TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025093102
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208627
出願日
2023-12-11
発明の名称
車線境界線検出方法及び車線境界線検出装置
出願人
日産自動車株式会社
代理人
弁理士法人とこしえ特許事務所
主分類
B60W
40/072 20120101AFI20250616BHJP(車両一般)
要約
【課題】車線境界線を効率的に検出できる車線境界線検出方法及び車線境界線検出装置を提供する。
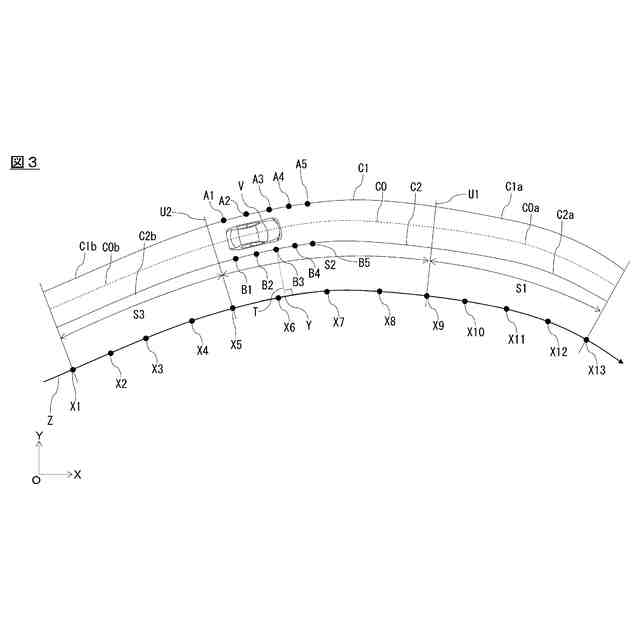
【解決手段】車両Vが走行している道路の車線境界線を示す対象物の特徴点の位置情報を取得し、道路を表し、接線の傾きが連続的に変化する参照線Zに対する特徴点の相対位置から車線境界線を検出する。
【選択図】図3
特許請求の範囲
【請求項1】
車両の制御器により実行される車線境界線検出方法において、
前記制御器は、
前記車両が走行している道路の車線境界線を示す対象物の特徴点の位置情報を取得し、
前記道路を表し、接線の傾きが連続的に変化する参照線に対する前記特徴点の相対位置から前記車線境界線を検出する、車線境界線検出方法。
続きを表示(約 1,600 文字)
【請求項2】
前記制御器は、
前記車両に搭載された撮像装置により取得された画像から、地図情報に用いるグローバル座標系における前記位置情報を取得し、
前記参照線に沿ったローカル座標系における前記位置情報から前記車線境界線を検出する場合に、前記位置情報の座標系を、前記グローバル座標系から前記ローカル座標系に変換し、
前記ローカル座標系における前記位置情報と、前記参照線の前記接線の傾きとに基づき、前記車線境界線の形状を近似する第1近似線を生成し、
前記グローバル座標系における前記第1近似線に基づいて前記車線境界線を検出する、請求項1に記載の車線境界線検出方法。
【請求項3】
前記制御器は、
前記参照線上の所定の第1位置から、前記参照線において前記特徴点に最も近い第2位置までの前記参照線の長さと、前記第2位置から前記特徴点までの距離とを用いて前記相対位置を表す場合は、前記参照線上に配置された隣り合う2つのノードにより区切られる区間のうち、前記第2位置が含まれる対象区間を特定し、
前記対象区間に対して数値解析を実行して前記第2位置を算出する、請求項1又は2に記載の車線境界線検出方法。
【請求項4】
前記制御器は、
前記特徴点が、前記参照線に対して前記車両と同じ側に存在するか否かを判定し、
前記特徴点が、前記参照線に対して前記車両と同じ側に存在すると判定した場合は、前記第2位置から前記特徴点までの距離を正の値で表し、
前記特徴点が、前記参照線に対して前記車両と同じ側に存在しないと判定した場合は、前記第2位置から前記特徴点までの距離を負の値で表す、請求項3に記載の車線境界線検出方法。
【請求項5】
前記参照線は、地図上に配置された複数のノードに対する多項式補完により生成された線である、請求項1又は2に記載の車線境界線検出方法。
【請求項6】
前記参照線の情報は、地図情報に含まれている、請求項1又は2に記載の車線境界線検出方法。
【請求項7】
前記参照線は、前記車両及び/又は前記車両以外の他車両が走行した場合の走行履歴の情報に基づいて生成された線である、請求項1又は2に記載の車線境界線検出方法。
【請求項8】
前記制御器は、
前記相対位置から前記車線境界線を検出する場合に、前記道路を、前記車両が存在する走行区間と、前記走行区間に隣接し、前記車両の進行方向前方に存在する前方区間と、前記走行区間に隣接し、前記車両の進行方向後方に存在する後方区間とに区切り、
前記走行区間、前記前方区間及び前記後方区間のそれぞれにおいて、前記車線境界線の形状を近似する第2近似線を生成し、
前記第2近似線から前記車線境界線を検出する、請求項1又は2に記載の車線境界線検出方法。
【請求項9】
前記制御器は、
前記第2近似線を生成する場合に、前記走行区間と前記前方区間の境界及び前記走行区間と前記後方区間の境界では、隣接する2つの区画の前記第2近似線が同じ値を有し、接線の傾きが連続し、曲率が連続するとみなす、請求項8に記載の車線境界線検出方法。
【請求項10】
前記制御器は、前記参照線上の所定の第1位置から、前記参照線において前記特徴点に最も近い第2位置までの前記参照線の長さと、前記第2位置から前記特徴点までの距離とを用いて前記相対位置を表す場合は、前記走行区間、前記前方区間及び前記後方区間のそれぞれにおいて、前記第2位置における前記参照線の接線の傾きと、前記第2近似線の、前記第2位置に対応する位置における接線の傾きとが一致するとみなす、請求項8に記載の車線境界線検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車線境界線検出方法及び車線境界線検出装置に関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
走路境界を示す特徴点から、走路境界の形状を近似した第1走路形状を算出し、第1走路形状において特徴点との一致度が悪化する悪化位置を検出し、悪化位置より遠方の走路境界の形状を近似した第2走路形状を算出し、悪化位置より近方の走路境界を第1走路形状により認識し、悪化位置より遠方の走路境界を第2走路形状により認識する走路形状認識装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2018-5617号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、車線境界線のような走路境界の形状を近似した走路形状の算出を、悪化位置を検出する前と、悪化位置を検出した後とに実行するため、走路境界を効率的に検出できないという問題がある。
【0005】
本発明が解決しようとする課題は、車線境界線を効率的に検出できる車線境界線検出方法及び車線境界線検出装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、車両が走行している道路の車線境界線を示す対象物の特徴点の位置情報を取得し、道路を表し、接線の傾きが連続的に変化する参照線に対する特徴点の相対位置から車線境界線を検出することによって上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、車線境界線を効率的に検出できる。
【図面の簡単な説明】
【0008】
本発明に係る運転支援システムの実施形態の一例を示すブロック図である。
図1の運転支援システムにて運転支援を実行する走行シーンの一例を示す平面図である。
図2の走行シーンにおいて取得される特徴点と、図2の道路の参照線の一例を示す平面図である。
図1の運転支援システムにおける処理手順の一例を示すフローチャートである。
図1の運転支援システムにおける処理手順の他の例を示すフローチャートである。
図5のステップS15のサブルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。
【0010】
[運転支援システムの構成]
図1は、本発明に係る運転支援システムの実施形態の一例を示すブロック図である。運転支援システムは、車両の運転支援を実行する装置群であり、運転支援には、自律走行制御により車両を走行させることと、車両の運転者に情報を提示して運転者の運転操作を支援することとが含まれる。例えば、運転支援システムは、乗員が設定した目的地までの走行経路を生成し、走行経路に沿って車両を自律走行させる。運転支援システムは、車載システムであってもよく、構成機器の一部が車外に設けられていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
車窓用防虫網戸
1か月前
個人
警告装置
2か月前
個人
小型EVシステム
2か月前
個人
ホイルのボルト締結
7日前
個人
車輪清掃装置
1か月前
井関農機株式会社
作業車両
29日前
個人
キャンピングトライク
22日前
井関農機株式会社
作業車両
27日前
個人
キャンピングトレーラー
22日前
個人
車両用スリップ防止装置
13日前
個人
ワイパーゴム性能保持具
1か月前
個人
アクセルのソフトウェア
12日前
井関農機株式会社
収穫作業車両
1か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
個人
車載小物入れ兼雨傘収納具
5日前
日本精機株式会社
車載表示装置
8日前
株式会社ニフコ
保持装置
6日前
井関農機株式会社
作業車両
19日前
日本精機株式会社
車両用表示装置
13日前
日本精機株式会社
車両用投影装置
29日前
日本精機株式会社
車両用投影装置
29日前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
26日前
井関農機株式会社
作業車両
19日前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
エムケー精工株式会社
車両処理装置
1か月前
トヨタ自動車株式会社
運搬車両
20日前
株式会社クボタ
作業車両
7日前
ダイハツ工業株式会社
車両構造
2か月前
豊田合成株式会社
乗員保護装置
21日前
AGC株式会社
車両用窓ガラス
1か月前
AGC株式会社
車両用窓ガラス
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ