TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095186
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211030
出願日
2023-12-14
発明の名称
操作支援方法、操作支援システム、および、プログラム
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
A01B
69/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】オペレータの操作に応じて自動で旋回走行を行う作業車両における操作支援を適切に行うことができる技術を提供する。
【解決手段】例示的な操作支援方法は、オペレータの操作に応じて自動で旋回走行を行う作業車両の操作支援方法であって、前記作業車両の進行方向前方側に前記旋回走行に関わる指標を表示させる。
【選択図】図10
特許請求の範囲
【請求項1】
オペレータの操作に応じて自動で旋回走行を行う作業車両の操作支援方法であって、
前記作業車両の進行方向前方側に前記旋回走行に関わる指標を表示させる、操作支援方法。
続きを表示(約 900 文字)
【請求項2】
前記指標は、前記オペレータに前記旋回走行の開始位置を判断可能とする指標である、請求項1に記載の操作支援方法。
【請求項3】
前記指標は、前記作業車両が現在位置から前記旋回走行を開始した場合に、前記作業車両が前記進行方向前方側において到達する最大距離、或いは、前記最大距離に所定距離を加算した距離を示す、請求項1に記載の操作支援方法。
【請求項4】
前記指標の表示位置は、前記作業車両に関する寸法情報に基づき設定される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項5】
前記指標の表示位置は、前記作業車両の状態に応じて調整される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項6】
前記指標の表示位置は、前記作業車両が走行する作業場の状態に応じて調整される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項7】
前記指標の表示位置および表示態様のうち少なくともいずれか一方は、前記作業車両に対して設定された旋回方法に基づいて変更される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項8】
前記指標の表示位置および表示態様のうち少なくともいずれか一方は、前記作業車両に対して設定された走行駆動方式に基づいて変更される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項9】
前記指標の表示位置および表示態様のうち少なくとも前記表示位置は、前記作業車両に対して設定された旋回半径に基づいて変更される、請求項1から3のいずれか1項に記載の操作支援方法。
【請求項10】
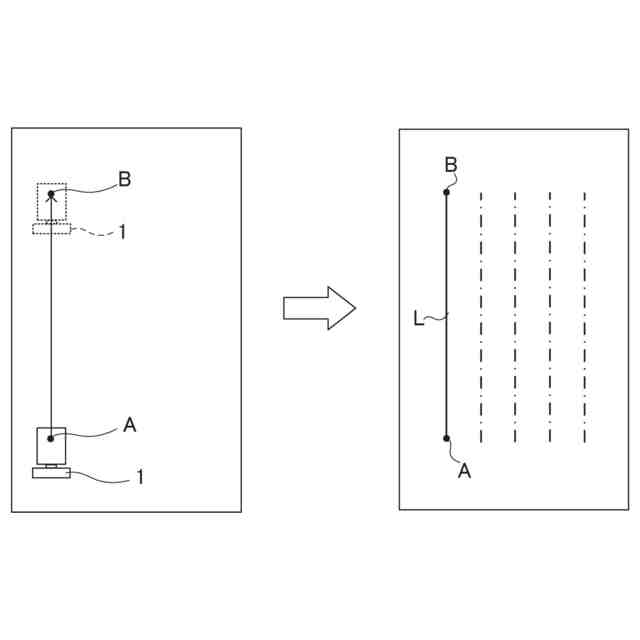
互いに並んで配置される複数の経路を生成し、
前記旋回走行の際にスキップする前記経路の数であるスキップ数を設定し、
前記指標の表示位置および表示態様のうち少なくとも一方は、前記スキップ数に基づいて変更される、請求項1から3のいずれか1項に記載の操作支援方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行を行う作業車両に対してオペレータが行う操作の支援(操作支援)を行う技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
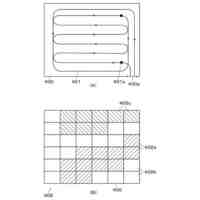
従来、圃場で作業車両を自律走行させる自律走行システムが知られる(例えば特許文献1参照)。特許文献1には、自律走行システムにおいて、直線経路に沿って作業車両が作業を行う領域を広くすることが可能な構成が開示される。
【0003】
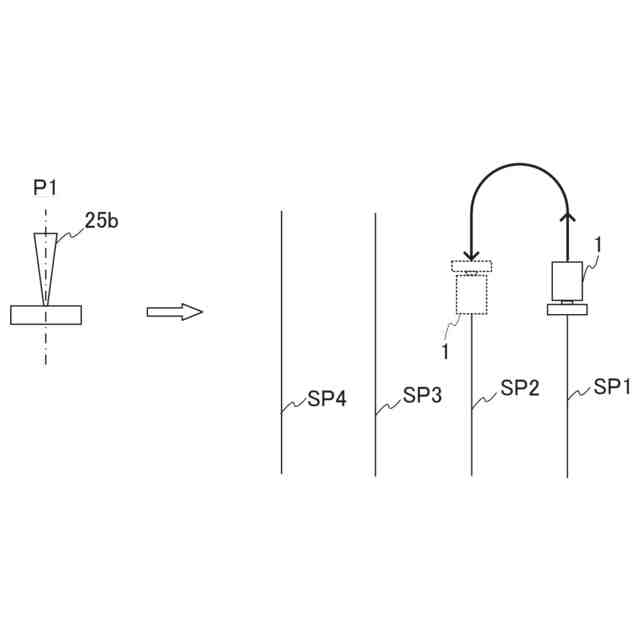
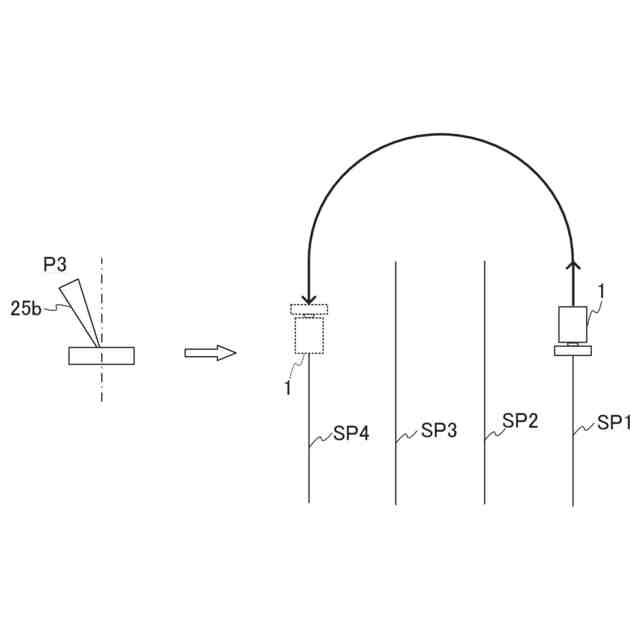
特許文献1に開示される構成によれば、圃場端に向かって走行(少なくとも操舵が自律的に行われる走行)中の作業車両をオペレータが停止させた後に、オペレータの操作に応じて又は自律的に作業車両が後進される。そして、後進中の作業車両をオペレータが又は自律的に停止させた後であって、オペレータによる前進指示があったことを条件として、作業車両に、少なくとも操舵を自律的に行わせて予め指定された直線経路に向かう旋回走行を行わせる。この構成では、オペレータは、視認し易い圃場端を目印として、次の直線経路に移るために必要となる停止指示を出すことができる。このために、オペレータは、圃場端ぎりぎりの位置で、次の直線経路に移るために必要となる停止指示を出することができる。この結果、直線経路に沿って作業車両が作業を行う領域を広くすることができる。
【先行技術文献】
【特許文献】
【0004】
特開2020-137463号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示される技術の場合、作業を行う経路の切り替えに要する時間が長くなることが懸念される。作業が行われる領域が狭くなることをなるべく抑制しつつ、効率良く経路の切り替えを行うことができる技術が望まれる。
【0006】
本発明は、上記の点に鑑み、オペレータの操作に応じて自動で旋回走行を行う作業車両における操作支援を適切に行うことができる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
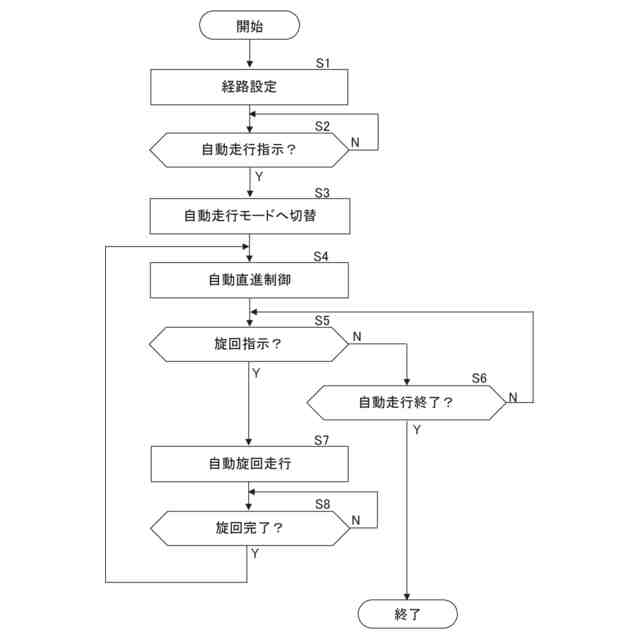
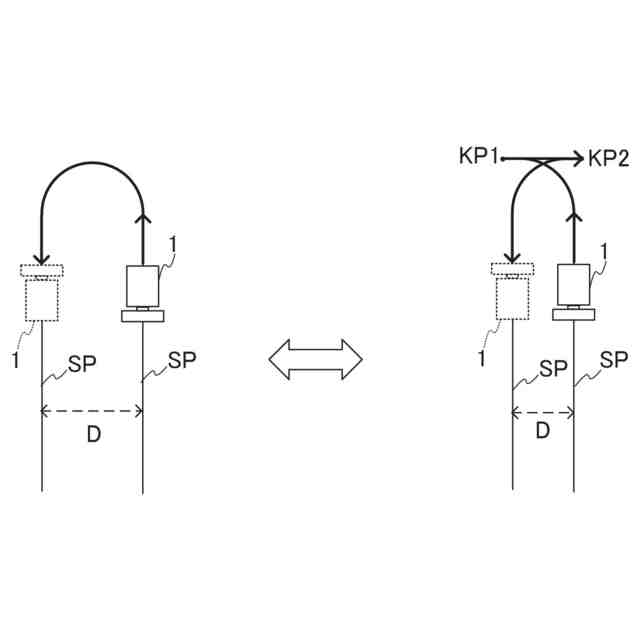
本発明の例示的な操作支援方法は、オペレータの操作に応じて自動で旋回走行を行う作業車両の操作支援方法であって、前記作業車両の進行方向前方側に前記旋回走行に関わる指標を表示させる。
【0008】
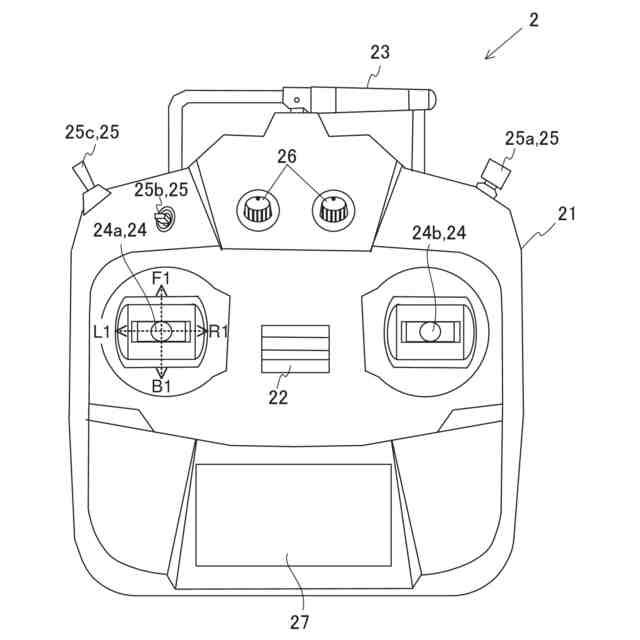
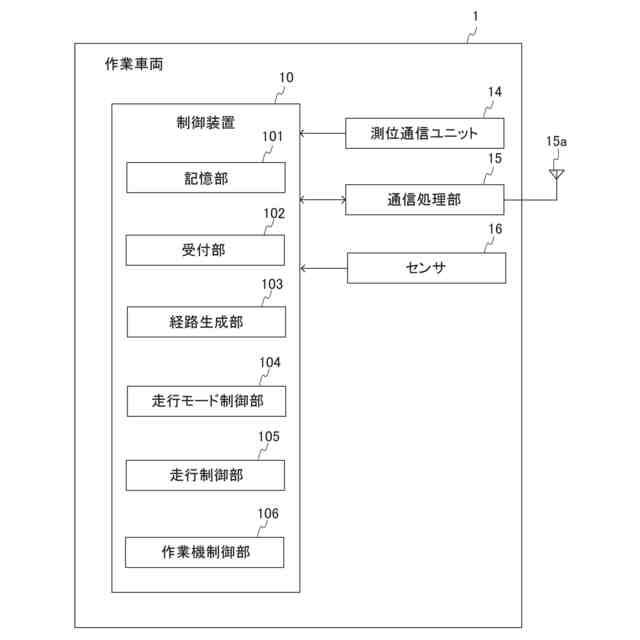
本発明の例示的な操作支援システムは、オペレータに操作される操作装置と、前記操作装置からの指示に応じて自動で旋回走行を行う作業車両と、前記作業車両の進行方向前方側に前記旋回走行に関わる指標を表示する指標表示装置と、を備える。
【0009】
本発明の例示的なプログラムは、オペレータの操作に応じて自動で旋回走行を行う作業車両の操作支援方法をコンピュータに実行させるプログラムであって、前記コンピュータを、前記作業車両の進行方向前方側に前記旋回走行に関わる指標を表示させることを行う手段として機能させる。
【発明の効果】
【0010】
例示的な本発明によれば、オペレータの操作に応じて自動で旋回走行を行う作業車両における操作支援を適切に行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
播種機
11日前
個人
尿処理材
26日前
有限会社マイク
囲い罠
4日前
井関農機株式会社
コンバイン
4日前
株式会社シマノ
釣り具
4日前
個人
室内栽培システム
7日前
井関農機株式会社
圃場作業機
今日
井関農機株式会社
圃場管理装置
12日前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
圃場管理装置
18日前
井関農機株式会社
移植機
11日前
株式会社西部技研
空調システム
1か月前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
11日前
株式会社シマノ
釣竿
28日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
11日前
株式会社ダイイチ
海苔網の酸処理船
7日前
株式会社山田鉄工
海苔網処理船
7日前
株式会社山田鉄工
海苔網処理船
7日前
株式会社山田鉄工
海苔網処理船
7日前
井関農機株式会社
作業車両
26日前
大栄工業株式会社
誘引剤収容容器
5日前
三菱マヒンドラ農機株式会社
耕耘作業機
28日前
松山株式会社
スタンド装置
11日前
株式会社ドクター中松創研
農薬用ウクルマ
6日前
株式会社クボタ
田植機
11日前
株式会社シマノ
釣糸ガイド及び釣竿
6日前
株式会社クボタ
歩行型作業機
27日前
伯東株式会社
水処理組成物及び水処理方法
28日前
株式会社クボタ
移植機
11日前
井関農機株式会社
水田管理システム
18日前
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ