置
17日前
株式会社CBE-A
情報処理システム
3日前
大王製紙株式会社
RFIDタグ
3日前
個人
システム、データおよびプログラム
13日前
株式会社半導体エネルギー研究所
検索支援方法
17日前
株式会社半導体エネルギー研究所
会計システム
10日前
キヤノン株式会社
印刷システム
3日前
株式会社デンソーウェーブ
情報読取装置
10日前
株式会社共同経営
農企業用の経営診断システム
12日前
日本電気株式会社
処理装置
5日前
株式会社東芝
RAID保守システム
3日前
株式会社デンソー
データ処理装置
11日前
ルネサスエレクトロニクス株式会社
半導体装置
10日前
日本電気株式会社
回路装置及び制御方法
13日前
株式会社東芝
RAID保守システム
3日前
株式会社デンソー
電子制御装置
17日前
理想科学工業株式会社
封入封緘装置
3日前
テイ・エス テック株式会社
車両システム
17日前
株式会社ノーリツ
中継装置
13日前
トヨタ自動車株式会社
情報処理装置
11日前
株式会社デンソーウェーブ
作業管理システム
4日前
株式会社アイシン
情報提供システム
5日前
トヨタ自動車株式会社
制御装置
10日前
株式会社アイシン
情報提供システム
5日前
トヨタ自動車株式会社
制御装置
10日前
株式会社NTTドコモ
触覚インターフェース
12日前
株式会社タレントナビゲーター
求人求職支援システム
3日前
トヨタ自動車株式会社
情報処理システム
5日前
株式会社JVCケンウッド
画像認識支援装置及び方法
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ