TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093408
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209021
出願日
2023-12-12
発明の名称
ロボット制御装置、ロボット装置、ロボット制御システム、及びロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人開知
主分類
B25J
9/22 20060101AFI20250617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】変化する環境においてロボット装置を適切に動作させることが可能なロボット制御装置、ロボット装置、ロボット制御システム、及びロボット制御方法を提供する。
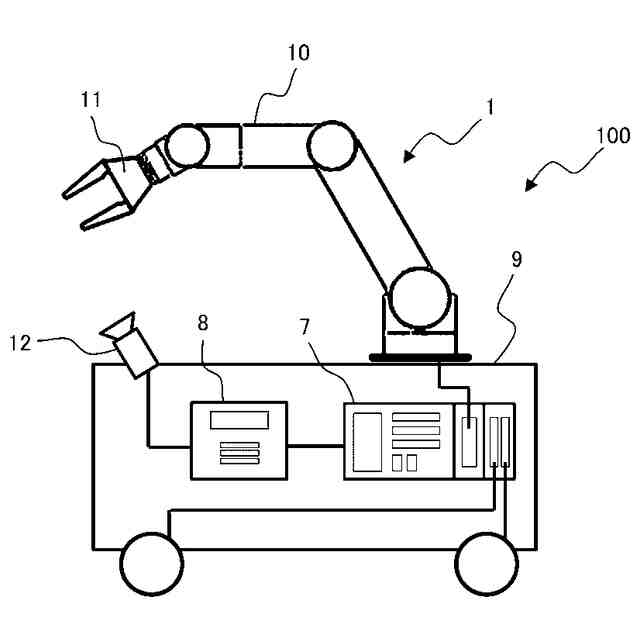
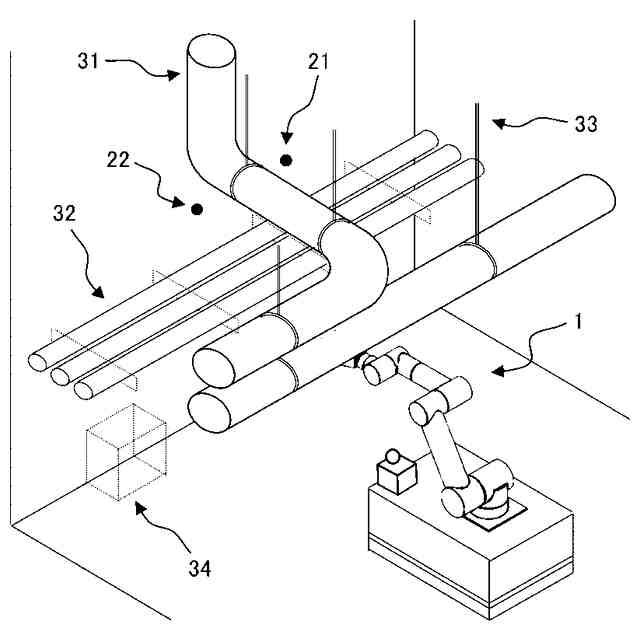
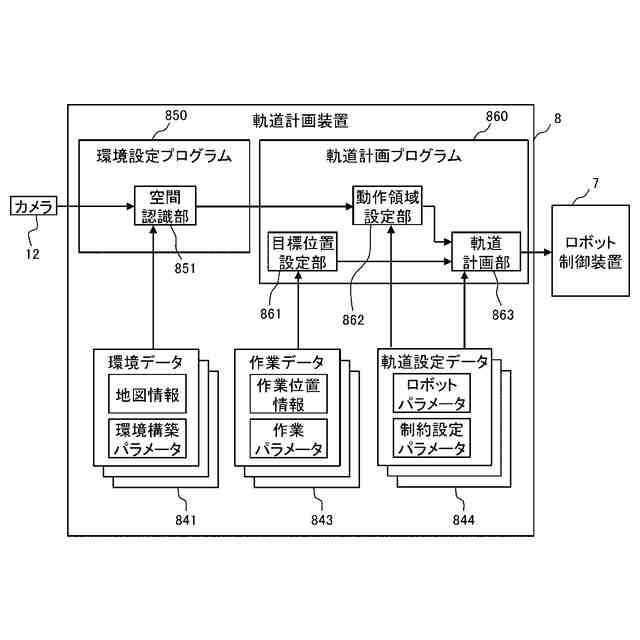
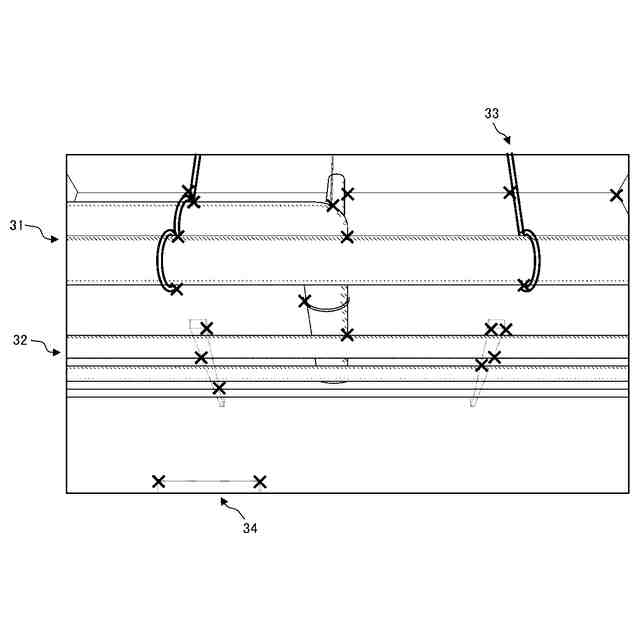
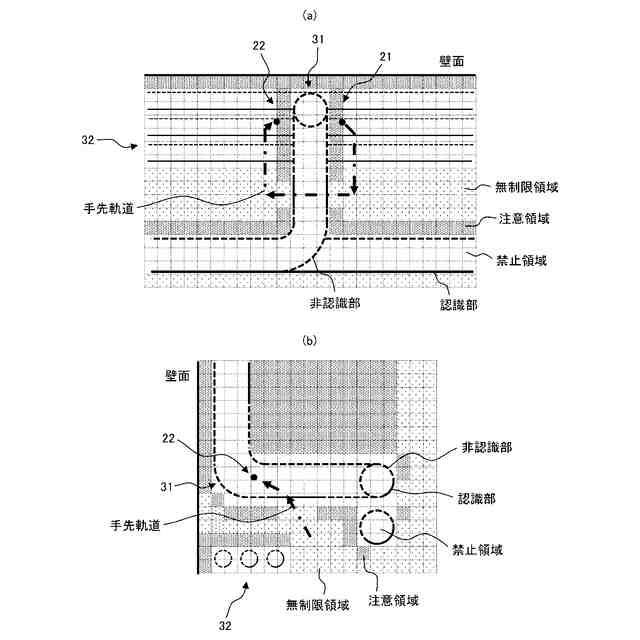
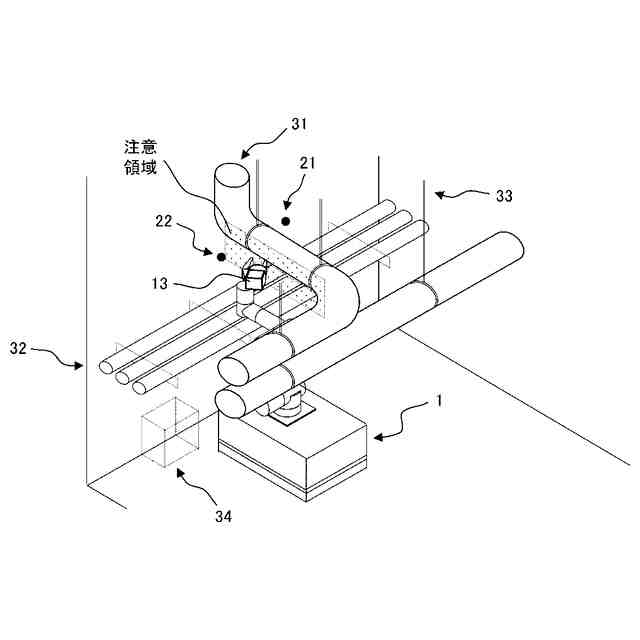
【解決手段】軌道計画装置8は、環境センサ12が取得した環境情報とロボット装置1の周囲環境の3次元モデルである環境モデルとをマッチングして、前記環境モデルに隣接する領域のうち前記環境センサが環境情報を取得できなかった領域を注意領域として設定し、前記環境モデルとエンドエフェクタ11の目標位置と前記注意領域とに基づいてロボットアーム10の動作軌道を計画し、ロボット制御装置7は、前記動作軌道に基づいてロボットアーム10を動作させる。
【選択図】 図7
特許請求の範囲
【請求項1】
回動する関節または平行移動する関節を有するロボットアームと前記ロボットアームの先端に取り付けられたエンドエフェクタとを備えたロボット装置を制御するロボット制御装置において、
前記エンドエフェクタの目標位置を設定し、前記ロボット装置の周囲環境の3次元モデルである環境モデルと前記目標位置とに基づいて前記ロボットアームの動作軌道を計画する軌道計画装置と、
前記周囲環境の情報を環境情報として取得する環境センサとを備え、
前記軌道計画装置は、
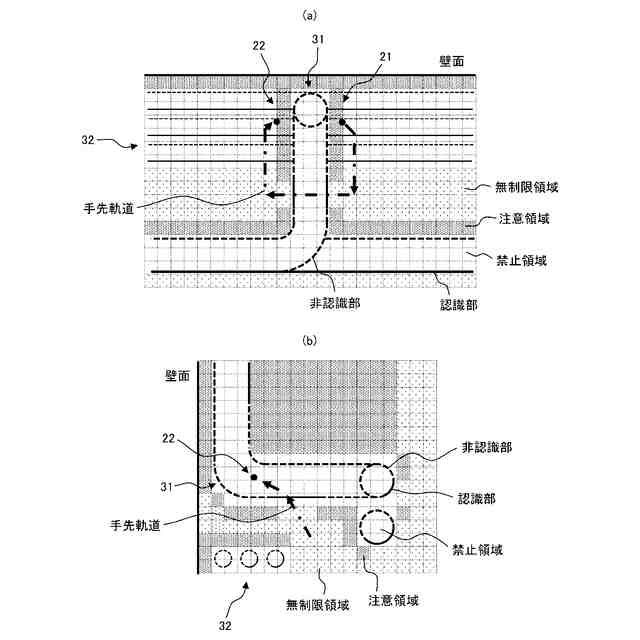
前記環境センサが取得した環境情報と前記環境モデルとをマッチングして、前記環境モデルに隣接する領域のうち前記環境センサが環境情報を取得できなかった領域を注意領域として設定し、
前記環境モデルと前記目標位置と前記注意領域とに基づいて前記動作軌道を計画し、
前記ロボット制御装置は、前記動作軌道に基づいて前記ロボットアームを動作させる
ことを特徴とするロボット制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載のロボット制御装置において、
前記軌道計画装置は、前記注意領域における前記ロボットアームの動作が制限されるように前記動作軌道を計画する
ことを特徴とするロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置において、
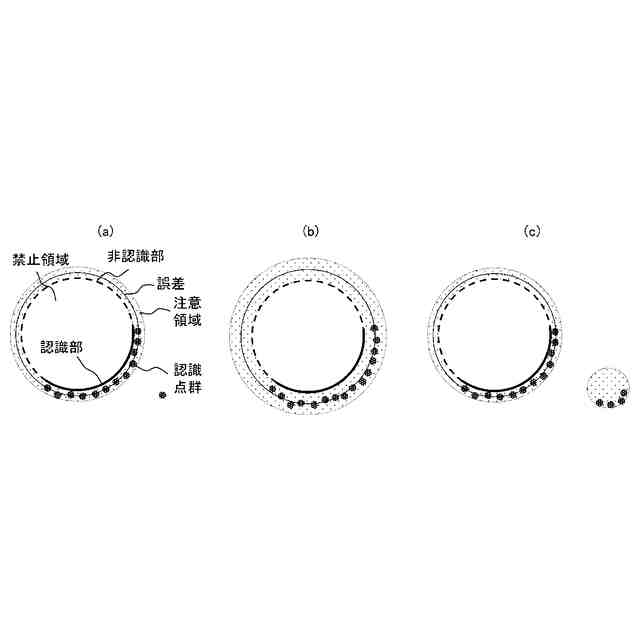
前記軌道計画装置は、前記環境センサが取得した環境情報と前記環境モデルとの一致度に応じて前記注意領域の範囲を変更する
ことを特徴とするロボット制御装置。
【請求項4】
請求項3に記載のロボット制御装置において、
前記軌道計画装置は、前記周囲環境の点群を前記環境情報として取得し、
前記点群と前記環境モデルとの誤差の平均を前記一致度として計算し、
前記環境モデルから前記誤差の平均を所定量拡大した範囲を前記注意領域の範囲として設定する
ことを特徴とするロボット制御装置。
【請求項5】
請求項1に記載のロボット制御装置において、
前記軌道計画装置は、前記ロボット装置の動作中に前記環境センサが前記注意領域内の環境情報を取得するように、前記ロボットアームの位置または姿勢を制限して前記動作軌道を計画する
ことを特徴とするロボット制御装置。
【請求項6】
請求項1に記載のロボット制御装置において、
前記軌道計画装置は、
前記ロボット装置の動作中に前記環境センサが取得した環境情報と前記環境モデルとの差分を環境誤差として記憶し、
前記環境モデルと前記目標位置と前記注意領域と前記環境誤差とに基づいて前記動作軌道を計画する
ことを特徴とするロボット制御装置。
【請求項7】
請求項1に記載のロボット制御装置と、
前記ロボットアームと、
前記エンドエフェクタとを備える
ことを特徴とするロボット装置。
【請求項8】
請求項1に記載のロボット制御装置と、
前記ロボット装置とを備える
ことを特徴とするロボット制御システム。
【請求項9】
請求項8に記載のロボット制御システムにおいて、
前記ロボット装置を遠隔で操作する遠隔操作装置と、
前記ロボット装置と前記遠隔操作装置との間で通信を行う無線通信装置とをさらに備え、
前記無線通信装置は、前記ロボット装置の状態、および、前記注意領域と前記注意領域以外の領域とを区別した前記環境情報を前記遠隔操作装置に送信し、
前記遠隔操作装置は、前記ロボット装置の状態を表示するとともに、前記注意領域と前記注意領域以外の領域とを区別して前記環境情報を表示する
ことを特徴とするロボット制御システム。
【請求項10】
回動する関節または平行移動する関節を有するロボットアームと前記ロボットアームの先端に取り付けられたエンドエフェクタとを備えたロボット装置を制御するロボット制御方法において、
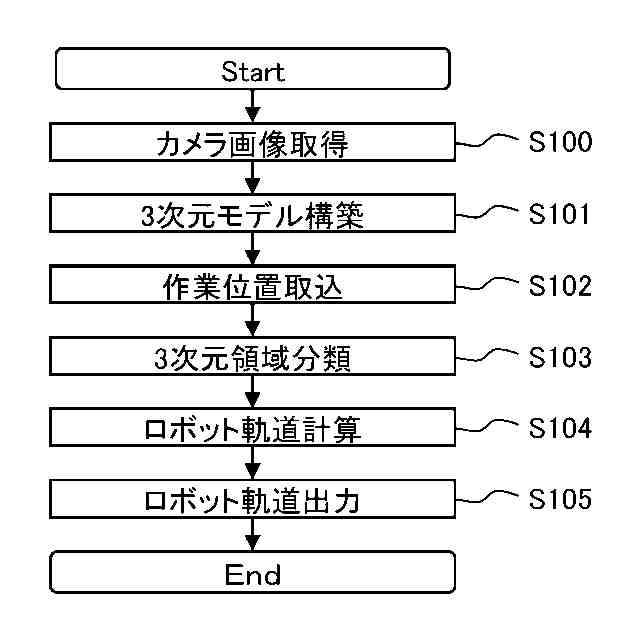
前記ロボット装置の周囲の環境情報を取得する第1ステップと、
前記第1ステップで取得した環境情報と前記ロボット装置の周囲環境の3次元モデルである環境モデルとをマッチングして、前記環境モデルに隣接する領域のうち前記環境情報を取得できなかった領域を注意領域として設定する第2ステップと、
前記エンドエフェクタの目標位置を設定する第3ステップと、
前記環境モデルと前記目標位置と前記注意領域とに基づいて前記ロボットアームの動作軌道を計画する第4ステップと、
前記動作軌道に基づいて前記ロボットアームを動作させる第5ステップとを備える
ことを特徴とするロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業を実行するロボットを制御するためのロボット制御システム、ロボット制御装置、ロボット装置、及びロボット制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
屋外における移動ロボットのように、変化する環境でロボットを利用するためには、ロボットが自律的に移動し、移動した先で作業する必要があり、移動に伴う自己位置のずれや作業対象物の変動に対して対応する必要がある。そこで、カメラ等の環境センサを用いてロボットの周囲環境を認識し、認識結果に基づきロボットの動作を自律的に生成し作業を遂行するロボットが知られている。周囲環境から環境中のロボットの位置を推定するとともに、障害物の位置を推定し、障害物を回避し目的の位置まで移動し作業することを繰り返すことで、周囲が変動する環境や事前に未知な状態が存在する環境においてもロボット装置に所定の作業を遂行させることができる。
【0003】
自律的に作業するロボットの制御装置に関する先行技術文献として、例えば特許文献1がある。特許文献1には、ロボットアームの作業領域の周辺環境に生じた変更を検出する検出部を備え、変更された領域におけるロボットアームの軌道を変更する制御装置が開示されている。この制御装置によれば、ロボットアームと障害物との接触を回避しつつ作業を遂行することが可能となる。
【先行技術文献】
【特許文献】
【0004】
特許6508691号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の制御装置は、環境変化の検出結果に応じて事前に定められた内容に沿ってロボットアームの軌道を変更するように構成されているが、環境変化の検出結果が不完全であった場合に、ロボットアームの軌道を変更しても環境中の障害物に対して接触する可能性が残り、ロボットアームが適切に作業を遂行できないおそれがある。
【0006】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、変化する環境においてロボット装置を適切に動作させることが可能なロボット制御装置、ロボット装置、ロボット制御システム、及びロボット制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、回動する関節または平行移動する関節を有するロボットアームと前記ロボットアームの先端に取り付けられたエンドエフェクタとを備えたロボット装置を制御するロボット制御装置において、前記エンドエフェクタの目標位置を設定し、前記ロボット装置の周囲環境の3次元モデルである環境モデルと前記目標位置とに基づいて前記ロボットアームの動作軌道を計画する軌道計画装置と、前記周囲環境の情報を環境情報として取得する環境センサとを備え、前記軌道計画装置は、前記環境センサが取得した環境情報と前記環境モデルとをマッチングして、前記環境モデルに隣接する領域のうち前記環境センサが環境情報を取得できなかった領域を注意領域として設定し、前記環境モデルと前記目標位置と前記注意領域とに基づいて前記動作軌道を計画し、前記ロボット制御装置は、前記動作軌道に基づいて前記ロボットアームを動作させるものとする。
【0008】
また、本発明は、ロボット装置において、前記ロボット制御装置と、前記ロボットアームと、前記エンドエフェクタとを備えるものとする。
【0009】
また、本発明は、ロボット制御システムにおいて、前記ロボット制御装置と、前記ロボット装置とを備えるものとする。
【0010】
また、本発明は、回動する関節または平行移動する関節を有するロボットアームと前記ロボットアームの先端に取り付けられたエンドエフェクタとを備えたロボット装置を制御するロボット制御方法において、前記ロボット装置の周囲の環境情報を取得する第1ステップと、前記第1ステップで取得した環境情報と前記ロボット装置の周囲環境の3次元モデルである環境モデルとをマッチングして、前記環境モデルに隣接する領域のうち前記環境情報を取得できなかった領域を注意領域として設定する第2ステップと、前記エンドエフェクタの目標位置を設定する第3ステップと、前記環境モデルと前記目標位置と前記注意領域とに基づいて前記ロボットアームの動作軌道を計画する第4ステップと、前記動作軌道に基づいて前記ロボットアームを動作させる第5ステップとを備えるものとする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
今日
日東精工株式会社
電動ドライバ
24日前
トヨタ自動車株式会社
関節機構
29日前
株式会社ダイヘン
移動体
27日前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
15日前
学校法人五島育英会
アーム機構
29日前
株式会社スター精機
吸着パッド
23日前
株式会社スター精機
吸着パッド
23日前
工機ホールディングス株式会社
作業機
15日前
工機ホールディングス株式会社
作業機
15日前
住友重機械工業株式会社
ロボット
1か月前
株式会社アイエイアイ
グリッパー
1か月前
庄内機械株式会社
釘打装置
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
川崎重工業株式会社
制動システム
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
オークラ輸送機株式会社
ハンド装置
8日前
株式会社スター精機
産業用ロボット
21日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
川崎重工業株式会社
ロボットシステム
9日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
28日前
株式会社安川電機
ロボット
21日前
株式会社安川電機
ロボット
21日前
株式会社安川電機
ロボット
21日前
株式会社ジャノメ
ロボット
17日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社ダイヘン
ロボット制御システム
27日前
セイコーエプソン株式会社
ロボット
3日前
小倉クラッチ株式会社
ロボット用ツール交換装置
23日前
セイコーエプソン株式会社
ロボット
23日前
住友重機械工業株式会社
ロボット及びカバー
1か月前
個人
回転移動式工具ホルダ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ