TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088181
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202715
出願日
2023-11-30
発明の名称
走路認識装置、走路認識方法およびコンピュータプログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/10 20060101AFI20250604BHJP(車両一般)
要約
【課題】旋回動作の開始当初からセンサの検知結果を利用して道路を認識する。
【解決手段】走路認識装置100、100aは、車両V1が旋回動作を行っているか否かを特定する旋回特定部11と、センサ200の検知結果を取得する検知結果取得部12と、検知結果を利用して、走行予定走路C1の左右の境界線BLL、BLRを特定する境界線特定部13とを備える。境界線特定部は、車両が旋回動作を行っていると特定された場合に、(i)旋回方向外側の境界線である外側境界線BLLを、検知結果に含まれる外側境界線の少なくとも一部である外側検知部分OP1、OP1aを利用して特定し、(ii)旋回方向内側の境界線である内側境界線BLRを、外側検知部分を利用して検知結果に含まれる内側境界線の一部IP1、IP1aを延伸推定することにより特定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の走行予定走路を認識する走路認識装置であって、
前記車両(V1)が旋回動作を行っているか否かを特定する旋回特定部(11)と、
前記車両に搭載されて前記車両の周囲の環境を検知するセンサ(200)の検知結果を取得する検知結果取得部(12)と、
前記検知結果を利用して、前記走行予定走路(C1)の左右の境界線(BLL、BLR)を特定する境界線特定部(13)と、
を備え、
前記境界線特定部は、前記車両が旋回動作を行っていると特定された場合に、
(i)前記左右の境界線のうち、旋回方向外側の境界線である外側境界線(BLL)を、前記検知結果に含まれる前記外側境界線の少なくとも一部である外側検知部分(OP1、OP1a)を利用して特定し、
(ii)前記左右の境界線のうち、旋回方向内側の境界線である内側境界線(BLR)を、前記外側検知部分を利用して前記検知結果に含まれる前記内側境界線の一部(IP1、IP1a)を延伸推定することにより特定する、
走路認識装置。
続きを表示(約 2,900 文字)
【請求項2】
請求項1に記載の走路認識装置において、
前記センサは、前方センサ(210)および周辺センサ(220)であって、前記車両の少なくとも前方の環境を検知し、前記周辺センサに比べて遠方の障害物を高精度に検知可能な前記前方センサと、前記車両の少なくとも側方または後方の環境を検知し、前記前方センサに比べて広角範囲で障害物を検知可能な前記周辺センサと、を含み、
前記境界線特定部は、前記車両が旋回動作を行っていると特定された場合に、
(i)前記前方センサの前記検知結果に含まれる前記外側検知部分を利用して前記外側境界線を特定し、
(ii)前記周辺センサの前記検知結果に含まれる前記内側境界線の一部を、前記前方センサの前記検知結果に含まれる前記外側検知部分を利用して延伸推定することにより、前記内側境界線を特定する、走路認識装置。
【請求項3】
請求項2に記載の走路認識装置において、
前記境界線特定部は、前記内側境界線の一部を前記外側検知部分と平行となるように延伸推定することにより、前記内側境界線を特定する、走路認識装置。
【請求項4】
請求項3に記載の走路認識装置において、
前記周辺センサの前記検知結果に含まれる前記内側境界線の一部と、前記前方センサの前記検知結果に含まれる前記外側検知部分と、が同一走路の左右の境界線として互いに相関するか否かを判定する相関判定部(15)を、さらに備え、
前記境界線特定部は、前記相関判定部により互いに相関すると判定された場合に、前記内側境界線の一部を前記外側検知部分と平行となるように延伸推定することにより、前記内側境界線を特定する、走路認識装置。
【請求項5】
請求項1から請求項4までのいずれか一項に記載の走路認識装置において、
前記センサは、前方センサ(210)および周辺センサ(220)であって、前記車両の少なくとも前方の環境を検知し、前記周辺センサに比べて遠方の障害物を高精度に検知可能な前記前方センサと、前記車両の少なくとも側方または後方の環境を検知し、前記前方センサに比べて広角範囲で障害物を検知可能な前記周辺センサと、を含み、
前記境界線特定部は、前記車両が旋回動作を行っていると特定された場合であって、前記周辺センサの前記検知結果に前記内側境界線の一部である第1内側検知部分(IIP1a)が含まれ、且つ、前記前方センサの前記検知結果に前記外側検知部分(OP1a)と前記内側境界線の一部である第2内側検知部分(IP1b)とがいずれも含まれる場合に、
(iii)前記第1内側検知部分を、前記外側検知部分と平行となるように延伸推定することにより、前記内側境界線の候補である第1候補境界線(CL1)を特定し、
(iv)前記第2内側検知部分を、前記外側検知部分と平行となるように延伸推定することにより、前記内側境界線の候補である第2候補境界線(CL2)を特定し、
(v)前記第1候補境界線と前記第2候補境界線とのうち、前記走行予定走路の幅方向の中央(CR)により近い境界線を、前記内側境界線として特定する、走路認識装置。
【請求項6】
請求項1から請求項4までのいずれか一項に記載の走路認識装置において、
前記センサは、前方センサ(210)および周辺センサ(220)であって、前記車両の少なくとも前方の環境を検知し、前記周辺センサに比べて遠方の障害物を高精度に検知可能な前記前方センサと、前記車両の少なくとも側方または後方の環境を検知し、前記前方センサに比べて広角範囲で障害物を検知可能な前記周辺センサと、を含み、
前記境界線特定部は、前記車両が旋回動作を行っていると特定された場合であって、前記周辺センサの前記検知結果に前記内側境界線の一部である第1内側検知部分(IP1a)が含まれ、且つ、前記前方センサの前記検知結果に前記外側検知部分(OP1a)と前記内側境界線の一部である第2内側検知部分(IP1b)とがいずれも含まれる場合に、
(vi)前記第2内側検知部分を、前記外側検知部分と平行となるように延伸推定することにより、前記内側境界線の候補である候補境界線(CL2)を特定し、
(vii)前記候補境界線のうちの前記第1内側検知部分に対して前記走行予定走路の幅方向に見て重複する部分(OVP)を除く他の部分(CL3)と、前記第1内側検知部分との集合を、前記内側境界線(BLR)として特定する、走路認識装置。
【請求項7】
車両の走行予定走路を認識する走路認識方法であって、
走路認識装置(100、100a)により、前記車両(V1)が旋回動作を行っているか否かを特定する工程と、
前記走路認識装置により、前記車両に搭載されて前記車両の周囲の環境を検知するセンサ(200)の検知結果を取得する工程と、
前記走路認識装置により、前記検知結果を利用して、前記走行予定走路の左右の境界線(BLL、BLR)を特定する工程と、
を備え、
前記左右の境界線を特定する工程は、前記車両が旋回動作を行っていると特定された場合に、
(i)前記左右の境界線のうち、旋回方向外側の境界線である外側境界線(BLL)を、前記検知結果に含まれる前記外側境界線の少なくとも一部である外側検知部分(OP1、OP1a)を利用して特定する工程と、
(ii)前記左右の境界線のうち、旋回方向内側の境界線である内側境界線(BLR)を、前記外側検知部分を利用して前記検知結果に含まれる前記内側境界線の一部(IP1、IP1a)を延伸推定することにより特定する工程と、
を含む、走路認識方法。
【請求項8】
車両の走行予定走路を認識するためのコンピュータプログラムであって、
前記車両(200)が旋回動作を行っているか否かを特定する機能と、
前記車両に搭載されて前記車両の周囲の環境を検知するセンサ(200)の検知結果を取得する機能と、
前記走行予定走路の左右の境界線(BLL、BLR)を特定する機能と、
をコンピュータに実現させ、
前記左右の境界線を特定する機能は、前記車両が旋回動作を行っていると特定された場合に、
(i)前記左右の境界線のうち、旋回方向外側の境界線である外側境界線(BLL)を、前記検知結果に含まれる前記外側境界線の少なくとも一部である外側検知部分(OP1、OP1a)を利用して特定する機能と、
(ii)前記左右の境界線のうち、旋回方向内側の境界線である内側境界線(BLR)を、前記外側検知部分を利用して前記検知結果に含まれる前記内側境界線の一部(IP1、IP1a)を延伸推定することにより特定する機能と、
を含む、コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走路認識装置、走路認識方法およびコンピュータプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来から、ステレオカメラやミリ波レーダ等のセンサによって車両前方の環境を検知し、その検知結果を利用して車両の走行予定走路を認識する走路認識装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-070895号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
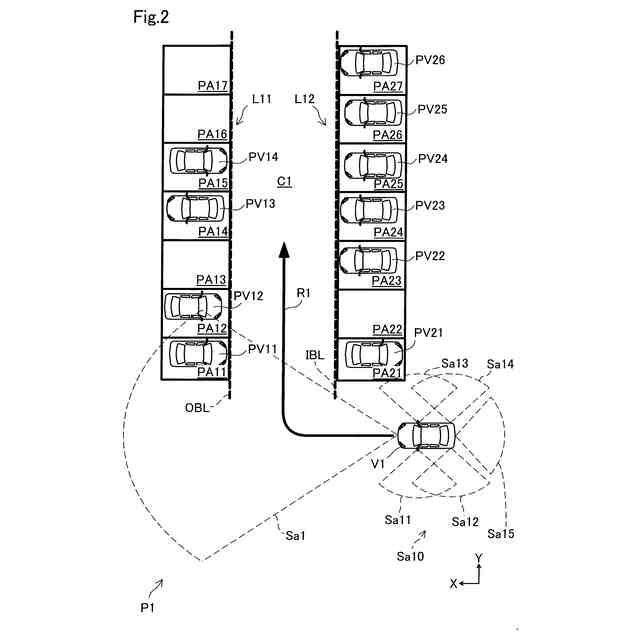
従来の走路認識装置では、センサの検知範囲は車両の前方であるため、右折や左折などの旋回動作を行う際には、旋回方向外側の環境はセンサにより検知できる一方、旋回方向内側の環境は、旋回動作の開始当初には検知できない。例えば、右折する際には、旋回方向外側に相当する車両の左側の環境はセンサにより検知できる一方、旋回方向内側に相当する車両の右側の環境は、旋回動作の開始当初にはセンサにより検知できない。このため、旋回動作の当初には、道路の左右の境界線を特定できず、走路を認識できないという問題があった。そこで、旋回動作の開始当初からセンサの検知結果を利用して道路を認識可能な技術が望まれる。
【課題を解決するための手段】
【0005】
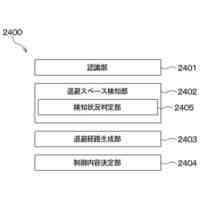
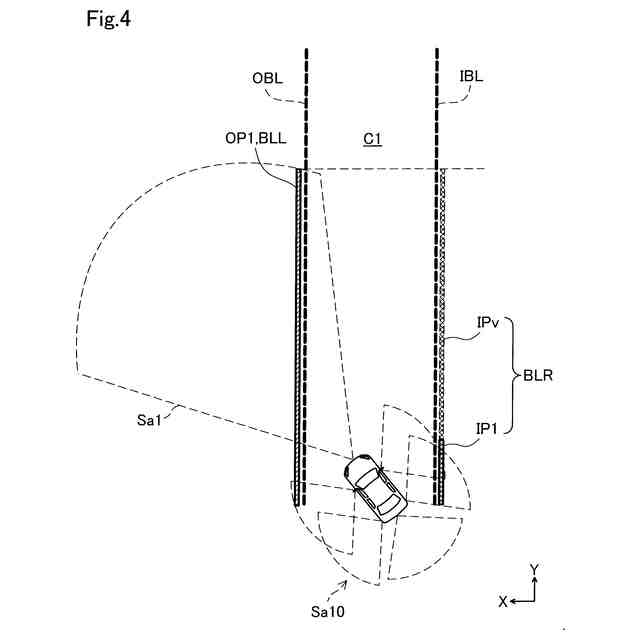
本開示の一形態として、車両の走行予定走路を認識する走路認識装置が提供される。この走路認識装置(100、100a)は、前記車両(V1)が旋回動作を行っているか否かを特定する旋回特定部(11)と、前記車両に搭載されて前記車両の周囲の環境を検知するセンサ(200)の検知結果を取得する検知結果取得部(12)と、前記検知結果を利用して、前記走行予定走路(C1)の左右の境界線(BLL、BLR)を特定する境界線特定部(13)と、を備える。前記境界線特定部は、前記車両が旋回動作を行っていると特定された場合に、(i)前記左右の境界線のうち、旋回方向外側の境界線である外側境界線(BLL)を、前記検知結果に含まれる前記外側境界線の少なくとも一部である外側検知部分(OP1、OP1a)を利用して特定し、(ii)前記左右の境界線のうち、旋回方向内側の境界線である内側境界線(BLR)を、前記外側検知部分を利用して前記検知結果に含まれる前記内側境界線の一部(IP1、IP1a)を延伸推定することにより特定する。
【0006】
上記形態の走路認識装置によれば、走行予定走路の左右の境界線のうち、旋回方向内側の境界線である内側境界線を、外側検知部分を利用して検知結果に含まれる内側境界線の一部を延伸推定することにより特定するので、旋回動作の開始当初から内側境界線を精度良く特定でき、走行予定走路を認識することができる。
【0007】
本開示は、種々の形態で実現することも可能である。例えば、走路認識方法、走路認識装置や走路認識方法を実現するためのコンピュータプログラム、かかるコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0008】
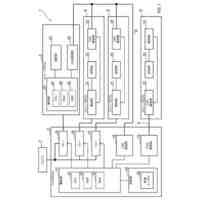
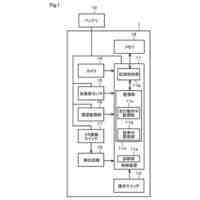
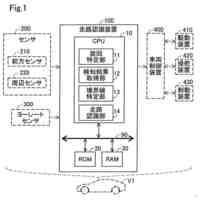
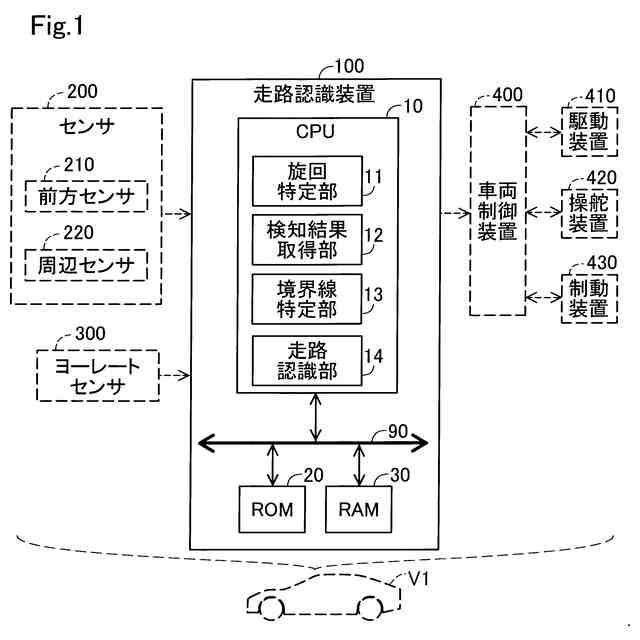
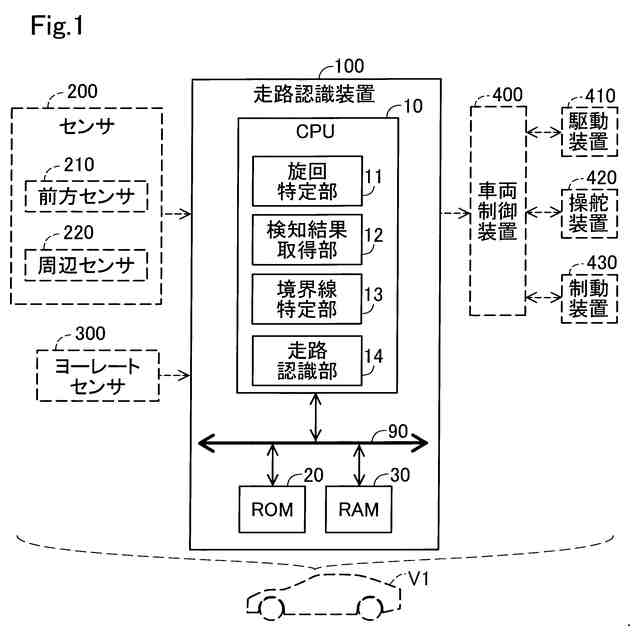
本開示の一実施形態としての走路認識装置の構成を示すブロック図である。
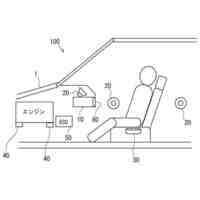
駐車場内を右折する直前の前方センサおよび周辺センサの検知範囲を示す説明図である。
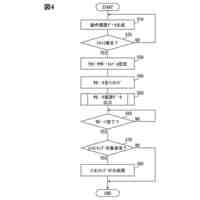
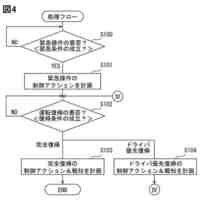
第1実施形態の走路認識処理の手順を示すフローチャートである。
旋回動作中の前方センサおよび周辺センサの検知範囲の一例を示す説明図である。
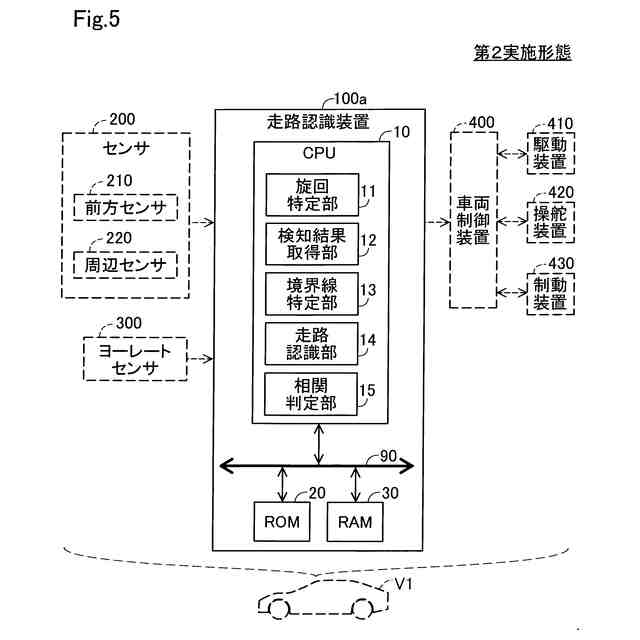
第2実施形態における走路認識装置の構成を示すブロック図である。
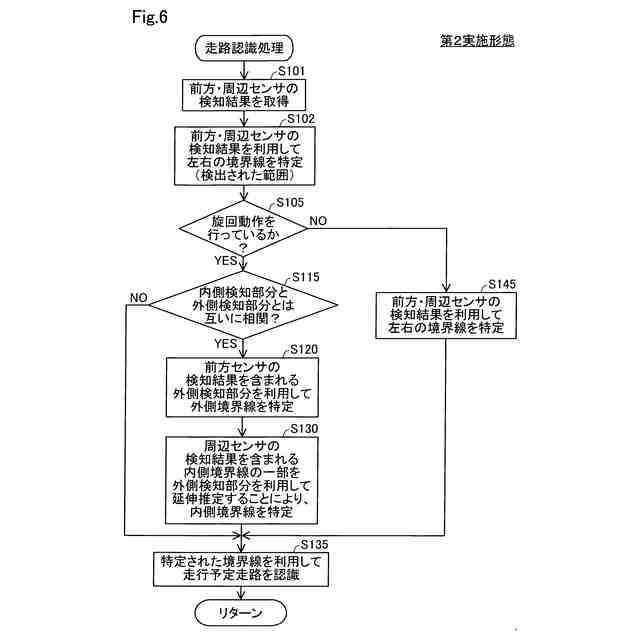
第2実施形態の走路認識処理の手順を示すフローチャートである。
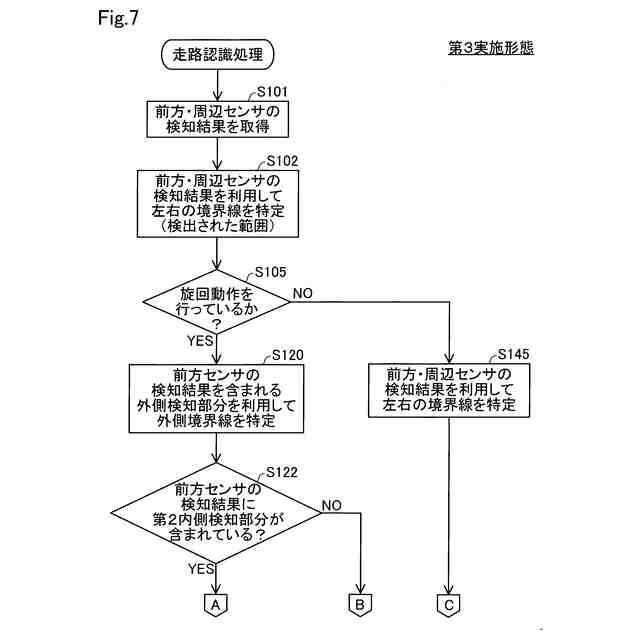
第3実施形態の走路認識処理の手順を示すフローチャートである。
第3実施形態の走路認識処理の手順を示すフローチャートである。
第3実施形態における旋回動作中の前方センサおよび周辺センサの検知範囲の一例を示す説明図である。
第3実施形態における第1候補境界線および第2候補境界線の一例を示す説明図である。
第4実施形態の走路認識処理の手順を示すフローチャートである。
第4実施形態における内側境界線を特定する方法を示す説明図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A1.装置構成:
図1に示す第1実施形態の走路認識装置100は、車両V1に搭載され、車両V1の走行予定の走路を認識する。本実施形態において、車両V1は、自動運転が可能な車両として構成されている。後述するように、走路認識装置100により認識された走行予定走路に基づき、車両V1の通過すべき座標(目標座標)を決定し、かかる座標を通過するように自動的に運転が制御される。車両V1は、エンジン車、ハイブリッド車(HEV)、プラグインハイブリッド車(PHEV)、電気車(EV)、燃料電池車両(FCV、FCHV)など、任意の種類の車両として構成してもよい。
【0010】
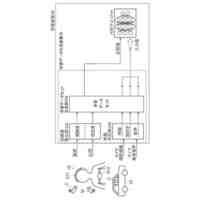
車両V1には、走路認識装置100の他、センサ200、ヨーレートセンサ300、車両制御装置400、駆動装置410、操舵装置420、制動装置430を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
ステータ
8日前
株式会社デンソー
ステータ
3日前
株式会社デンソー
ステータ
3日前
株式会社デンソー
電子装置
4日前
株式会社デンソー
半導体装置
7日前
株式会社デンソーウェーブ
三次元計測装置
7日前
株式会社デンソー
モータの製造方法
4日前
株式会社デンソーウェーブ
情報コード読取システム
3日前
株式会社デンソー
二酸化炭素回収システム
3日前
株式会社デンソー
半導体装置とその製造方法
4日前
株式会社SOKEN
導波管
1日前
株式会社デンソー
電子制御装置および通信システム
3日前
株式会社デンソー
ドライブレコーダ及び駐車監視方法
3日前
株式会社デンソー
巻付搬送装置、および、巻付搬送方法
4日前
株式会社デンソーウェーブ
ロボットシステム、設置構造、設置方法
4日前
株式会社デンソー
支援システム、支援方法、支援プログラム
3日前
株式会社デンソーテン
振動信号生成方法、音響装置、及び音響システム
2日前
株式会社デンソー
動作制御装置、動作制御プログラムおよび電子制御装置
4日前
株式会社デンソー
走路認識装置、走路認識方法およびコンピュータプログラム
2日前
株式会社デンソーテン
通知制御装置、方法及びプログラム、並びに、車載用通知システム
7日前
株式会社SOKEN
制御装置、制御方法、および制御プログラム
7日前
株式会社デンソーテン
学習方法、検出装置、学習データ生成装置、及び学習データ生成プログラム
3日前
トヨタ自動車株式会社
制御装置、運転支援方法、及びコンピュータプログラム
2日前
株式会社デンソー
運転システム、処理方法、処理プログラム
1日前
株式会社デンソー
運転システム、処理方法、処理プログラム
1日前
株式会社デンソーテン
学習データ生成装置、学習装置、感情推定装置、学習データ生成方法および学習データ生成プログラム
7日前
個人
飛行自動車
3か月前
個人
カーテント
10日前
個人
警告装置
1か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
14日前
日本精機株式会社
ケース
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ