TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095180
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211018
出願日
2023-12-14
発明の名称
操作装置及び作業車両
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
A01B
69/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】部品点数の増大を抑えつつ、作業の効率を向上することができる技術を提供する。
【解決手段】手動走行と自動走行とを切替可能な作業車両に備わる操作装置であって、手動走行時に作業車両の操舵に関わる設定を行う操舵操作部を備える。操舵操作部は、自動走行時に手動走行時とは異なる設定を行う。
【選択図】図3
特許請求の範囲
【請求項1】
手動走行と自動走行とを切替可能な作業車両に備わる操作装置であって、
前記手動走行時に作業車両の操舵に関わる設定を行う操舵操作部を備え、
前記操舵操作部は、前記自動走行時に前記手動走行時とは異なる設定を行う、操作装置。
続きを表示(約 720 文字)
【請求項2】
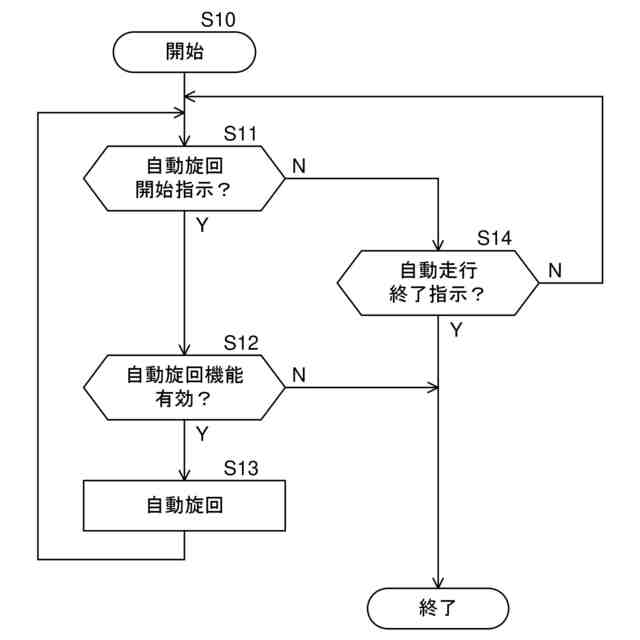
前記操舵操作部は、前記自動走行時に操作されると、前記作業車両を自動旋回させる設定を行う、請求項1に記載の操作装置。
【請求項3】
前記操舵操作部は、前記自動走行時に操作されると、前記手動走行に切り替える設定を行う、請求項1に記載の操作装置。
【請求項4】
前記操舵操作部は、前記自動走行時に、
前記作業車両を自動旋回させる機能が有効状態で操作されると、前記作業車両を自動旋回させる設定を行い、
前記機能が無効状態で操作されると、前記手動走行に切り替える設定を行う、請求項1に記載の操作装置。
【請求項5】
前記操舵操作部は、前記自動走行時に操作されると、前記自動走行の走行経路を変更する設定を行う、請求項1に記載の操作装置。
【請求項6】
前記操舵操作部は、第1操舵操作部と、第2操舵操作部とを有し、
前記第1操舵操作部は、前記自動走行時に操作されると、前記作業車両を自動旋回させる設定を行い、
前記第2操舵操作部は、前記自動走行時に操作されると、前記自動走行の走行経路を変更する設定を行う、請求項1に記載の操作装置。
【請求項7】
前記第1操舵操作部と前記第2操舵操作部とは、前記手動走行時に同じ操作がされると、前記作業車両を互いに異なる旋回半径で旋回させる設定を行う、請求項6に記載の操作装置。
【請求項8】
前記第1操舵操作部及び前記第2操舵操作部は、並べて配置される、請求項6に記載の操作装置。
【請求項9】
請求項1から8のいずれかに記載の操作装置を備える、作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作装置と、その操作装置を備える作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、操舵ハンドルを備えるとともに、自律走行可能に構成される作業車両が開示されている。作業車両は、オペレータが操舵ハンドルを操作することで、操舵(手動走行)が行われている。また、自律走行においては、作業車両が自律的に操舵を行っている。自律走行時には、操舵ハンドルは操作されず、実質的な機能を有さない。
【先行技術文献】
【特許文献】
【0003】
特開2020-137463号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、手動走行と自動走行とを切替可能な作業車両においては、手動走行しか行えない作業車両に比べて設定すべき項目が多くなる。設定すべき項目の増大に合わせて操作部の数を増やすと、オペレータは様々な位置に配置される操作部を利用して設定作業を行う必要があり、作業効率が低下することが懸念される。このため、操作部の数を増やさずに、設定すべき項目の増大に対応できることが望まれる。
【0005】
本発明は、上記の問題点を解決するためになされたものであり、その目的は、部品点数の増大を抑えつつ、作業の効率を向上することができる技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一側面に係る作業車両の操作装置は、手動走行と自動走行とを切替可能な作業車両に備わる操作装置であって、前記手動走行時に作業車両の操舵に関する設定を行う操舵操作部を備え、前記操舵操作部は、前記自動走行時に前記手動走行時とは異なる設定を行う。
【発明の効果】
【0007】
上記の構成によれば、部品点数の増大を抑えつつ、作業の効率を向上することができる。
【図面の簡単な説明】
【0008】
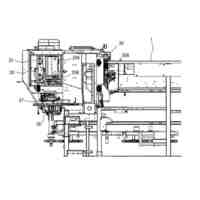
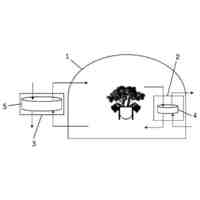
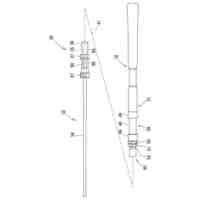
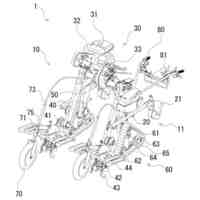
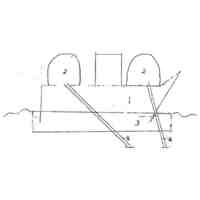
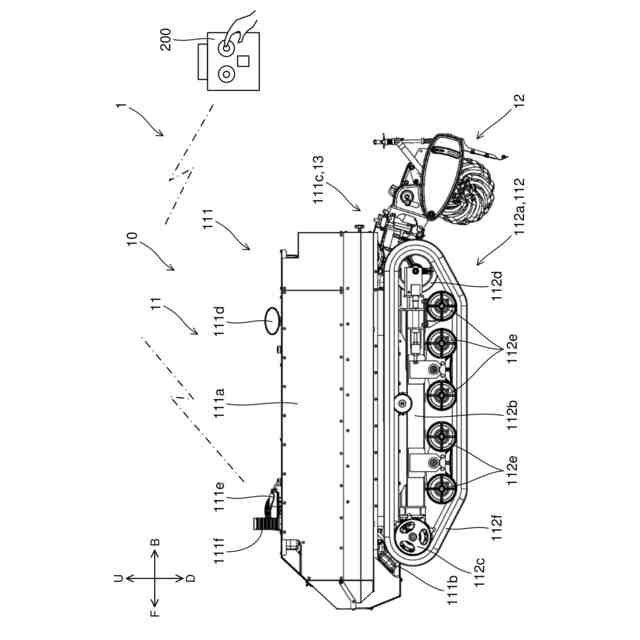
本発明の実施の一形態に係る作業車両の概略の構成を示す図である。
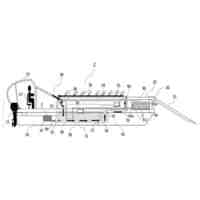
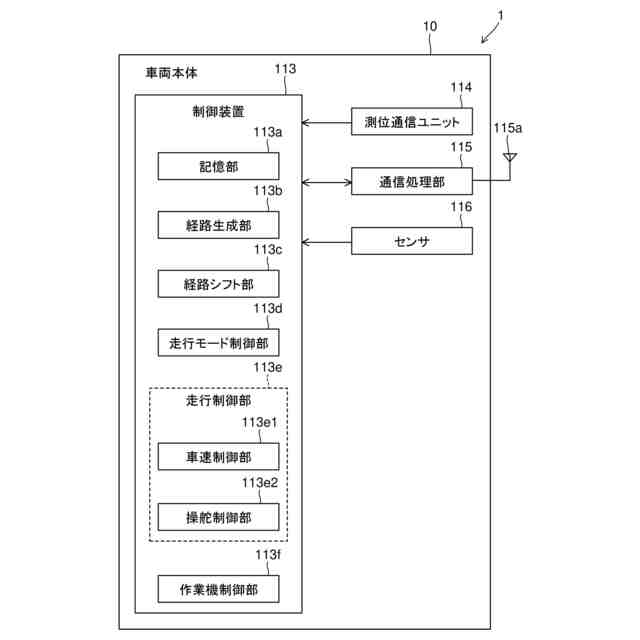
上記作業車両の自動走行に関わる構成を模式的に示すブロック図である。
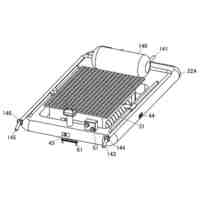
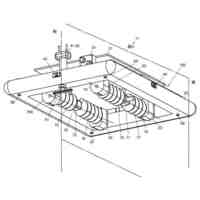
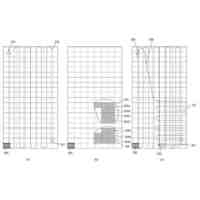
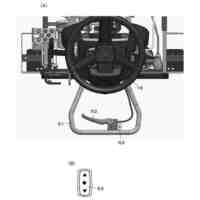
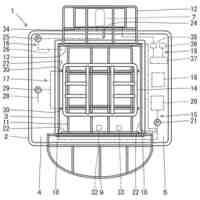
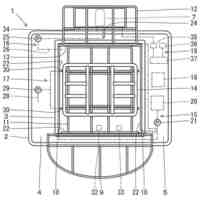
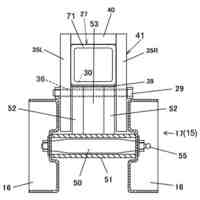
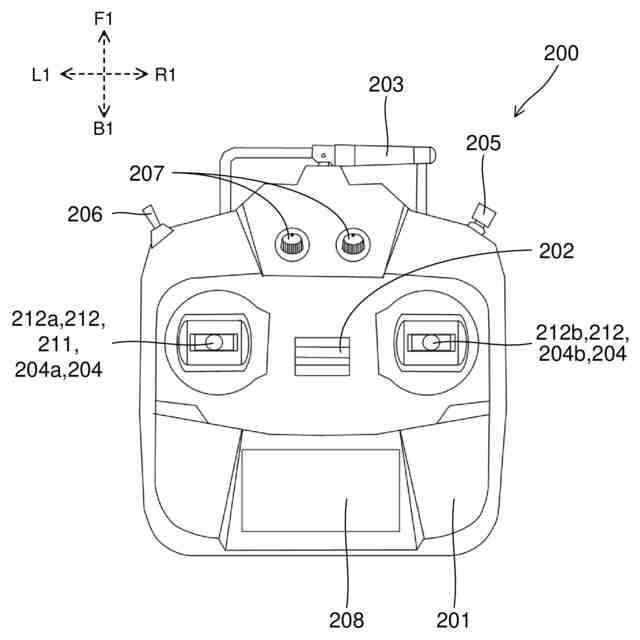
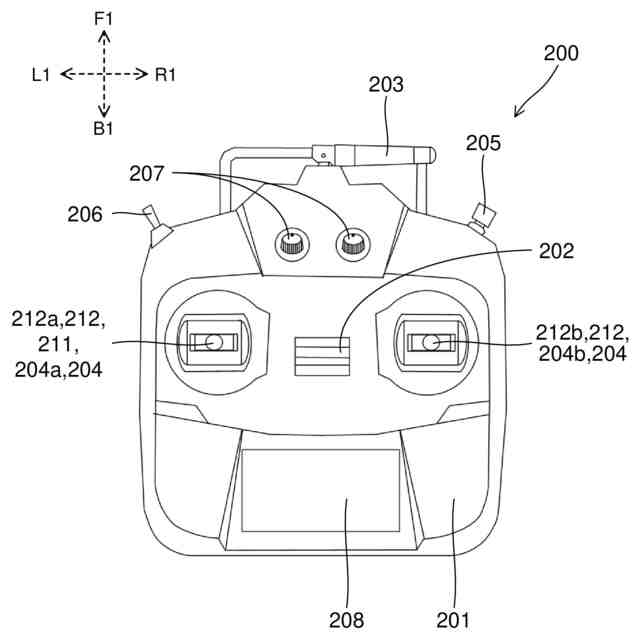
上記作業車両に備わる操作装置の構成を示す平面図である。
上記自動走行の開始設定の流れを示すフローチャートである。
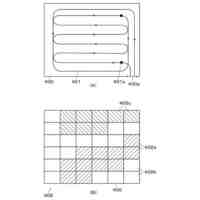
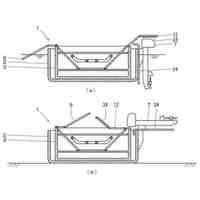
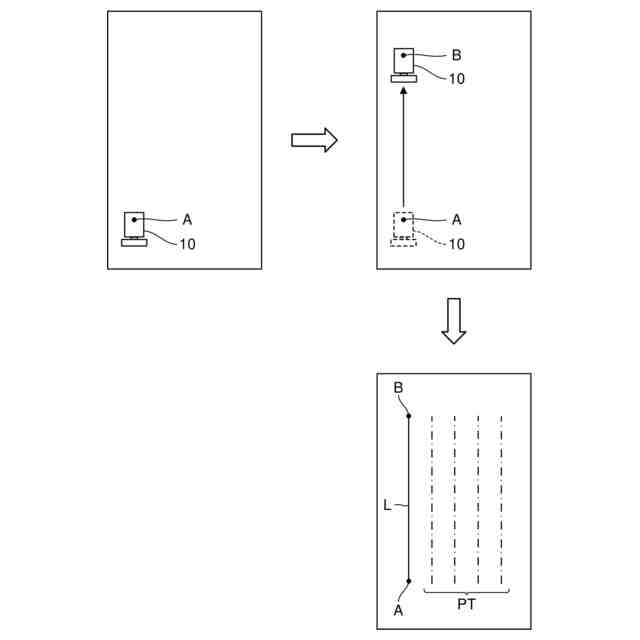
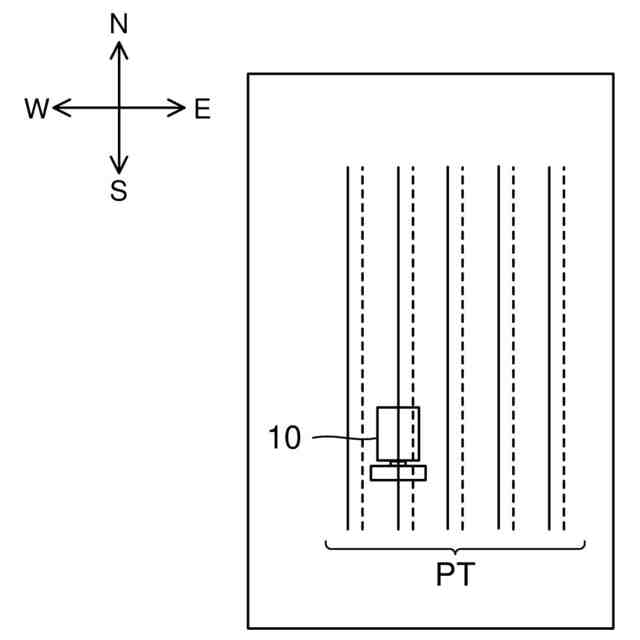
上記自動走行の走行経路の登録を説明する説明図である。
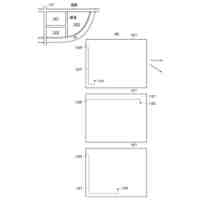
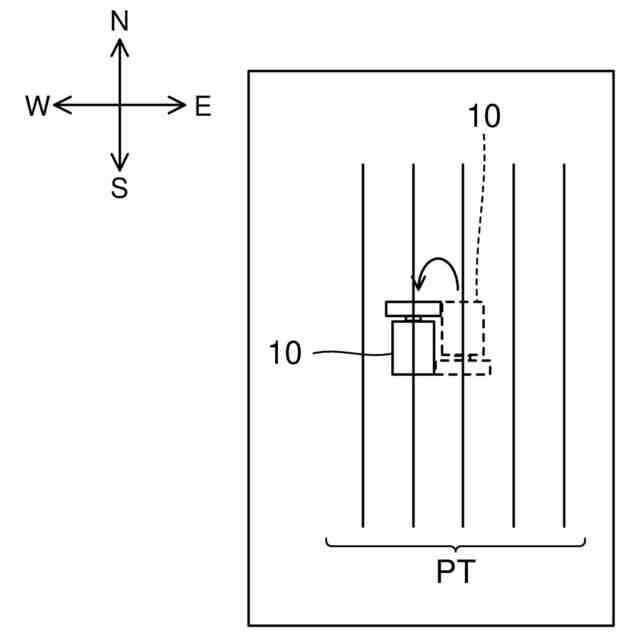
上記作業車両の自動旋回を説明する説明図である。
上記自動旋回の開始設定の流れを示すフローチャートである。
上記走行経路のシフトを説明する説明図である。
上記走行経路のオフセットを説明する説明図である。
上記走行経路の回転を説明する説明図である。
【発明を実施するための形態】
【0009】
本発明の実施の形態について、図面に基づいて説明すれば、以下の通りである。
【0010】
〔1.作業車両の概略構成〕
図1は、本発明の実施の一形態に係る作業車両1の概略の構成を示す図である。作業車両1は、例えば農作業、建設作業等の作業を行うために利用される。作業車両1は、車両本体10と、車両本体10とは別体で設けられる操作装置200と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
苗キャップ
1か月前
個人
播種機
9日前
個人
尿処理材
24日前
株式会社アテックス
草刈機
1か月前
個人
室内栽培システム
5日前
個人
水耕栽培システム
1か月前
有限会社マイク
囲い罠
2日前
井関農機株式会社
コンバイン
2日前
株式会社シマノ
釣り具
2日前
井関農機株式会社
移植機
9日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
圃場管理装置
16日前
井関農機株式会社
圃場管理装置
24日前
株式会社西部技研
空調システム
29日前
井関農機株式会社
圃場管理装置
10日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
24日前
株式会社シマノ
釣竿
26日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1か月前
株式会社ダイイチ
海苔網の酸処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
関東農機株式会社
ロータリ管理機
1か月前
井関農機株式会社
作業車両
24日前
合同会社小林知財研鑽処
液体空気散布船
1か月前
松山株式会社
スタンド装置
9日前
大栄工業株式会社
誘引剤収容容器
3日前
三菱マヒンドラ農機株式会社
耕耘作業機
26日前
株式会社シマノ
釣糸ガイド及び釣竿
4日前
井関農機株式会社
水田管理システム
16日前
株式会社クボタ
移植機
9日前
株式会社ドクター中松創研
農薬用ウクルマ
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ