TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094281
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2022025085
出願日
2022-02-21
発明の名称
物体姿勢算出装置および物体姿勢算出方法
出願人
株式会社日立製作所
代理人
青稜弁理士法人
主分類
G06T
7/70 20170101AFI20250618BHJP(計算;計数)
要約
【課題】物流現場でのフォークリフト運搬システムにおいて、荷物を搭載するパレットの姿勢算出の精度を正確にして、フォークリフト等の荷役機器による搬送作業を円滑に行えるようにする。
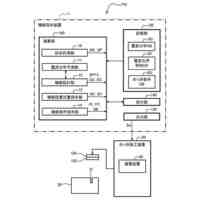
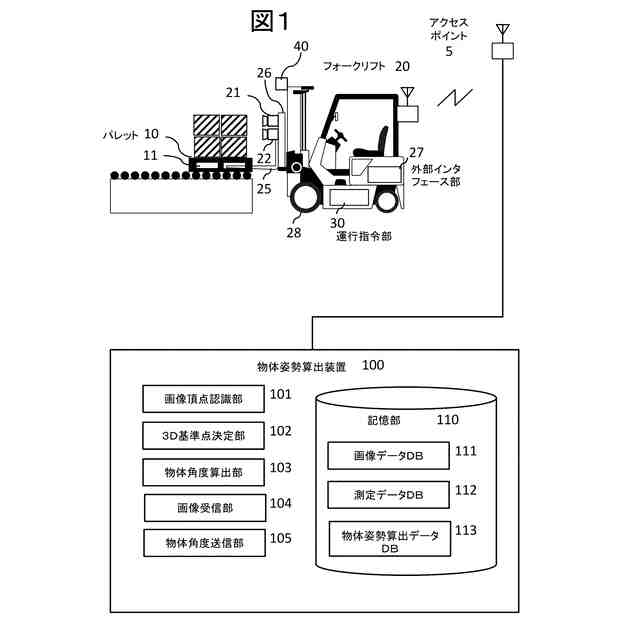
【解決手段】物体姿勢算出装置は、2次元カメラによる2次元画像と、3次元カメラによる3次元画像が入力され、2次元画像より対象物体の複数の頂点を認識する画像頂点認識部と、画像頂点認識部により認識された頂点の座標に基づいて、3次元基準点の3次元座標を決定する3次元基準点決定部と、所定の座標系に対する所定の軸に対して、対象物体の一側面の角度を算出する物体姿勢算出部とを有し、物体姿勢算出部は、3次元座標における頂点の座標と、3次元座標における3次元基準点の制約条件と、2次元画像の性質に基づく頂点の2次元座標と対応する3次元座標の制約条件とに基づいて対象物体の角度を算出する。
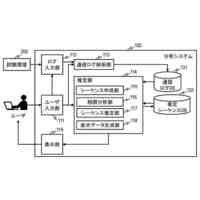
【選択図】 図1
特許請求の範囲
【請求項1】
2次元カメラにより撮像された2次元画像と、3次元カメラにより撮像された3次元画像とを入力して、所定の座標系に対する対象物体の角度を算出する物体姿勢算出装置であって、
前記2次元画像より対象物体の複数の頂点を認識する画像頂点認識部と、
前記画像頂点認識部により認識された頂点の座標に基づいて、3次元基準点の3次元座標を決定する3次元基準点決定部と、
前記所定の座標系に対する所定の軸に対して、前記対象物体の一側面の角度を算出する物体姿勢算出部とを有し、
前記物体姿勢算出部は、3次元座標における頂点の座標と、3次元座標における3次元基準点の制約条件と、前記2次元画像の性質に基づく頂点の2次元座標と対応する3次元座標の制約条件とに基づいて前記角度を算出することを特徴とする物体姿勢算出装置。
続きを表示(約 1,300 文字)
【請求項2】
前記対象物体は、直方体形状をなし、前記画像頂点認識部により認識された頂点は、直方体形状のある側面の四頂点を含むことを特徴とする請求項1記載の物体姿勢算出装置。
【請求項3】
前記3次元基準点は、前記側面の四頂点の対向する互いの2点を結んだ線分の交点に配置されることを特徴する請求項2記載の物体姿勢算出装置。
【請求項4】
前記側面の四頂点の対向する互いの二点を結んだ線分の交点に対して、対向する互いの二点を結んだ第一の線分の長さと、第二の線分の長さの比に基づいて補正された点を、前記3次元基準点とすることを特徴とする請求項2記載の物体姿勢算出装置。
【請求項5】
前記側面の四頂点の対向する互いの二点を結んだ線分の交点を中心とする一定領域に対して、画像データを取得し、前記画像データの3次元座標におけるそれぞれの座標の相加平均をとった値を座標とする点を、前記3次元基準点とすることを特徴とする請求項2記載の物体姿勢算出装置。
【請求項6】
前記対象物体は、パレットであることを特徴とする請求項1記載の物体姿勢算出装置。
【請求項7】
前記対象物体は、パレットであり、前記一定領域は、前記パレットのフォークポケット間のおける矩形領域を含むことを特徴とする請求項5記載の物体姿勢算出装置。
【請求項8】
2次元画像を撮像する2次元カメラと、
3次元画像を撮像する3次元カメラと、
フォークリフトと、
2次元カメラにより撮像された2次元画像と、3次元カメラにより撮像された3次元画像とを入力して、所定の座標系に対する対象物体の角度を算出する物体姿勢算出装置とを備えるフォークリフト運搬システムであって、
前記物体姿勢算出装置が、2次元カメラにより撮像された2次元画像を取得するステップと、
前記物体姿勢算出装置が、3次元カメラにより撮像された3次元画像を取得するステップと、
前記物体姿勢算出装置が、前記2次元画像よりパレットの複数の頂点を認識する画像頂点認識ステップと、
前記物体姿勢算出装置が、前記画像頂点認識部により認識された頂点の座標に基づいて、3次元基準点の3次元座標を決定する3次元基準点決定ステップと、
前記物体姿勢算出装置が、前記所定の座標系に対する所定の軸に対して、前記対象物体の一側面の角度を算出する物体姿勢算出ステップと、
前記所定の座標系に対する所定の軸に対して、前記対象物体の一側面の角度を算出する物体姿勢算出部とを有し、
前記物体姿勢算出装置が、前記フォークリフトに対して算出した角度を送信するステップと、
前記フォークリフトは、送信された角度に基づき前記パレットの運行を行うステップとを有し、
前記物体姿勢算出ステップでは、3次元座標における頂点の座標と、3次元座標における3次元基準点の制約条件と、前記2次元画像の性質に基づく頂点の2次元座標と対応する3次元座標の制約条件とに基づいて前記角度を算出することを特徴とする物体姿勢算出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体姿勢算出装置および物体姿勢算出方法に係り、特に、倉庫等における物流作業において、荷物を搭載するパレットの姿勢算出の精度を正確にして、フォークリフト等の荷役機器による搬送作業を円滑に行うのに好適な物体姿勢算出装置および物体姿勢算出方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年の物流スタイルでは、パレットといわれる荷物を載せるための荷役台とフォークリフトにより、荷物の運搬作業を行うのが一般的である。パレットには、貨物を載せる面の両サイドに差込口(フォークポケット)が設けられており、そこにフォークリフトのツメ(フォーク)を差し込むことによって、上下移動や搬送が容易にでき、効率的な作業が可能となる。
【0003】
このような物流の作業スタイルに鑑み、パレットを画像認識して、位置を把捉して、無人の自動フォークリフトでの運搬や、有人のフォークリフトの運転手の補助を行う技術が提案されている。
【0004】
パレットを画像認識するために、2D画像とデプスカメラなどによる3D点群によりパレットの位置姿勢認識をする技術がある。このような物体の位置姿勢認識において、一般的には、離れた物体上の2点以上のデプス(例えば、左の頂点、右の頂点)を使って認識するが、物流作業の実務においては、現場環境や検出対象物状態により、3D点群の測定品質が低いという問題があり、数少ない測定品質の高い点群を用いて対象物体の位置姿勢認識を認識する必要がある。
【0005】
3D参照点を利用して、物体の位置姿勢を求めるアルゴリズムについては、例えば、非特許文献1に記載がある。この非特許文献1では、3D参照点とそれらの2D平面におけるイメージの位置関係を表す数式が記載されている(§2 THE CAMERA POSE FROM THREE POINTS REVISITED, Fig 1)。
【0006】
また、これに関連して、特許文献1には、デプスカメラにより取得されたデプス画像と、デプス画像から抽出された平面領域に基づいて、物体の位置、姿勢を算出する三次元計測・表示装置が開示されている。
【先行技術文献】
【特許文献】
【0007】
国際公開第2014/147863号公報
【非特許文献】
【0008】
Long Quan, etc. “Linear N-point Camera Pose Determination”, IEEE Transactions on Pattern Analysis and Machine Intelligence, USA, IEEE, Aug 1999, Volume 21, Issue 8, p. 774 - 780
【発明の概要】
【発明が解決しようとする課題】
【0009】
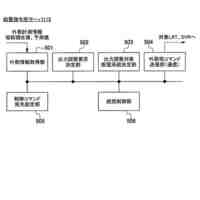
以下、図13を用いて発明が解決しようとする課題について説明する。
【0010】
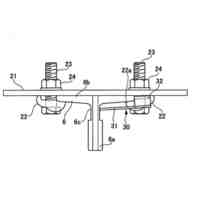
図13は、パレットの斜視図と諸元を説明する図である。
上記で述べたように、現状のデプスカメラの測定の問題により、3D点群の測定品質が低いため、数少ない測定品質の高い点群を用いて対象物体となるパレットの位置姿勢認識を認識することを考える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
回転電機
10日前
株式会社日立製作所
電力変換装置
26日前
株式会社日立製作所
エレベーター
4日前
株式会社日立製作所
コントローラー
18日前
株式会社日立製作所
回転子および回転電機
20日前
株式会社日立製作所
調速機及びエレベーター
25日前
株式会社日立製作所
分析システム及び分析方法
4日前
株式会社日立製作所
エレベーター及び保護カバー
2日前
株式会社日立製作所
情報提供装置及び情報提供方法
20日前
株式会社日立製作所
生産計画立案支援装置及び方法
20日前
株式会社日立製作所
めっき装置及びめっき形成方法
10日前
株式会社日立製作所
プリント配線基板、電力変換装置
26日前
株式会社日立製作所
振動解析装置および振動解析方法
24日前
株式会社日立製作所
補修指示装置および補修指示方法
3日前
株式会社日立製作所
状態診断システム及び状態診断方法
1か月前
株式会社日立製作所
脱レール検出装置及びエレベーター
24日前
株式会社日立製作所
計測装置及びエレベーターシステム
1か月前
株式会社日立製作所
計算機システム及びデータ抽出方法
20日前
株式会社日立製作所
多重系制御システム及び周期管理方法
25日前
株式会社日立製作所
巻線切替回転電機および電動システム
20日前
株式会社日立製作所
水素の混焼を制御する装置および方法
3日前
株式会社日立製作所
劣化要因推定装置、劣化要因診断方法
25日前
株式会社日立製作所
判定システム、判定装置、及び判定方法
10日前
株式会社日立製作所
計算機システム及び教育資料の生成方法
27日前
株式会社日立製作所
電力系統制御装置及び電力系統制御方法
2日前
株式会社日立製作所
保守最適化システムおよび保守最適化装置
18日前
株式会社日立製作所
支援装置、支援方法、及び支援プログラム
4日前
株式会社日立製作所
運転計画支援装置、及び運転計画支援方法
24日前
株式会社日立製作所
ビル清掃管理システム及びビル清掃管理方法
3日前
株式会社日立製作所
電力管理システム、および、電力供給システム
19日前
株式会社日立製作所
エレベータの安全システム、並びにエレベータ
17日前
株式会社日立製作所
システム、システムが実行する方法、プログラム
17日前
株式会社日立製作所
エネルギ運用計画装置及びエネルギ運用計画方法
4日前
株式会社日立製作所
二次電池の状態判定装置及び二次電池の診断方法
3日前
株式会社日立製作所
通信リソース配分装置及び通信リソース配分方法
17日前
株式会社日立製作所
業務プロセス管理装置及び業務プロセス管理方法
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ