TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091067
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206047
出願日
2023-12-06
発明の名称
電動車両の制御方法、及び、電動車両の制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60L
15/20 20060101AFI20250611BHJP(車両一般)
要約
【課題】トルク指令値がごく小さいときにもトルク伝達系の振動を抑制できる電動車両の制御方法及び制御装置を提供する。
【解決手段】回転電機10の回転状態(N
m
)に基づいてフィードバックトルクT
FB
を演算し、フィードバックトルクT
FB
に基づいてトルク指令値(T
m1
*
)を補正し、補正後のトルク指令値(T
m2
*
)にしたがって回転電機10を制御する。フィードバックトルクT
FB
の絶対値|T
FB
|に対して制限値T
lmt
を設定し、かつ、制限値T
lmt
を、補正前のトルク指令値である基本トルク指令値T
m1
*
の絶対値|T
m1
*
|に応じて変化させる。そして、少なくとも基本トルク指令値T
m1
*
の絶対値|T
m1
*
|がゼロとみなせる場合には、基本トルク指令値T
m1
*
の絶対値|T
m1
*
|がゼロとみなせない場合と比較して、基本トルク指令値T
m1
*
の絶対値|T
m1
*
|に応じた制限値T
lmt
の変化を緩慢にする。
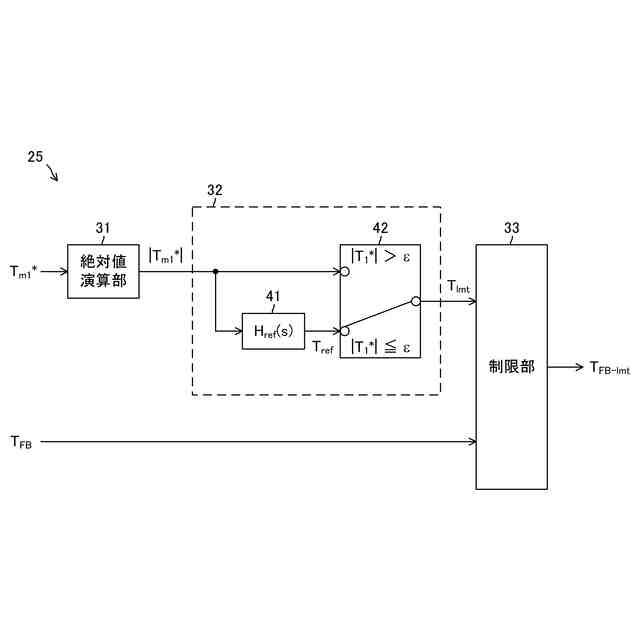
【選択図】図5
特許請求の範囲
【請求項1】
回転電機の回転状態に基づいてフィードバックトルクを演算し、前記フィードバックトルクに基づいてトルク指令値を補正し、補正後の前記トルク指令値にしたがって前記回転電機を制御する、電動車両の制御方法であって、
前記フィードバックトルクの絶対値に対して制限値を設定し、
前記制限値を、前記フィードバックトルクによる補正前の前記トルク指令値である基本トルク指令値の絶対値に応じて変化させ、
少なくとも前記基本トルク指令値の絶対値がゼロとみなせる場合には、前記基本トルク指令値の絶対値がゼロとみなせない場合と比較して、前記基本トルク指令値の絶対値に応じた前記制限値の変化を緩慢にする、
電動車両の制御方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の電動車両の制御方法であって、
前記基本トルク指令値の絶対値と、外乱トルクから前記フィードバックトルクまでの応答を模擬した伝達特性と、用いて、リファレンストルクを演算し、
前記基本トルク指令値の絶対値がゼロとみなせない場合には、前記制限値を、前記基本トルク指令値の絶対値に設定し、
前記基本トルク指令値の絶対値がゼロとみなせる場合には、前記制限値を、前記リファレンストルクに設定する、
電動車両の制御方法。
【請求項3】
請求項1に記載の電動車両の制御方法であって、
前記基本トルク指令値の絶対値がゼロとみなせる場合において、前記基本トルク指令値の絶対値が増加するときの前記制限値の変化が、前記基本トルク指令値の絶対値が減少するときの前記制限値の変化と比較して、大きい、
電動車両の制御方法。
【請求項4】
請求項3に記載の電動車両の制御方法であって、
前記基本トルク指令値の絶対値と、外乱トルクから前記フィードバックトルクまでの応答を模擬した伝達特性と、を用いて、リファレンストルクを演算し、
前記基本トルク指令値の絶対値と前記リファレンストルクを比較することにより、前記基本トルク指令値の絶対値が増加するか否かを判定し、
前記基本トルク指令値の絶対値がゼロとみなすことができ、かつ、前記基本トルク指令値の絶対値が減少するときには、前記制限値を、前記リファレンストルクに設定し、
前記基本トルク指令値の絶対値がゼロとみなすことができる場合であっても、前記基本トルク指令値の絶対値が増加するときには、前記制限値を、前記基本トルク指令値の絶対値に設定する、
電動車両の制御方法。
【請求項5】
請求項1~4のいずれか1項に記載の電動車両の制御方法であって、
前記基本トルク指令値の絶対値を予め定める閾値と比較し、
前記基本トルク指令値の絶対値が前記閾値以下であるときに、前記基本トルク指令値の絶対値がゼロとみなせると判定し、
前記基本トルク指令値の絶対値が前記閾値よりも大きいときに、前記基本トルク指令値の絶対値がゼロとみなせないと判定する、
電動車両の制御方法。
【請求項6】
回転電機の回転状態に基づいてフィードバックトルクを演算し、前記フィードバックトルクに基づいてトルク指令値を補正し、補正後の前記トルク指令値にしたがって前記回転電機を制御する、電動車両の制御装置であって、
前記フィードバックトルクの絶対値に対して制限値を設定し、
前記制限値を、前記フィードバックトルクによる補正前の前記トルク指令値である基本トルク指令値の絶対値に応じて変化させ、
少なくとも前記基本トルク指令値の絶対値がゼロとみなせる場合には、前記基本トルク指令値の絶対値がゼロとみなせない場合と比較して、前記基本トルク指令値の絶対値に応じた前記制限値の変化を緩慢にする、
フィードバックトルク制限部を備える、電動車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両の制御方法及び制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、車両情報に基づく第1トルク目標値と、回転数に基づく第2トルク目標値と、を加算して、モータを制御するためのトルク指令値を演算するときに、第1トルク目標値の符号とトルク指令値の符号を同符号にして、第1トルク目標値に応じてトルク指令値に制限をかける、モータ制御装置を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2012-75257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転電機が生じさせるトルクを伝達するトルク伝達系(ドライブシャフト等)の振動を抑制するために、回転電機の回転状態に基づいてフィードバックトルクを演算し、このフィードバックトルクに基づいてトルク指令値を補正する電動車両が知られている。また、トルク伝達系はギヤを含むので、トルク指令値に正負が逆転すると、ギヤのバックラッシュによる騒音(いわゆるガタ打ち音)が生じることがある。したがって、制振のためにトルク指令値を補正するときには、フィードバックトルクに基づく補正によってトルク指令値の正負が逆転してしまわないように、トルク指令値の大きさに応じて、フィードバックトルクを制限する場合がある。
【0005】
一方、このようにトルク指令値の大きさに応じてフィードバックトルクを制限すると、トルク指令値が小さいときには、フィードバックトルクも小さい値に制限されるので、制振効果が得られ難くなる。具体的には、トルク指令値の大きさが実質的にゼロとなるシーンでは、フィードバックトルクの大きさも実質的にゼロに制限されるので、フィードバックトルクによる補正(制振)は実質的に効かない。このため、トルク指令値の大きさが実質的にゼロとなった場合に、トルク伝達系に振動が発生または残留しているときには、その振動がその後も継続されてしまう。
【0006】
例えば、アクセルを踏み戻したときやシフトポジションをD(ドライブ)レンジからN(ニュートラル)レンジに切り替えたときには、トルク指令値は、ほぼ瞬間的にゼロとなる。一方、回転電機(電動機)の回転は残っているので、トルク伝達系には、回転電機からのトルク入力によって振動が発生する場合がある。このとき、トルク指令値がゼロになったことに応じて、制振のためのフィードバックトルクもゼロに制限されると、トルク伝達系の振動が低減されず、その後も継続してしまう。
【0007】
本発明は、トルク指令値がごく小さいときにもトルク伝達系の振動を抑制できる電動車両の制御方法及び制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のある態様は、回転電機の回転状態に基づいてフィードバックトルクを演算し、フィードバックトルクに基づいてトルク指令値を補正し、補正後のトルク指令値にしたがって回転電機を制御する、電動車両の制御方法である。この電動車両の制御方法では、フィードバックトルクの絶対値に対して制限値を設定し、かつ、制限値を、フィードバックトルクによる補正前のトルク指令値である基本トルク指令値の絶対値に応じて変化させる。そして、少なくとも基本トルク指令値の絶対値がゼロとみなせる場合には、基本トルク指令値の絶対値がゼロとみなせない場合と比較して、基本トルク指令値の絶対値に応じた制限値の変化を緩慢にする。
【発明の効果】
【0009】
本発明によれば、トルク指令値がごく小さいときにもトルク伝達系の振動を抑制できる電動車両の制御方法及び制御装置を提供することができる。
【図面の簡単な説明】
【0010】
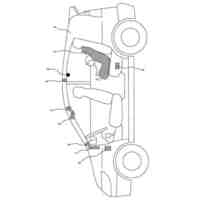
図1は、電動車両の概略構成を示す説明図である。
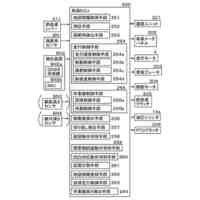
図2は、制振制御部の構成を示すブロック図である。
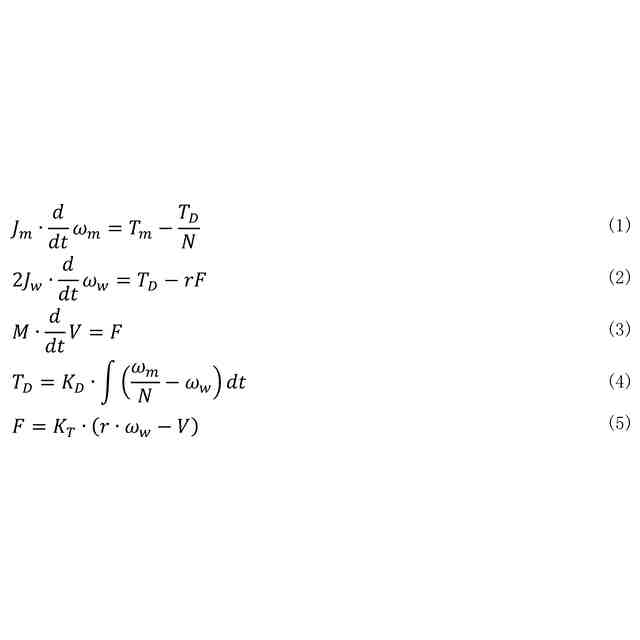
図3は、電動車両の力学的構成を示す説明図である。
図4は、バンドパスフィルタH(s)の特性を示すグラフである。
図5は、フィードバックトルク制限部の構成を示すブロック図である。
図6は、フィードバックトルクに対する制限値の切り替えに係るフローチャートである。
図7は、基本トルク指令値、フィードバックトルク、及び、制限フィードバックトルク等の推移を示すグラフである。
図8は、第2実施形態に係るフィードバックトルク制限部の構成を示すブロック図である。
図9は、第2実施形態における制限値の切り替えに係るフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
19日前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
23日前
日本精機株式会社
ケース
2か月前
井関農機株式会社
作業車両
11日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
13日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
照明装置
3か月前
個人
キャンピングトライク
6日前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
ブレーキシステム
2か月前
株式会社松華
懸架装置
3か月前
個人
ワイパーゴム性能保持具
1か月前
個人
キャンピングトレーラー
6日前
個人
ステージカー
3か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
株式会社クラベ
ヒータユニット
1か月前
横浜ゴム株式会社
タイヤ
2か月前
個人
自走式立体型洗車場
3か月前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
10日前
井関農機株式会社
作業車両
3日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用投影装置
13日前
日本精機株式会社
車両用投影装置
13日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ