TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092018
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207635
出願日
2023-12-08
発明の名称
車両走行支援装置及び車両走行支援方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/16 20200101AFI20250612BHJP(車両一般)
要約
【課題】自車両と対象物との間の距離、及び自車両の速度を制御する際に、自車両に発生するジャーク及びジャーク変化率を低減できると共に、走行距離の増大を抑制することができる車両走行支援装置及び車両走行支援方法を提供する。
【解決手段】自車両の目標速度と、自車両と対象物との間の距離の目標距離と、を設定し、仮想時間において、目標距離に対して、第1フィルタ、第2フィルタ、第3フィルタ、及び第4フィルタからなる4段フィルタ処理を行って、将来の各時刻の過渡的な目標距離である距離計画を演算し、距離計画及び目標速度に基づいて、将来の各時刻の過渡的な目標速度である速度計画を演算し、少なくとも速度計画に基づいて、自車両の加速度指令値を演算し、加速度指令値に基づいて、自車両を制御する車両走行支援装置。
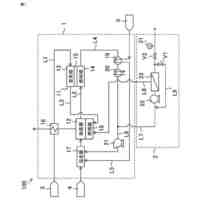
【選択図】図1
特許請求の範囲
【請求項1】
自車両の情報と、前記自車両の周辺に存在する対象物の情報とを取得する情報取得部と、
前記自車両の情報及び前記対象物の情報に基づいて、前記自車両の目標速度と、前記自車両と前記対象物との間の距離の目標値である目標距離と、を設定する目標決定部と、
前記目標距離に基づいて、前記距離が前記目標距離に到達し、且つ前記自車両の速度が前記目標速度に到達する到達時間までの将来の各時刻の過渡的な目標距離である距離計画を演算するとともに、前記距離計画及び前記目標速度に基づいて、将来の各時刻の過渡的な目標速度である速度計画を演算する計画生成部と、
少なくとも前記速度計画に基づいて、前記自車両の加速度指令値を演算し、前記加速度指令値に基づいて、前記自車両を制御する車両制御部と、を備え、
前記計画生成部は、現在から前記到達時間までの将来の各時刻を表す仮想時間において、前記目標距離に対して、第1フィルタ、第2フィルタ、第3フィルタ、及び第4フィルタからなる4段フィルタ処理を行って、前記距離計画を演算する車両走行支援装置。
続きを表示(約 1,300 文字)
【請求項2】
前記対象物は、前記自車両が走行している走行車線の前方又は後方を走行している他車両である請求項1に記載の車両走行支援装置。
【請求項3】
前記対象物は、前記自車両の移動先の車線を走行している他車両である請求項1に記載の車両走行支援装置。
【請求項4】
前記対象物は、前記自車両の前方に存在する停止位置である請求項1に記載の車両走行支援装置。
【請求項5】
前記第1フィルタ、前記第2フィルタ、前記第3フィルタ、及び前記第4フィルタのそれぞれは、移動平均フィルタであり、前記第1フィルタの時定数である第1時定数、前記第2フィルタの時定数である第2時定数、前記第3フィルタの時定数である第3時定数、及び前記第4フィルタの時定数である第4時定数のそれぞれは、前記移動平均フィルタの移動平均時間である請求項1に記載の車両走行支援装置。
【請求項6】
前記計画生成部は、前記第1フィルタの時定数である第1時定数、前記第2フィルタの時定数である第2時定数、前記第3フィルタの時定数である第3時定数、及び前記第4フィルタの時定数である第4時定数の合計値が、目標とする前記到達時間に一致するように、前記到達時間に基づいて、前記第1時定数、前記第2時定数、前記第3時定数、及び前記第4時定数を設定する請求項1から5のいずれか一項に記載の車両走行支援装置。
【請求項7】
前記計画生成部は、前記第1フィルタの時定数である第1時定数、前記第2フィルタの時定数である第2時定数、前記第3フィルタの時定数である第3時定数、及び前記第4フィルタの時定数である第4時定数の合計値を、前記到達時間として設定する請求項1から5のいずれか一項に記載の車両走行支援装置。
【請求項8】
前記計画生成部は、前記第1フィルタの時定数である第1時定数、前記第2フィルタの時定数である第2時定数、前記第3フィルタの時定数である第3時定数、及び前記第4フィルタの時定数である第4時定数を同じ値に設定する請求項1から5のいずれか一項に記載の車両走行支援装置。
【請求項9】
前記自車両の速度に関する速度情報、前記距離に関する距離情報、前記目標速度、及び前記目標距離に基づいて、前記第1フィルタの時定数である第1時定数、前記第2フィルタの時定数である第2時定数、前記第3フィルタの時定数である第3時定数、及び前記第4フィルタの時定数である第4時定数を設定する計画設計部を更に備えた請求項1から5のいずれか一項に記載の車両走行支援装置。
【請求項10】
前記計画設計部は、前記速度計画を3階時間微分して得られる、将来の各時刻のジャーク変化率の絶対値の最大値が、目標最大ジャーク変化率に一致すると共に、前記速度計画を2階時間微分して得られる、将来の各時刻のジャークの絶対値の最大値が、目標最大ジャークに一致するように、前記第1時定数、前記第2時定数、前記第3時定数、及び前記第4時定数の内、1番小さい時定数を設定する請求項9に記載の車両走行支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この本開示は、車両走行支援装置及び車両走行支援方法に関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来より、自車両前方の他車両を認識し、走行車速に基づき車間距離を維持し、他車両がいない場合は設定した車速にて定速走行するような追従制御装置が実用化されている。特許文献1の技術では、軌道生成部は、特許文献1の図12に示されているような目標速度を計画し、走行制御部で速度パターンに追従するように制御する。
【先行技術文献】
【特許文献】
【0003】
特許第6327424号
特許第5929885号
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の車両制御システムでは、計画する目標速度は等加速度運動で構成されるため、加減速開始時等においてジャークおよびジャーク変化率の急変が発生して乗り心地が低下する。また、車両制御部でジャーク急変・ジャーク変化率が急変しないように制御すると、本来の走行計画からの乖離が発生し、先行車に過剰に接近する可能性がある。
【0005】
そこで、本開示は、自車両と対象物との間の距離、及び自車両の速度を制御する際に、自車両に発生するジャーク及びジャーク変化率を低減できると共に、走行距離の増大を抑制することができる車両走行支援装置及び車両走行支援方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る車両走行支援装置は、
自車両の情報と、前記自車両の周辺に存在する対象物の情報とを取得する情報取得部と、
前記自車両の情報及び前記対象物の情報に基づいて、前記自車両の目標速度と、前記自車両と前記対象物との間の距離の目標値である目標距離と、を設定する目標決定部と、
前記目標距離に基づいて、前記距離が前記目標距離に到達し、且つ前記自車両の速度が前記目標速度に到達する到達時間までの将来の各時刻の過渡的な目標距離である距離計画を演算するとともに、前記距離計画及び前記目標速度に基づいて、将来の各時刻の過渡的な目標速度である速度計画を演算する計画生成部と、
少なくとも前記速度計画に基づいて、前記自車両の加速度指令値を演算し、前記加速度指令値に基づいて、前記自車両を制御する車両制御部と、を備え、
前記計画生成部は、現在から前記到達時間までの将来の各時刻を表す仮想時間において、前記目標距離に対して、第1フィルタ、第2フィルタ、第3フィルタ、及び第4フィルタからなる4段フィルタ処理を行って、前記距離計画を演算するものである。
【0007】
本開示に係る車両走行支援方法は、
自車両の情報と、前記自車両の周辺に存在する対象物の情報とを取得する情報取得ステップと、
前記自車両の情報及び前記対象物の情報に基づいて、前記自車両の目標速度と、前記自車両と前記対象物との間の距離の目標値である目標距離と、を設定する目標決定ステップと、
前記目標距離に基づいて、前記距離が前記目標距離に到達し、且つ前記自車両の速度が前記目標速度に到達する到達時間までの将来の各時刻の過渡的な目標距離である距離計画を演算するとともに、前記距離計画及び前記目標速度に基づいて、将来の各時刻の過渡的な目標速度である速度計画を演算する計画生成ステップと、
少なくとも前記速度計画に基づいて、前記自車両の加速度指令値を演算し、前記加速度指令値に基づいて、前記自車両を制御する車両制御ステップと、を備え、
前記計画生成ステップでは、現在から前記到達時間までの将来の各時刻を表す仮想時間において、前記目標距離に対して、第1フィルタ、第2フィルタ、第3フィルタ、及び第4フィルタからなる4段フィルタ処理を行って、前記距離計画を演算するものである。
【発明の効果】
【0008】
本開示に係る車両走行支援装置及び車両走行支援方法によれば、4段フィルタ処理を用いることにより、目標距離及び目標速度に到達するまでの加減速において、自車両に発生するジャーク及びジャーク変化率を低減することができ、自車両の乗り心地を向上できる。また、到達時間を管理することで、目標距離及び目標速度に到達するまでの走行距離が増大することを防止できる。
【図面の簡単な説明】
【0009】
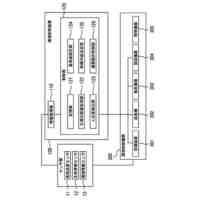
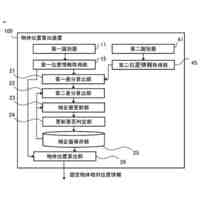
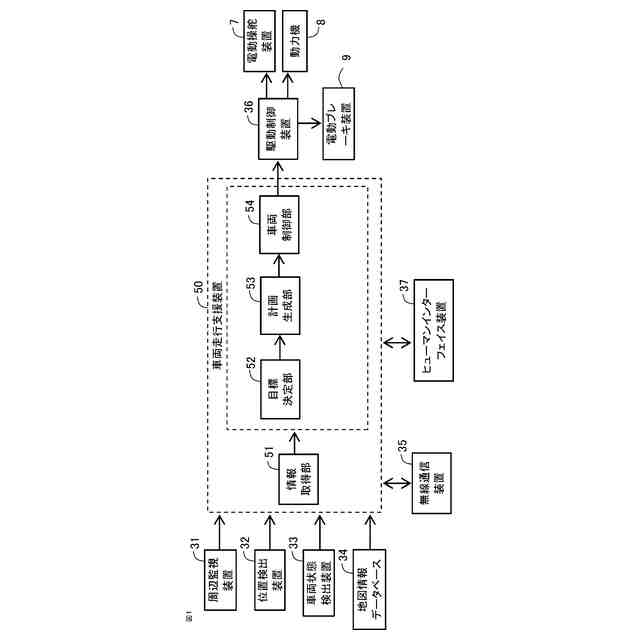
実施の形態1に係る車両走行支援装置の概略ブロック図である。
実施の形態1に係る車両走行支援装置の概略ハードウェア構成図である。
実施の形態1に係る対象物の設定を説明するための図である。
実施の形態1に係る対象物の設定を説明するための図である。
実施の形態1に係る第1フィルタの処理を説明するためのタイムチャートである。
実施の形態1に係る第2フィルタの処理を説明するためのタイムチャートである。
実施の形態1に係る第3フィルタの処理を説明するためのタイムチャートである。
実施の形態1に係る第4フィルタの処理を説明するためのタイムチャートである。
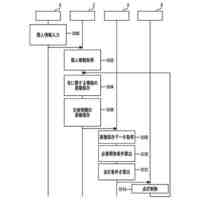
実施の形態1に係る車両走行支援装置の概略的な処理を説明するためのフローチャートである。
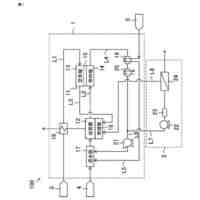
実施の形態2に係る車両走行支援装置の概略ブロック図である。
実施の形態2に係る対象物の設定を説明するための図である。
実施の形態2に係る4段フィルタ処理及び時定数の設定を説明するためのタイムチャートである。
実施の形態2に係る4段フィルタ処理及び時定数の設定を説明するためのタイムチャートである。
実施の形態2に係る車両走行支援装置の概略的な処理を説明するためのフローチャートである。
実施の形態3に係る車両走行支援装置の概略ブロック図である。
実施の形態3に係る4段フィルタ処理及び時定数の設定を説明するためのタイムチャートである。
実施の形態3に係る車両走行支援装置の概略的な処理を説明するためのフローチャートである。
実施の形態4に係る対象物の設定を説明するための図である。
【発明を実施するための形態】
【0010】
1.実施の形態1
実施の形態1に係る車両走行支援装置50について図面を参照して説明する。本実施の形態では、車両走行支援装置50は、自車両に設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
10日前
三菱電機株式会社
照明装置
1日前
三菱電機株式会社
送風装置
10日前
三菱電機株式会社
照明装置
2日前
三菱電機株式会社
照明装置
2日前
三菱電機株式会社
照明器具
10日前
三菱電機株式会社
束線器具
4日前
三菱電機株式会社
照明器具
4日前
三菱電機株式会社
漏電遮断器
8日前
三菱電機株式会社
半導体装置
2日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
空調システム
9日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
電力変換装置
4日前
三菱電機株式会社
ゲート駆動装置
8日前
三菱電機株式会社
燃料電池システム
15日前
三菱電機株式会社
燃料電池システム
3日前
三菱電機株式会社
照明制御システム
16日前
三菱電機株式会社
物体位置算出装置
8日前
三菱電機株式会社
照明システム及び照明器具
9日前
三菱電機株式会社
アンテナ及び送受信モジュール
8日前
三菱電機株式会社
表示操作装置及び表示操作方法
8日前
三菱電機株式会社
電力用半導体装置及びその製造方法
15日前
三菱電機株式会社
負荷制御装置及び直流配電システム
8日前
三菱電機株式会社
直流電源システムおよび電源システム
8日前
三菱電機株式会社
半導体装置及び半導体装置の製造方法
8日前
三菱電機株式会社
車両走行支援装置及び車両走行支援方法
8日前
三菱電機株式会社
充電装置、充電システムおよび制御方法
15日前
三菱電機株式会社
固定子、固定子の製造方法、及びモータ
1日前
三菱電機株式会社
系統安定化システムおよび系統安定化方法
1日前
三菱電機株式会社
快眠システム、推論装置、および学習装置
1日前
三菱電機株式会社
無線通信装置、予測装置、及び通信制御システム
2日前
三菱電機株式会社
誘導加熱コイル及びそれを備えた誘導加熱調理器
9日前
三菱電機株式会社
照明装置
8日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
不動産評価装置、不動産評価方法、および不動産評価プログラム
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ