TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093890
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2024215128
出願日
2024-12-10
発明の名称
物品をピッキングするためのシステムおよび方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G06T
7/70 20170101AFI20250617BHJP(計算;計数)
要約
【課題】複数の物体を認識して荷降ろしするための方法及びシステムを提供する。
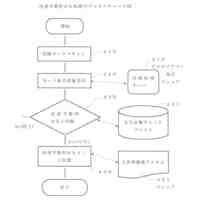
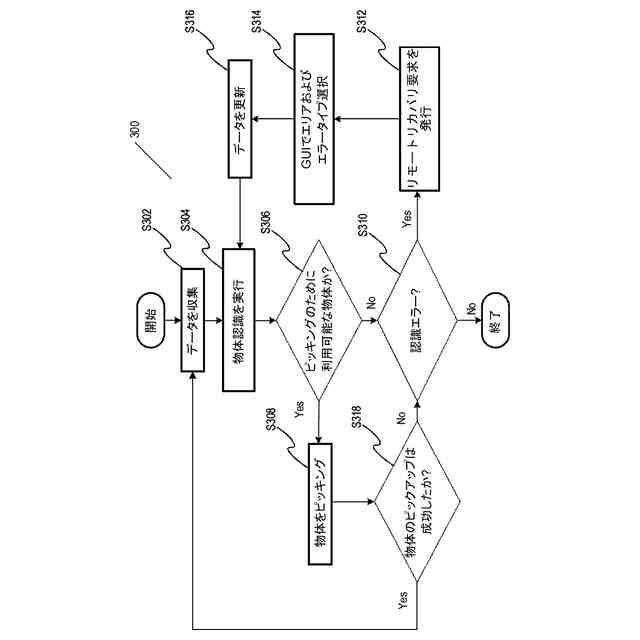
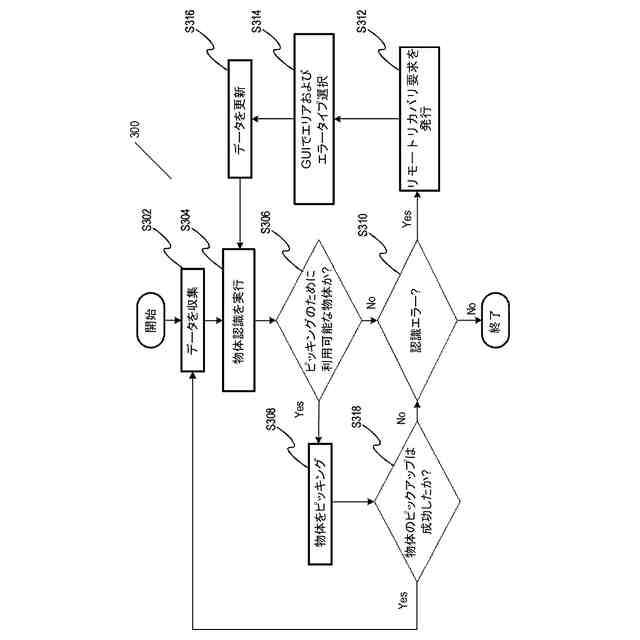
【解決手段】ロボットデバイスを含むシステムにおいて、方法は、複数の物体が荷降ろしされるまで、視覚センサを通して物体データを収集することと、前記物体データに基づいて物体姿勢および物体位置を判定することによって物体認識を実行することと、前記複数の物体のうちの物体が、ピッキングのために利用可能であると判定された場合、ロボットデバイスを使用して前記物体をピックアップして荷降ろしすることと、ピッキングのために利用可能であると判定された物体がない場合、物体認識エラーの発生を判定することと、前記物体認識エラーが検出された場合、前記物体認識エラーに対処するためにリカバリプロセスを実行することと、前記物体認識エラーが検出されていない場合、前記複数の物体の荷降ろしの完了を認識することと、を実行することと、を繰り返し実行する。
【選択図】図3
特許請求の範囲
【請求項1】
複数の物体を認識して荷降ろしするための方法であって、前記複数の物体が荷降ろしされるまで、
プロセッサによって、視覚センサを通して物体データを収集することと、
前記プロセッサによって、前記物体データに基づいて物体姿勢および物体位置を判定することによって物体認識を実行することと、
前記複数の物体のうちの物体が認識され、ピッキングのために利用可能であると判定された場合、ロボットデバイスを使用して前記物体をピックアップして荷降ろしすることと、
ピッキングのために利用可能であると判定された物体がない場合、
前記プロセッサによって、物体認識エラーの発生を判定することと、
前記物体認識エラーが検出された場合、前記プロセッサによって、前記物体認識エラーに対処するためにリカバリプロセスを実行することと、
前記物体認識エラーが検出されていない場合、前記プロセッサによって、前記複数の物体の荷降ろしの完了を認識することと、を実行することとを繰り返し実行することを含む、方法。
続きを表示(約 1,800 文字)
【請求項2】
前記物体姿勢が物体寸法を含む、請求項1に記載の方法。
【請求項3】
前記プロセッサが、前記物体認識エラーに対処するための前記リカバリプロセスを、
前記物体データを含むリカバリ要求をユーザに送ることと、
前記リカバリ要求に応答して、前記ユーザから補正応答を受信することであって、前記補正応答が、少なくとも1つの選択された認識エラーエリアと、少なくとも1つの種類の認識エラーとを含む、受信することと、
前記補正応答に基づいて物体認識のためのデータを更新し、物体認識を再実行することと
によって実行するように構成されている、請求項1に記載の方法。
【請求項4】
物体認識が、少なくとも1つの学習可能な物体認識機能を使用して実行される、請求項3に記載の方法。
【請求項5】
前記少なくとも1つの学習可能な物体認識機能の訓練が、オンラインか、またはオフラインで実行される、請求項4に記載の方法。
【請求項6】
前記物体データを含む前記リカバリ要求を前記ユーザに送ることが、前記リカバリ要求を、前記ユーザが検討するためにグラフィックユーザインターフェース(GUI)に送ることを含む、請求項3に記載の方法。
【請求項7】
前記プロセッサが、確信度の値を生成するために前記複数の物体に対して物体確信度演算を実行することによって物体認識を実行するように構成されており、各確信度の値が、前記複数の物体のうちの対応する物体に関連付けられており、
前記複数の物体のうちの物体の認識が、
前記物体の確信度の値を確信度閾値と比較し、
前記物体の前記確信度の値が前記確信度閾値以上である場合、前記物体を認識済みと判定し、
前記物体の前記確信度の値が前記確信度閾値未満の場合、前記物体を認識されていないと判定することによって実行され、
前記プロセッサが、前記確信度閾値に対して閾値調整をさらに実行することによって前記物体認識エラーに対処するために前記リカバリプロセスを実行するように構成されている、
請求項3に記載の方法。
【請求項8】
前記プロセッサが、物体認識を、
第1の物体境界を検出するために、前記複数の物体の赤、青、および緑(RGB)の画像を使用して物体エッジ検出を実行し、
第2の物体境界を検出するために、前記複数の物体の深さ画像を使用して物体エッジ検出を実行し、
第1の訓練された機械学習モデルに対する入力として、前記RGB画像を使用して第1の確率画像を生成し、
第2の訓練された機械学習モデルに対する入力として、前記深さ画像を使用して第2の確率画像を生成し、
前記第1の確率画像および前記第2の確率に対して重みを割り当て、
前記複数の物体の二値化エッジマップを生成するために前記重みに基づいて前記第1の確率画像および前記第2の確率画像を結合し、
前記二値化エッジマップを使用して前記複数の物体の物体認識を実行することによって実行するように構成されており、
前記物体データが、前記RGB画像および前記深さ画像を含む、請求項3に記載の方法。
【請求項9】
前記プロセッサが、前記物体認識エラーに対処するための前記リカバリプロセスを、
物体認識の結果として誤って分割された物体または誤って分割されていない物体の存在を検出することと、
物体認識を改善するために、前記第1の確率画像および前記第2の確率画像に割り当てられた前記重みを調整することと
をさらに実行することによって実行するように構成されている、請求項8に記載の方法。
【請求項10】
前記プロセッサが、前記第1の確率画像および前記第2の確率画像に割り当てられた前記重みを、
失敗した物体分割が検出された場合、前記重みのうちの第1の重みを増加させるか、または前記重みのうちの第2の重みを減少させ、前記第1の重みが前記第1の確率画像に関連付けられており、前記第2の重みが前記第2の確率画像に関連付けられており、
誤って分割された物体が検出された場合、前記第1の重みを減少させるか、または第2の重みを増加させる、ことによって調整するように構成されている、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に、物体認識および荷降ろしを実行するための方法およびシステムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
業務動作の一部として、パレットからの物品のデパレタイズは、小売業者、卸売業者、および他のサードパーティの物流ベンダによって実行されている。いくつかのパレットは1種類の小荷物または単一の最小在庫管理単位(Stock Keeping Unit、SKU)のみを有する場合があるが、他のパレットは、混載SKUとしても知られている異なる種類の小荷物を含む場合がある。ロボットアームなどのロボットデバイスは、単一SKUおよび混載SKUの両方のパレタイズおよびデパレタイズを実行する際に使用されている。
【0003】
関連技術において、コンピュータビジョン技法(例えば、従来のルール依存型方法、機械学習ベースの方法など)を利用した認識ソフトウェアが開発され、物体およびそれらの場所を認識する際に利用されてきた。物体認識を実行すると、ロボットデバイスは次いで認識結果に基づいて識別された物体をピッキング/把持して、移動させることに進む。しかしながら、認識ソフトウェアは、物品/物体を正確に認識できず、パレタイズおよびデパレタイズの失敗につながるという課題が残っている。これは、混載SKUのデパレタイズに関しては、多くの種類の物体が関与するため、特に問題である。
【0004】
関連技術において、リモート知覚支援および物体識別修正を実行するための方法が開示されている。物体識別を検証して修正を提供するために、リモート支援が望まれている。その修正に基づいて、物体に対する追加の処理作業が次いでロボットによって実行される。
【0005】
関連技術において、ピッキングするための物体を識別するために機械学習モデルを訓練するための方法が開示されている。機械学習モデルを訓練する際に使用されるデータは、機械学習モデルが物体検出に失敗したエッジケースから収集されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
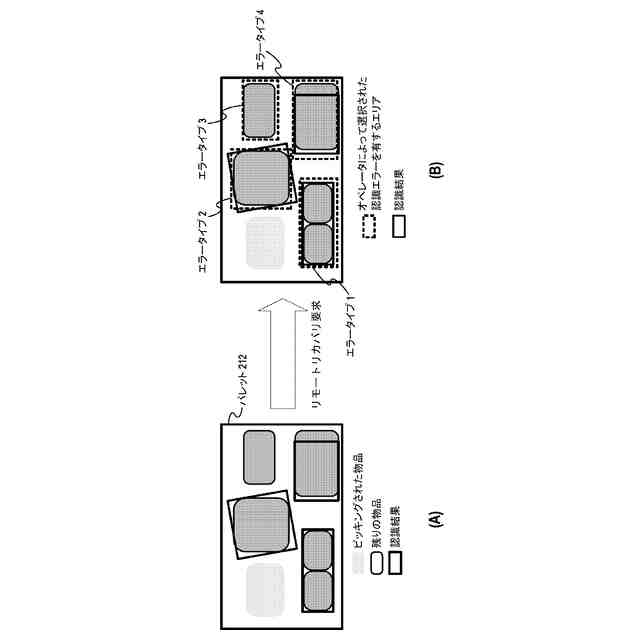
現在、誤認識結果またはエラーが発生したときに、リモートリカバリが必要とされる。リモートリカバリは、ロボットデバイスに、パレット上の物体の画像を人間オペレータに対して送らせ、人間オペレータが次いで検出されていない物体または誤って別の物体とグループ化されている物体に対して物体エリア選択を実行し(例えば、物体に対して矩形エリアを生成する)、ロボットデバイスに対して、識別されるようになった物体をピッキング/把持することを命令することによって実行される。しかしながら、このリモートリカバリプロセスは、以下の2つの理由のために不十分である。1)人間によって実行されるときの手作業の物体選択は、物体選択および面倒な注釈の複雑性に起因して時間がかかる場合がある、および2)認識ソフトウェアの認識度/認識能力は、物体境界などの有用な情報が提供または利用されていないときに改善されない。
【0007】
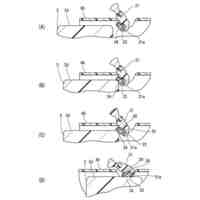
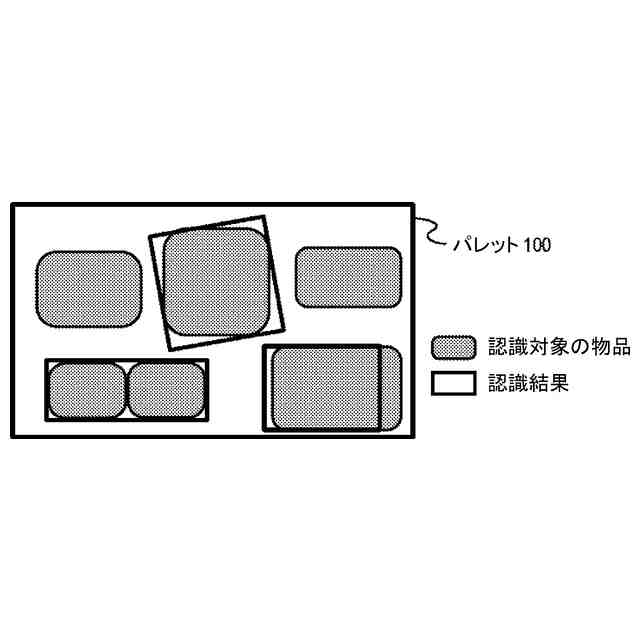
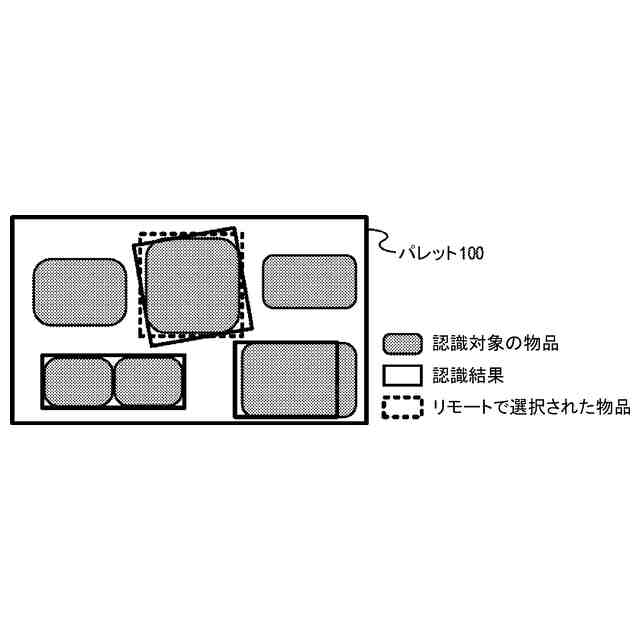
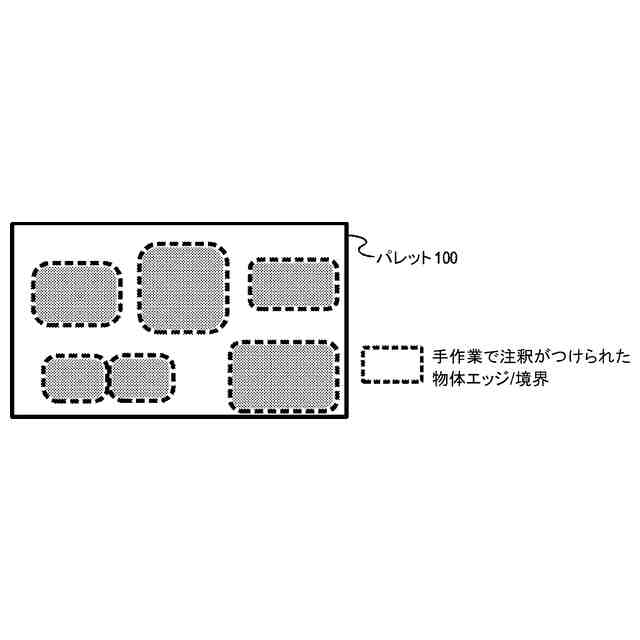
図1(A)~図1(C)は、従来のリカバリプロセスの例示的なプロセスフローを示す図である。図1(A)に示すように、認識エラーが発生し、識別されている。様々な認識エラーは、図1(A)に示される物体に関連している。特に、左上の物体および右上の物体は認識されておらず、中央の物体は姿勢エラーを有し、右下の物体は正しくフィットしておらず、左下の物体は、分割されておらず、正しくない。パレット100上の中央の物体を例として使用すると、姿勢エラーが識別されており、リモートリカバリ支援が必要である。図1(B)に示すように、中央の物体は、リカバリアプローチの下で人間オペレータによってリモートで選択されている。どの物体を選択するかを判定し、その物体を強調することは専門知識が必要であり、時間がかかる場合がある。図1(C)に示すように、物体認識機能を改善するために必要な情報は、手作業で注釈付けされ、追加のコストおよび時間がかかる。
【課題を解決するための手段】
【0008】
本開示の態様は、複数の物体を認識して荷降ろしするための革新的な方法を伴う。本方法は、複数の物体が荷降ろしされるまで、プロセッサによって、視覚センサを通して物体データを収集することと、プロセッサによって、物体データに基づいて物体姿勢および物体位置を判定することによって物体認識を実行することと、複数の物体のうちの物体が認識され、ピッキングのために利用可能であると判定された場合、ロボットデバイスを使用して物体をピックアップして荷降ろしすることと、ピッキングのために利用可能であると判定された物体がない場合、プロセッサによって、物体認識エラーの発生を判定することと、物体認識エラーが検出された場合、プロセッサによって、物体認識エラーに対処するためにリカバリプロセスを実行することと、物体認識エラーが検出されていない場合、プロセッサによって、複数の物体の荷降ろしの完了を認識することと、を実行することとを繰り返し実行することを含み得る。
【0009】
本開示の態様は、複数の物体を認識して荷降ろしするための命令を記憶する、革新的な非一時的コンピュータ可読媒体を伴う。本命令は、複数の物体が荷降ろしされるまで、プロセッサによって、視覚センサを通して物体データを収集することと、プロセッサによって、物体データに基づいて物体姿勢および物体位置を判定することによって物体認識を実行することと、複数の物体のうちの物体が認識され、ピッキングのために利用可能であると判定された場合、ロボットデバイスを使用して物体をピックアップして荷降ろしすることと、ピッキングのために利用可能であると判定された物体がない場合、プロセッサによって、物体認識エラーの発生を判定することと、物体認識エラーが検出された場合、プロセッサによって、物体認識エラーに対処するためにリカバリプロセスを実行することと、物体認識エラーが検出されていない場合、プロセッサによって、複数の物体の荷降ろしの完了を認識することと、を実行することとを繰り返し実行することを含み得る。
【0010】
本開示の態様は、複数の物体を認識して荷降ろしするための革新的なサーバシステムを伴う。本サーバシステムは、複数の物体が荷降ろしされるまで、プロセッサによって、視覚センサを通して物体データを収集することと、プロセッサによって、物体データに基づいて物体姿勢および物体位置を判定することによって物体認識を実行することと、複数の物体のうちの物体が認識され、ピッキングのために利用可能であると判定された場合、ロボットデバイスを使用して物体をピックアップして荷降ろしすることと、ピッキングのために利用可能であると判定された物体がない場合、プロセッサによって、物体認識エラーの発生を判定することと、物体認識エラーが検出された場合、プロセッサによって、物体認識エラーに対処するためにリカバリプロセスを実行することと、物体認識エラーが検出されていない場合、プロセッサによって、複数の物体の荷降ろしの完了を認識することと、を実行することとを繰り返し実行することを含み得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
動作指令生成装置
3日前
株式会社日立製作所
製造工程管理システム
1日前
株式会社日立製作所
垂直離着陸機用エアポート
2日前
株式会社日立製作所
経路探索方法及び配送計画装置
1日前
株式会社日立製作所
埋設物検出装置、埋設物検出方法
2日前
株式会社日立製作所
飛行体制御装置および飛行体制御方法
1日前
株式会社日立製作所
回転機の異常診断装置及び異常診断方法
3日前
株式会社日立製作所
材料検索・配合設計装置及び配合設計方法
1日前
株式会社日立製作所
物体姿勢算出装置および物体姿勢算出方法
1日前
株式会社日立製作所
物品をピッキングするためのシステムおよび方法
2日前
株式会社日立製作所
業務影響範囲提示装置及び業務影響範囲提示方法
2日前
株式会社日立製作所
飛行体誘導システム、飛行体、飛行体管理装置および飛行体誘導方法
2日前
株式会社日立製作所
半導体集積回路の再利用判定装置、再利用判定システム及び再利用判定方法
2日前
株式会社日立製作所
ロボット制御装置、ロボット装置、ロボット制御システム、及びロボット制御方法
2日前
株式会社日立製作所
サプライチェーンネットワーク作成装置、サプライチェーンネットワーク作成方法およびプログラム
2日前
個人
対話装置
14日前
個人
物品給付年金
1か月前
個人
情報処理装置
14日前
個人
政治のAI化
1か月前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
情報処理装置
10日前
個人
記入設定プラグイン
2日前
個人
プラグインホームページ
28日前
個人
情報入力装置
14日前
個人
物価スライド機能付生命保険
14日前
キヤノン株式会社
通信装置
1か月前
個人
マイホーム非電子入札システム
14日前
個人
全アルゴリズム対応型プログラム
1か月前
キヤノン株式会社
画像処理装置
1か月前
株式会社BONNOU
管理装置
7日前
個人
決済手数料0%のクレジットカード
17日前
大同特殊鋼株式会社
輝線検出方法
1か月前
サクサ株式会社
カードの制動構造
16日前
シャープ株式会社
電子機器
1か月前
株式会社CROSLAN
支援装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ