TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025093573
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209313
出願日
2023-12-12
発明の名称
飛行体誘導システム、飛行体、飛行体管理装置および飛行体誘導方法
出願人
株式会社日立製作所
代理人
弁理士法人磯野国際特許商標事務所
主分類
G08G
5/00 20250101AFI20250617BHJP(信号)
要約
【課題】無人航空機の高精度な誘導を可能とする。
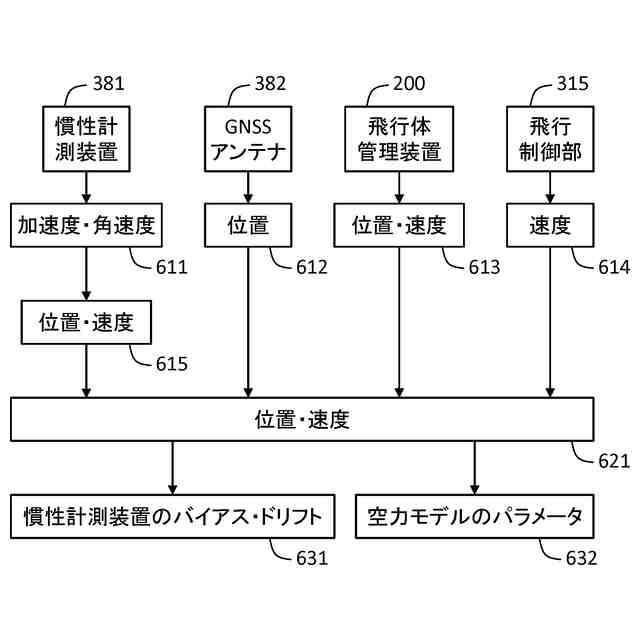
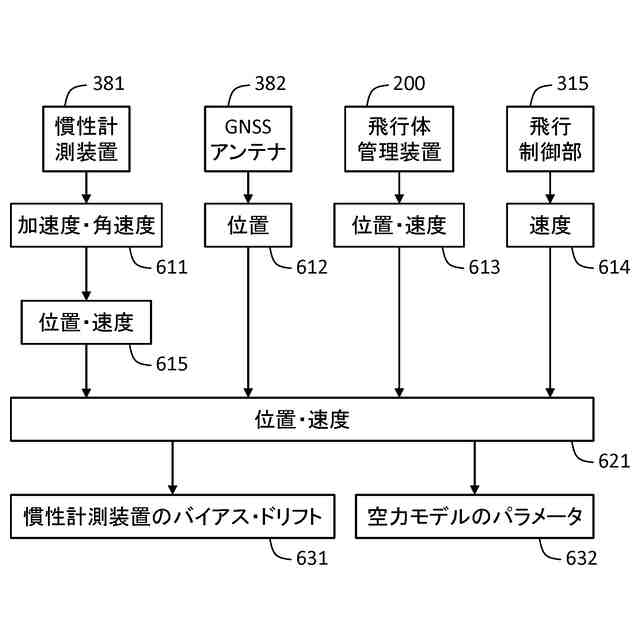
【解決手段】飛行体誘導システムは、地上に設置されたカメラおよびレーダの少なくとも何れか一方の出力を基に飛行体の位置または速度である地上測定位置速度(位置・速度613参照)を算出する飛行体検出部と、飛行体に搭載される慣性計測装置381の出力値を基に当該飛行体の位置または速度である飛行体測定位置速度(位置・速度615参照)を算出する位置算出部と、地上測定位置速度と飛行体測定位置速度とを基に、慣性計測装置381のバイアスおよびドリフト(慣性計測装置381のバイアス・ドリフト631参照)の少なくとも一方を算出する慣性計測装置補正部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
地上に設置されたカメラおよびレーダの少なくとも何れか一方の出力を基に飛行体の位置または速度である地上測定位置速度を算出する飛行体検出部と、
前記飛行体に搭載される慣性計測装置の出力値を基に当該飛行体の位置または速度である飛行体測定位置速度を算出する位置算出部と、
前記地上測定位置速度と前記飛行体測定位置速度とを基に、前記慣性計測装置のバイアスおよびドリフトのうち少なくとも何れか一方を算出する慣性計測装置補正部と、を備える
飛行体誘導システム。
続きを表示(約 1,100 文字)
【請求項2】
前記慣性計測装置補正部は、
前記地上測定位置速度に替わり衛星測位を用いた前記飛行体の位置である衛星測位位置と、前記飛行体測定位置速度とを基に、前記慣性計測装置のバイアスまたはドリフトを算出する
請求項1に記載の飛行体誘導システム。
【請求項3】
前記位置算出部は、
前記地上測定位置速度および衛星測位を用いた前記飛行体の位置である衛星測位位置の少なくとも何れか一方と、前記慣性計測装置の出力値とを基に、所定の手法を用いて前記飛行体測定位置速度を算出する
請求項1に記載の飛行体誘導システム。
【請求項4】
前記所定の手法は、カルマンフィルタである
請求項3に記載の飛行体誘導システム。
【請求項5】
前記飛行体の推進力を生む推力装置はプロペラを有するものであり、
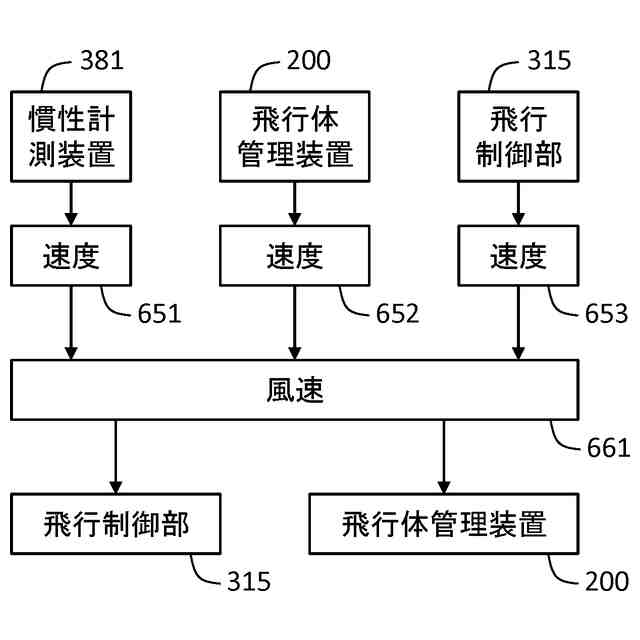
前記飛行体の空力モデルおよび当該飛行体の推進力を生む前記プロペラの回転速度を基に算出される理論値速度と、前記地上測定位置速度とを基に、当該飛行体周辺の風速を算出する環境値算出部を備える
請求項1に記載の飛行体誘導システム。
【請求項6】
前記風速を基に、前記飛行体が飛行予定経路に沿って飛行するように前記プロペラの回転速度を制御する飛行制御部を備える
請求項5に記載の飛行体誘導システム。
【請求項7】
風速計が計測した風速、前記プロペラの回転速度、前記地上測定位置速度を基に、前記飛行体の空力モデルのパラメータを算出するモデルパラメータ算出部を備える
請求項5に記載の飛行体誘導システム。
【請求項8】
前記バイアスは、前記慣性計測装置の出力値の誤差である
請求項1に記載の飛行体誘導システム。
【請求項9】
前記ドリフトは、前記慣性計測装置の出力値の誤差における時間変化または標準偏差である
請求項1に記載の飛行体誘導システム。
【請求項10】
地上に設置されたカメラおよびレーダの少なくとも何れか一方の出力を基に算出された自身の位置または速度である地上測定位置速度を受信する通信部と、
搭載された慣性計測装置の出力値を基に自身の位置または速度である飛行体測定位置速度を算出する位置算出部と、
前記地上測定位置速度と前記飛行体測定位置速度とを基に、前記慣性計測装置のバイアスおよびドリフトのうち少なくとも何れか一方を算出する慣性計測装置補正部と、を備える
飛行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人航空機を誘導する飛行体誘導システム、飛行体、飛行体管理装置および飛行体誘導方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
無人航空機の普及や改正航空法施行による目視外自動飛行の解禁などにともない、都市部を含め無人航空機を用いた物品配送の普及が見込まれている。安全であり、法規制を順守した無人航空機の利用には、無人航空機を正確に誘導することが必要である。無人航空機の誘導システムとして、特許文献1に記載の自律移動制御システムがある。
【0003】
この自律移動制御システムは、走行装置と、無線通信可能な無人航空機とを含む。当該無人航空機は移動する場合に自律移動制御を行う。前記走行装置は、前記無人航空機を撮像する撮像手段と、前記撮像手段により撮像された無人航空機から、無人航空機の位置情報または方位情報を決定する決定手段と、前記無人航空機の位置情報または方位情報を制御信号として、前記無人航空機に送信する送信手段と、を備える。前記無人航空機は、前記制御信号を前記走行装置から受信する受信手段と、前記受信された制御信号に基づいて、無人航空機の自律移動制御を行う移動制御手段と、を備える。
【先行技術文献】
【特許文献】
【0004】
特開2018-005914号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の自律移動制御システムによれば、無人航空機は、受信した制御信号に基づいて、自律移動制御を行うことができる。しかしながら、雨天や雲が多い場合には、無人航空機が背景に紛れてしまうため、走行装置においてカメラ画像による無人航空機の位置情報や方位情報を高精度に決定するのは難しく、正確な自律移動制御は困難になる可能性がある。
本発明は、このような背景に鑑みてなされたものであり、無人航空機の高精度な誘導を可能とする飛行体誘導システム、飛行体、飛行体管理装置および飛行体誘導方法を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記した課題を解決するため、本発明に係る飛行体誘導システム装置は、地上に設置されたカメラおよびレーダの少なくとも何れか一方の出力を基に飛行体の位置または速度である地上測定位置速度を算出する飛行体検出部と、前記飛行体に搭載される慣性計測装置の出力値を基に当該飛行体の位置または速度である飛行体測定位置速度を算出する位置算出部と、前記地上測定位置速度と前記飛行体測定位置速度とを基に、前記慣性計測装置のバイアスおよびドリフトのうち少なくとも何れか一方を算出する慣性計測装置補正部と、を備える。
【発明の効果】
【0007】
本発明によれば、無人航空機の高精度な誘導を可能とする飛行体誘導システム、飛行体、飛行体管理装置および飛行体誘導方法を提供することができる。上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0008】
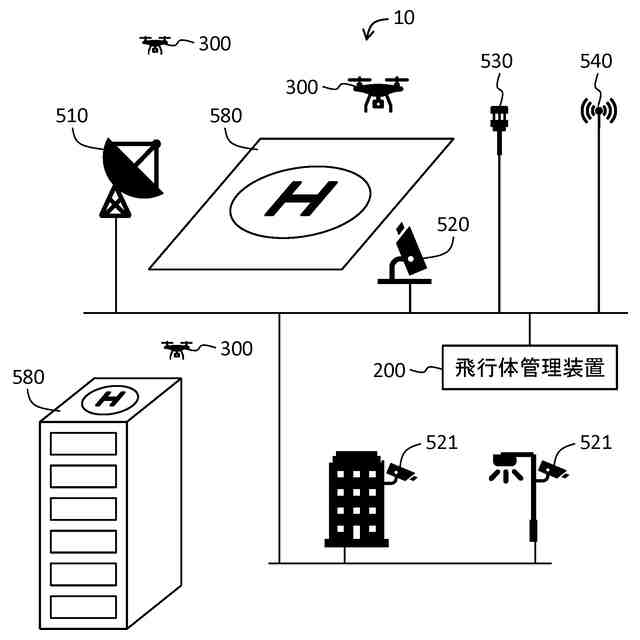
本実施形態に係る飛行体誘導システムの全体構成を示す図である。
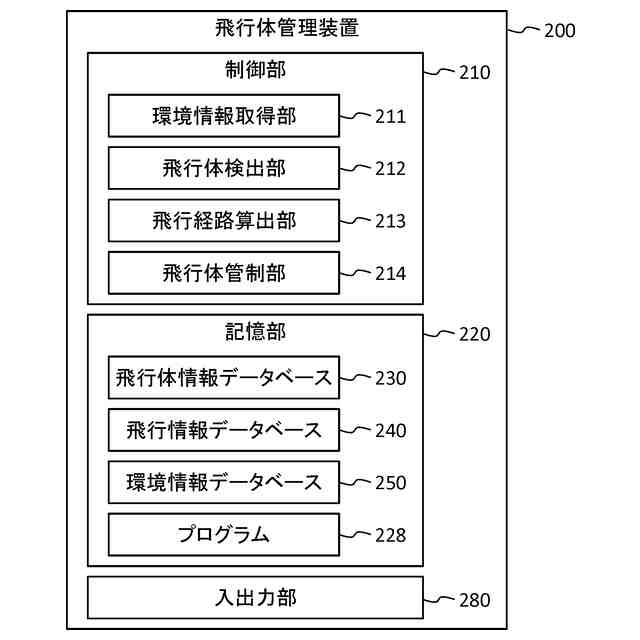
本実施形態に係る飛行体管理装置の機能ブロック図である。
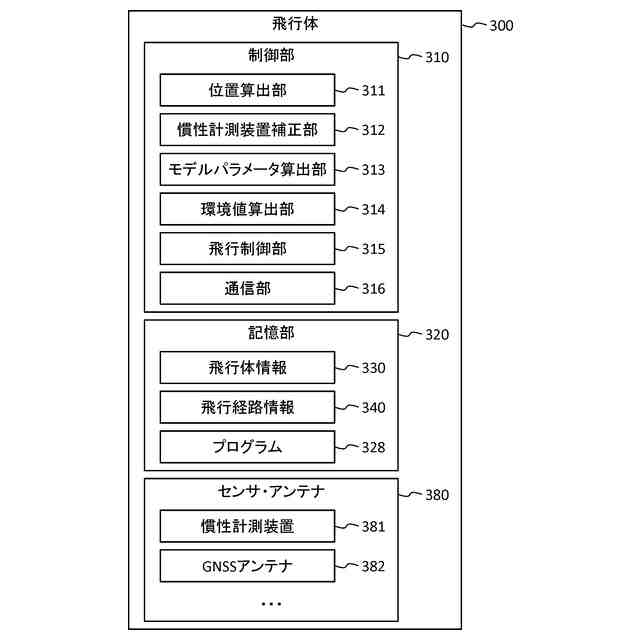
本実施形態に係る飛行体の機能ブロック図である。
本実施形態に係る飛行体の制御部の処理内容を説明するための図である。
本実施形態に係る飛行体の制御部の処理内容を説明するための図である。
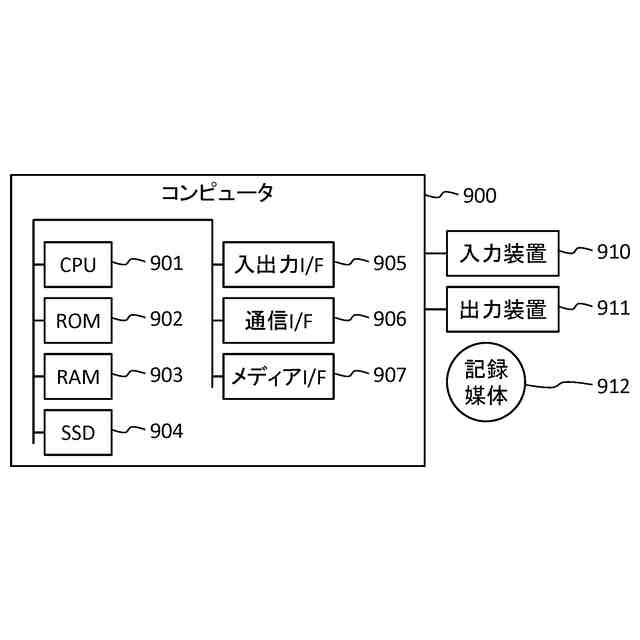
上記した実施形態に係る飛行体管理装置および飛行体の機能を実現するコンピュータの一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0009】
≪飛行体誘導システムの概要≫
以下に本発明を実施するための形態(実施形態)における飛行体誘導システムについて説明する。飛行体誘導システムは、飛行体、および飛行体を誘導、管制して飛行を管理する飛行体管理装置を含んで構成される。飛行体管理装置は、レーダやカメラを用いて飛行体の位置・速度を検出して、当該飛行体に送信する。
【0010】
飛行体は、搭載する慣性計測装置の出力値(加速度・角速度)や衛星測位による位置、飛行体管理装置から受信した位置・速度を基に、自身の位置・速度を算出する。
また飛行体は、慣性計測装置の出力値から算出される位置・速度と、飛行体管理装置から受信した位置・速度とを基に、慣性計測装置のバイアス・ドリフトを算出して、補正に用いる。
なお、慣性計測装置を用いることで飛行体は、山間部などの他、高層ビルや橋梁などにより衛星を見通せない場所でも、自身の位置を把握可能である。また位置の単位時間当りの変化が速度である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ