TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092019
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207636
出願日
2023-12-08
発明の名称
物体位置算出装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01C
21/30 20060101AFI20250612BHJP(測定;試験)
要約
【課題】複雑な演算を不要とし、自己位置精度情報を求めることなく、複数の識別器によって識別された外部の物体の相対位置情報を得る
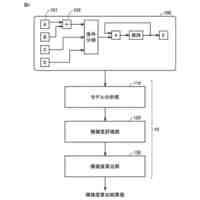
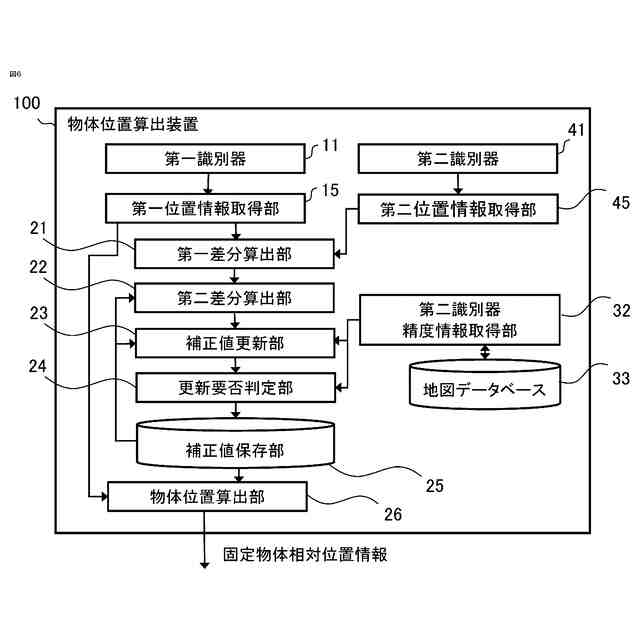
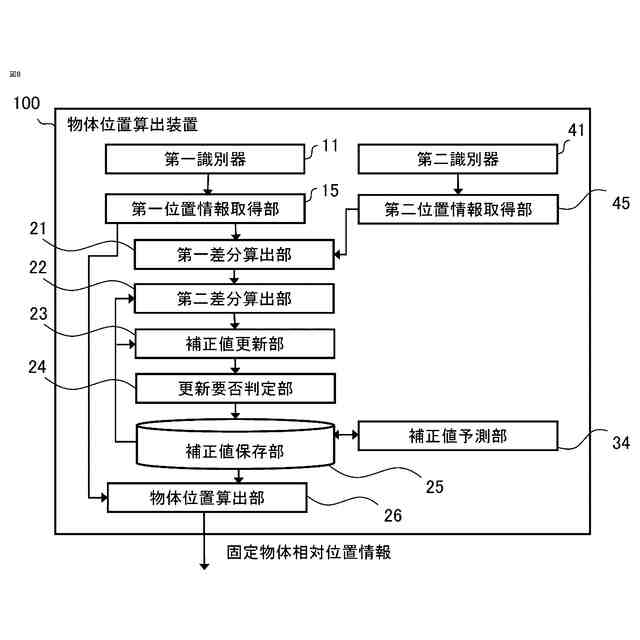
【解決手段】物体位置算出装置は、固定物体を識別する第一識別器、第一の相対位置情報を取得する第一位置情報取得部、固定物体を識別する第二識別器、第二の相対位置情報を取得する第二位置情報取得部、第二の相対位置情報と第一の相対位置情報との差分値を算出する第一差分算出部、第一の位置情報の差分値と、位置情報の補正値との差分値を算出する第二差分算出部、第二の位置情報の差分値に基づいて位置情報の補正値を更新する補正値更新部、および、更新された補正値に基づいて第一の相対位置情報を補正して固定物体の相対位置情報を算出する物体位置算出部、を備えたものである。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の外部に存在する固定物体を識別する第一識別器、
前記第一識別器によって識別された前記固定物体と前記移動体との間の第一の相対位置情報を取得する第一位置情報取得部、
前記固定物体を識別する第二識別器、
前記第二識別器によって識別された前記固定物体と前記移動体との間の第二の相対位置情報を取得する第二位置情報取得部、
前記第二位置情報取得部によって取得された前記固定物体の第二の相対位置情報と、前記第一位置情報取得部によって取得された前記固定物体の第一の相対位置情報との差分値を算出して第一の位置情報の差分値として出力する第一差分算出部、
前記第一差分算出部によって出力された前記第一の位置情報の差分値と、前回更新された位置情報の補正値との差分値を算出して第二の位置情報の差分値として出力する第二差分算出部、
前記第二差分算出部によって出力された前記第二の位置情報の差分値に基づいて前記位置情報の補正値を更新する補正値更新部、および、
前記補正値更新部によって更新された前記位置情報の補正値に基づいて前記第一の相対位置情報を補正して前記固定物体の相対位置情報を算出する物体位置算出部、を備えた物体位置算出装置。
続きを表示(約 1,200 文字)
【請求項2】
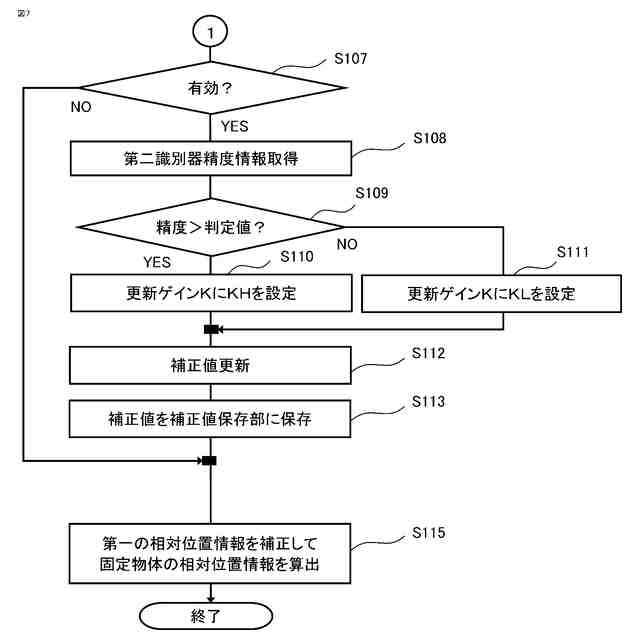
道路区間ごとに規定された前記第二識別器の識別精度情報を取得する第二識別器精度情報取得部を備え、
前記補正値更新部は、前記第二識別器精度情報取得部によって取得された識別精度情報の精度が予め定められた精度判定値よりも高い場合は前記位置情報の補正値の更新量を増大させ、前記第二識別器精度情報取得部によって取得された識別精度情報の精度が前記精度判定値以下の場合は前記補正値の更新量を減少させる請求項1に記載の物体位置算出装置。
【請求項3】
前記第二識別器は画像検出器であり、
前記第二識別器の精度情報では、道路区間がトンネルおよびトンネル出口の場合は識別精度が他の道路区間よりも低く設定されている請求項2に記載の物体位置算出装置。
【請求項4】
前記第一識別器は、前記第二識別器よりも長い距離を識別可能な識別器である請求項1に記載の物体位置算出装置。
【請求項5】
前記第一識別器は、電波を用いたレーダ装置であり、
前記第二識別器は、光を用いた識別器である請求項4に記載の物体位置算出装置。
【請求項6】
前記第一識別器は前記固定物体の距離検出精度が前記第二識別器よりも高い識別器であり、
前記第二識別器は前記固定物体の角度検出精度が前記第一識別器よりも高い識別器である請求項1に記載の物体位置算出装置。
【請求項7】
前記第二識別器の識別精度情報を取得する第二識別器精度情報取得部を備え、
前記補正値更新部は、前記第二識別器精度情報取得部によって取得された識別精度情報の精度が予め定められた精度判定値よりも低い場合は、前記補正値の更新を中止する請求項1に記載の物体位置算出装置。
【請求項8】
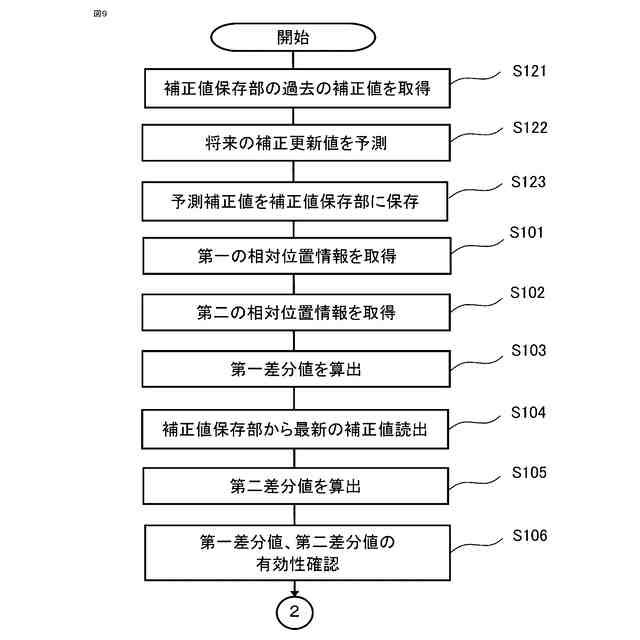
前記補正値更新部によって補正値が更新された履歴に基づいて補正値の将来の更新値を予測する補正予測部を備え、
前記補正値更新部は、予め定められた判定期間を越えて前記補正値の更新が中止されている場合に、前記補正予測部によって予測された前記将来の更新値を用いて前記補正値を更新する請求項1に記載の物体位置算出装置。
【請求項9】
前記第一識別器の識別精度情報を取得する第一識別器精度情報取得部を備え、
補正予測部は、第一識別器精度情報取得部によって取得された前記第一識別器の識別精度情報と前記補正値が更新された履歴に基づいて補正値の将来の更新値を予測する請求項8に記載の物体位置算出装置。
【請求項10】
前記第一位置情報取得部は、前記移動体の現在位置と、地図データによって規定された前記固定物体の位置情報に基づいて前記固定物体の第一の相対位置情報を取得する請求項1に記載の物体位置算出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、物体位置算出装置に関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来から、移動体に搭載された物体位置算出装置の情報を用いて、移動体の位置を推定する技術が知られている。移動体は、自動車、ロボット等の制御機能を有する移動可能な物体である。また移動体の備える物体位置算出装置には、物体を識別するために識別器が設けられている。識別器として、可視光カメラ、レーダ等の移動体の外部の物体の情報を計測する装置、加速度、角速度等の移動体の情報を計測する装置、地図等のデータストレージから移動体の外部の情報を取得する装置等が存在する。
【0003】
また移動体の位置は、移動体の絶対的または相対的な位置を表す情報と定義することができる。移動体の位置は必ずしも地球上における移動体の絶対位置を表す情報(緯度、経度など)でなくてもよい。移動体の外部に存在する物標と車両との位置関係を表す情報(例えば、車両と物標との相対距離など)も、移動体の位置を示す情報である。ここで、物標は、位置識別が可能な物体である。
【0004】
移動体の予測した自己位置に対し、移動体の外部の物標までの距離を計測し、計測した距離情報を用いて自己位置を補正する技術が開示されている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0005】
特許第6968877号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されている技術では、移動体の自己位置精度情報を取得してこの自己位置精度情報に基づいて補正値を求めるための利得を決定している。そして、移動体から対象物までの二種類の手法で求めた計測距離の差から自己位置補正のための補正値を求めている。特許文献1に記載された自己位置精度情報は、車両の推定自車位置と地物との位置関係からヤコビ行列を用いて共分散行列をボディ座標系に変換して得られるX方向、Y方向の分散として求められる。このように自己位置を求めた上で複雑な計算を実行するのは物体位置算出装置にとって負担が大きく、演算処理の遅延または処理装置のコストアップの原因にもなる。
【0007】
本開示は、このような課題を解決するものである。複雑な演算を不要とし、自己位置精度情報を求めることなく、複数の識別器によって識別された外部の物体の相対位置情報の差分に基づいて補正値を更新し、適切な補正によって物体の位置情報を算出することのできる物体位置算出装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
本開示に係る物体位置算出装置は、
移動体の外部に存在する固定物体を識別する第一識別器、
第一識別器によって識別された固定物体と移動体との間の第一の相対位置情報を取得する第一位置情報取得部、
固定物体を識別する第二識別器、
第二識別器によって識別された固定物体と移動体との間の第二の相対位置情報を取得する第二位置情報取得部、
第二位置情報取得部によって取得された固定物体の第二の相対位置情報と、第一位置情報取得部によって取得された固定物体の第一の相対位置情報との差分値を算出して第一の位置情報の差分値として出力する第一差分算出部、
第一差分算出部によって出力された第一の位置情報の差分値と、前回更新された位置情報の補正値との差分値を算出して第二の位置情報の差分値として出力する第二差分算出部、
第二差分算出部によって出力された第二の位置情報の差分値に基づいて位置情報の補正値を更新する補正値更新部、および、
補正値更新部によって更新された位置情報の補正値に基づいて第一の相対位置情報を補正して固定物体の相対位置情報を算出する物体位置算出部、を備えたものである。
【発明の効果】
【0009】
本開示に係る物体位置算出装置によれば、複雑な演算を不要とし、自己位置精度情報を求めることなく、複数の識別器によって識別された外部の物体の相対位置情報の差分に基づいて補正値を更新し、適切な補正によって物体の位置情報を算出することのできる物体位置算出装置を得ることができる。これによって、演算処理の遅延、処理装置のコストアップを抑制しつつ適切に補正を行い精度の高い物体の位置の算出が可能となる。
【図面の簡単な説明】
【0010】
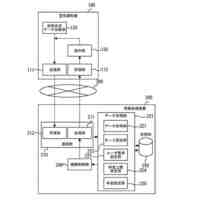
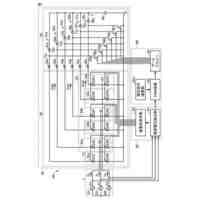
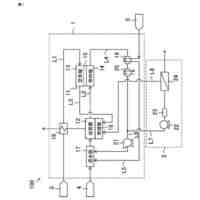
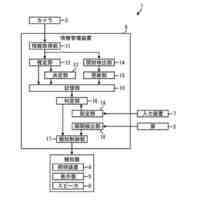
実施の形態1に係る物体位置算出装置の構成図である。
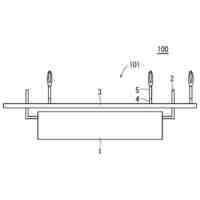
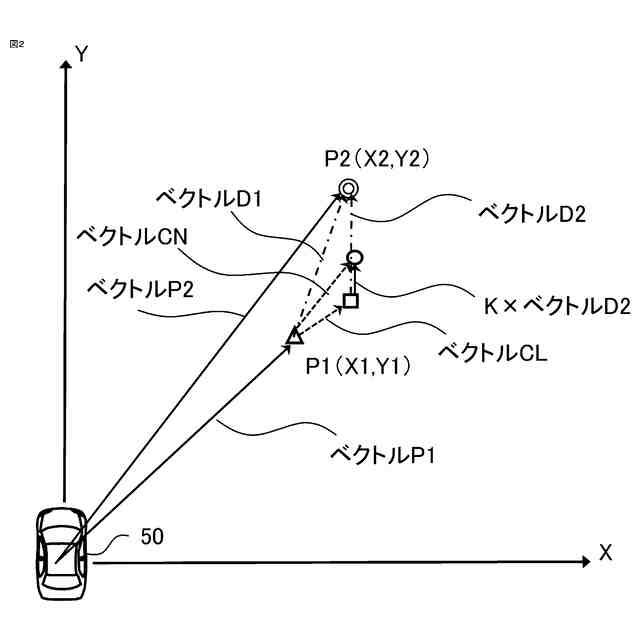
実施の形態1に係る移動体と物体の相対位置の例を示す図である。
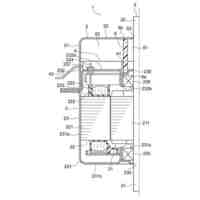
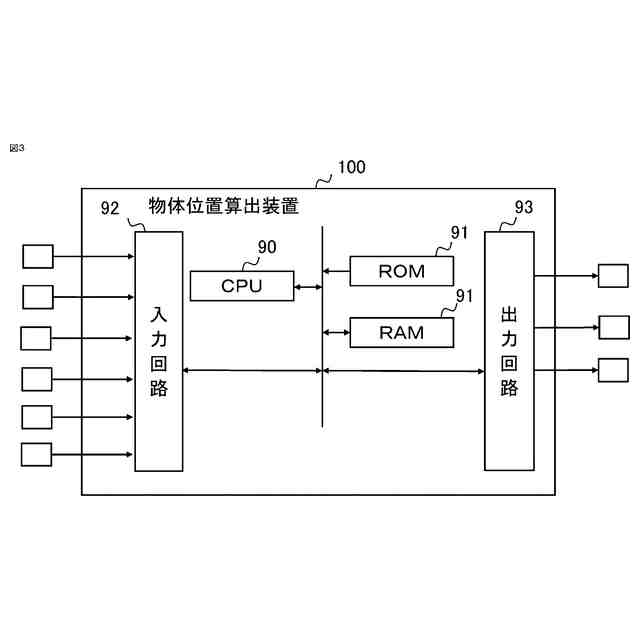
実施の形態1に係る物体位置算出装置のハードウェア構成図を示す図である。
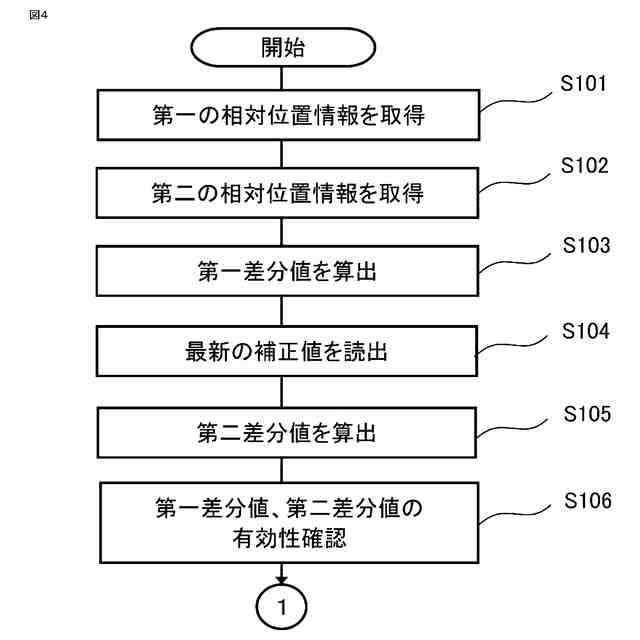
実施の形態1に係る物体位置算出装置の処理を示す第一のフローチャートである。
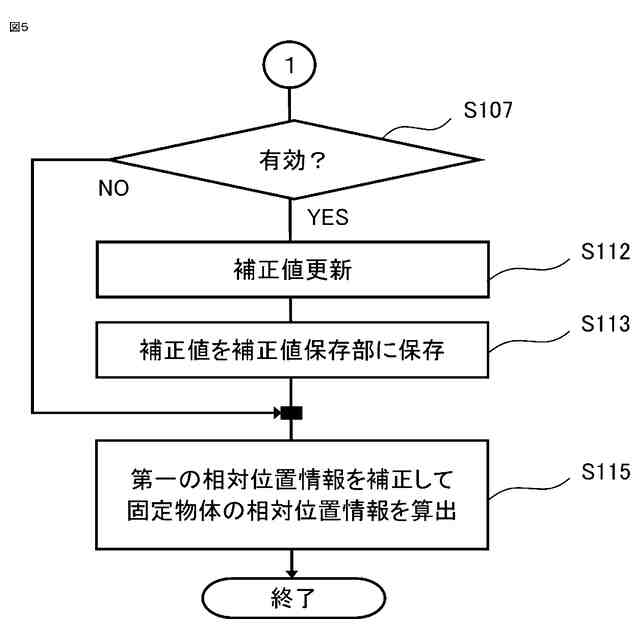
実施の形態1に係る物体位置算出装置の処理を示す第二のフローチャートである。
実施の形態2に係る物体位置算出装置の構成図である。
実施の形態2に係る物体位置算出装置の処理を示す第二のフローチャートである。
実施の形態3に係る物体位置算出装置の構成図である。
実施の形態3に係る物体位置算出装置の処理を示す第一のフローチャートである。
実施の形態3に係る物体位置算出装置の処理を示す第二のフローチャートである。
実施の形態4に係る物体位置算出装置の構成図である。
実施の形態4に係る物体位置算出装置の処理を示す第一のフローチャートである。
実施の形態5に係る物体位置算出装置の構成図である。
実施の形態6に係る物体位置算出装置の構成図である。
実施の形態6に係る移動体と物体の相対位置の例を示す図である。
実施の形態6に係る物体位置算出装置の処理を示す第一のフローチャートである。
実施の形態6に係る物体位置算出装置の処理を示す第二のフローチャートである。
実施の形態7に係る物体位置算出装置の構成図である。
実施の形態7に係る物体位置算出装置の処理を示す第一のフローチャートである。
実施の形態7に係る物体位置算出装置の処理を示す第二のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
12日前
三菱電機株式会社
ミラー
12日前
三菱電機株式会社
照明装置
23日前
三菱電機株式会社
照明器具
26日前
三菱電機株式会社
束線器具
26日前
三菱電機株式会社
照明装置
24日前
三菱電機株式会社
照明装置
24日前
三菱電機株式会社
電源回路
10日前
三菱電機株式会社
半導体装置
17日前
三菱電機株式会社
電気接続部
9日前
三菱電機株式会社
電気掃除機
16日前
三菱電機株式会社
浴室乾燥機
18日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
加熱調理器
3日前
三菱電機株式会社
空調システム
19日前
三菱電機株式会社
電力変換装置
12日前
三菱電機株式会社
制御システム
11日前
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
電力変換装置
26日前
三菱電機株式会社
照明システム
3日前
三菱電機株式会社
半導体製造装置
9日前
三菱電機株式会社
ドハティ増幅器
10日前
三菱電機株式会社
部分放電センサ
10日前
三菱電機株式会社
燃料電池システム
25日前
三菱電機株式会社
半導体モジュール
16日前
三菱電機株式会社
回転子および電動機
16日前
三菱電機株式会社
検査装置および検査方法
9日前
三菱電機株式会社
スイッチング素子制御装置
19日前
三菱電機株式会社
冷蔵庫及び冷蔵庫システム
11日前
三菱電機株式会社
照明制御システム及びセンサ
16日前
三菱電機株式会社
機器制御システムおよび中継装置
9日前
三菱電機株式会社
回路の複雑度の評価装置及び評価方法
17日前
三菱電機株式会社
電動機、換気扇、送風機、及び扇風機
18日前
三菱電機株式会社
磁性部品及びそれを用いた電力変換器
19日前
三菱電機株式会社
半導体装置の製造方法及び半導体装置
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ