TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086595
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200684
出願日
2023-11-28
発明の名称
ロボットシステム、設置構造、設置方法
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/00 20060101AFI20250602BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】協働ロボットの利便性の向上と作業効率の向上とに寄与すること。
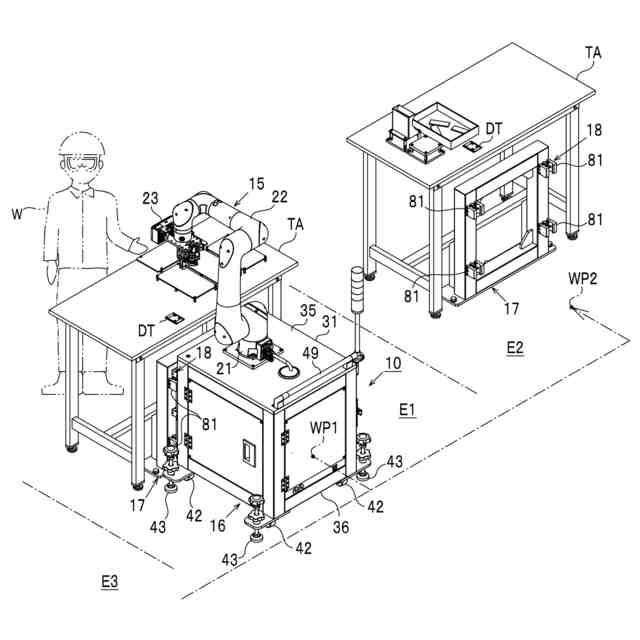
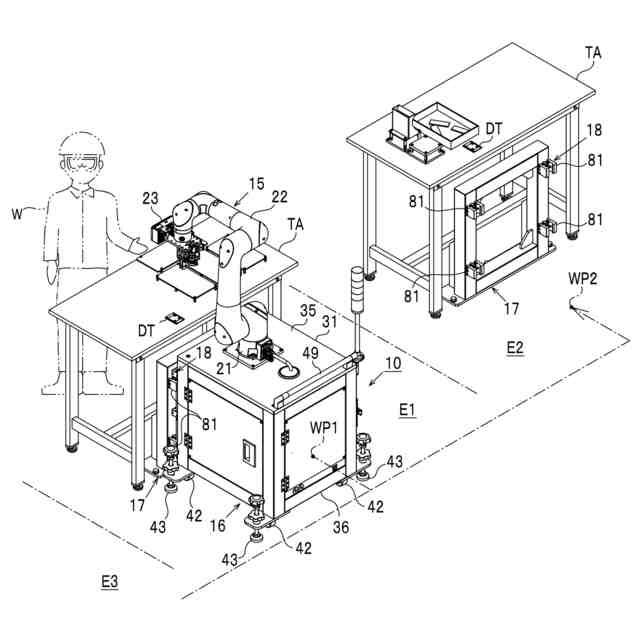
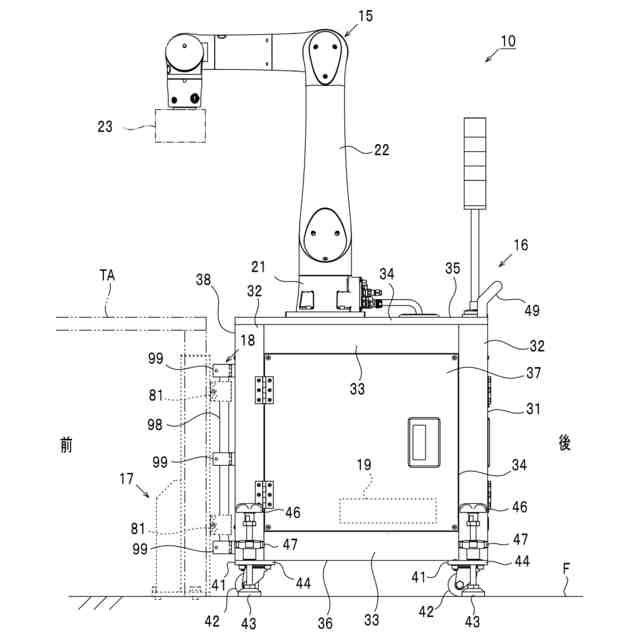
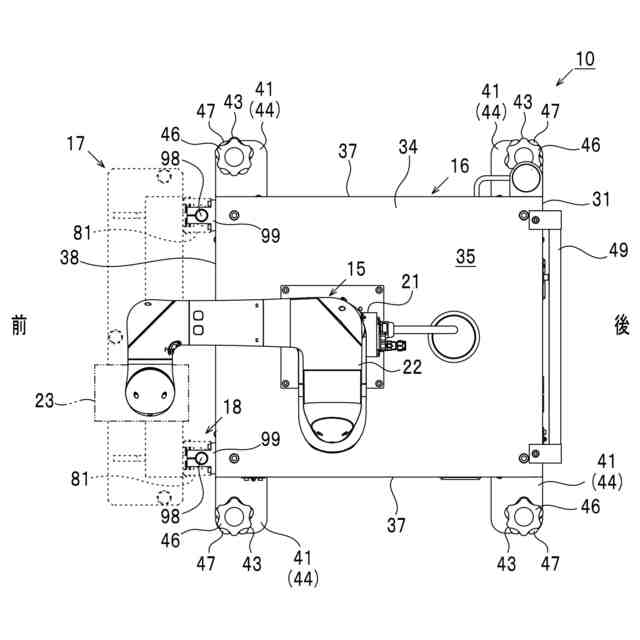
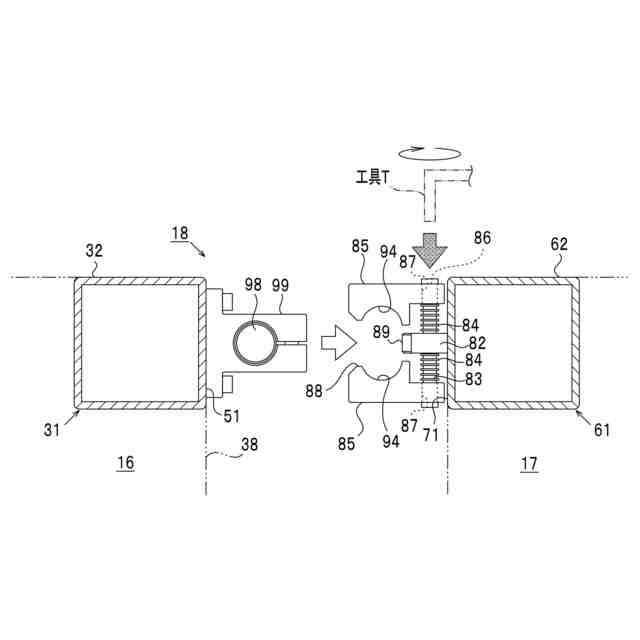
【解決手段】ロボットシステム10は、複数の関節部が形成されたアーム22を有するロボット15と、ロボット15の周辺に人がいる場合にはアーム22の手先の移動速度が所定速度よりも低くなるようにして駆動制御し、周辺に人がいない場合には手先の移動速度が所定速度を超える高速移動を許容するようにして駆動制御するロボットコントローラと、ロボット15が搭載された移動式の架台16と、床面Fに固定されたドッキングベース17と、架台16をドッキングベース17に固定する固定機構18とを備えている。固定機構18は、ドッキングベース17に設けられた連結装置81と、架台16に設けられた棒状部材とを有してなる。連結装置81は、ボルトの締め付け操作により棒状部材を挟み込む一対の可動ブロックを含む。
【選択図】 図1
特許請求の範囲
【請求項1】
複数の関節部を有し手先が高速移動可能となるように構成された協働ロボットと、前記協働ロボットが搭載される移動式の架台とを有するロボットシステムに適用され、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造であって、
床面又は当該床面に設置された設備機器に固定されるドッキングベースと、
前記所定の作業位置に配置された前記架台を前記床面に接地した状態で前記ドッキングベースに固定する固定機構と
を備えている設置構造。
続きを表示(約 2,100 文字)
【請求項2】
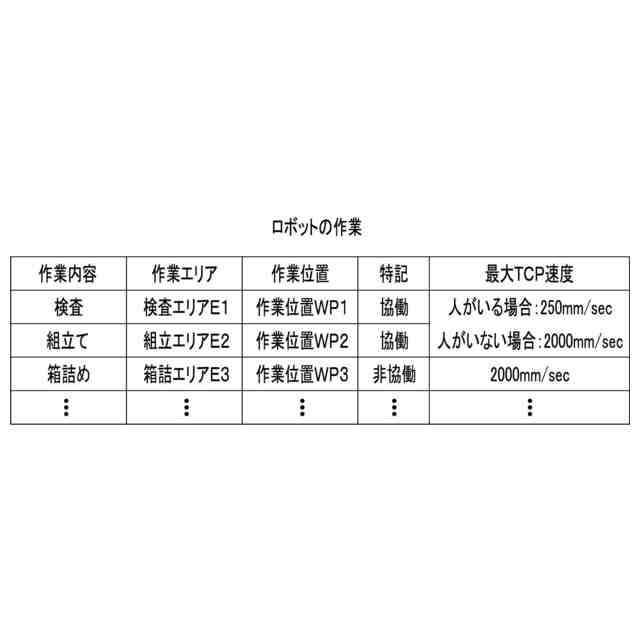
複数の関節部を有する協働ロボットと、前記協働ロボットの周辺に人がいる状況下では手先の移動速度が所定速度よりも低くなるようにして前記協働ロボットを駆動制御し、前記協働ロボットの周辺に人がいない状況下では前記所定速度を超えた高速移動が可能となるようにして前記協働ロボットを駆動制御するロボットコントローラと、前記協働ロボットが搭載される移動式の架台とを有するロボットシステムに適用され、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造であって、
床面又は当該床面に設置された設備機器に固定されるドッキングベースと、
前記所定の作業位置に配置された前記架台を前記床面に接地した状態で前記ドッキングベースに固定する固定機構と
を備えている設置構造。
【請求項3】
前記固定機構は、前記ドッキングベース及び前記架台の一方に設けられた一対の係合部材と、前記ドッキングベース及び前記架台の他方に設けられ、前記一対の係合部材によって挟まれた状態でそれら係合部材に係合する被係合部とを有してなる請求項1又は請求項2に記載の設置構造。
【請求項4】
前記架台の上面部が前記協働ロボットの搭載面となっており、
ユーザの固定操作に基づいて前記一対の係合部材を前記被係合部を挟み込む位置及び挟み込まない位置へ変位させる作用部を備え、
前記作用部は、前記架台と前記ドッキングベースとの境界部分において当該境界部分の外縁寄りとなる位置に配設されており、
前記作用部にて前記固定操作の対象となる部分は、前記境界部分から前記架台の側方へ露出している請求項3に記載の設置構造。
【請求項5】
前記固定機構は、前記架台を着脱可能とする非固定状態と、水平方向及び鉛直方向の各方向への前記架台の変位を規制する固定状態と、前記架台の取り外しを規制する一方、少なくとも前記鉛直方向への前記架台の移動を許容する仮固定状態とに切替可能となっている請求項1又は請求項2に記載の設置構造。
【請求項6】
前記固定機構は、前記架台に設けられた一対の係合部材と、前記ドッキングベースに設けられ、前記一対の係合部材によって挟まれた状態でそれら係合部材に係合する被係合部とを有してなる請求項1又は請求項2に記載の設置構造。
【請求項7】
複数の関節部を有する協働ロボットと、
前記協働ロボットの周辺に人がいる状況下では手先の移動速度が所定速度よりも低くなるようにして前記協働ロボットを駆動制御し、前記協働ロボットの周辺に人がいない状況下では前記所定速度を超えた高速移動が可能となるようにして前記協働ロボットを駆動制御するロボットコントローラと、
前記協働ロボットが搭載される移動式の架台と、
前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造と
を備え、
前記設置構造は、
床面又は当該床面に設置された設備機器に固定されるドッキングベースと、
前記所定の作業位置に配置された前記架台を前記床面に接地した状態で前記ドッキングベースに固定する固定機構と
を備えているロボットシステム。
【請求項8】
複数の関節部を有する協働ロボットと、前記協働ロボットの周辺に人がいる状況下では手先の移動速度が所定速度よりも低くなるようにして前記協働ロボットを駆動制御し、前記協働ロボットの周辺に人がいない状況下では前記所定速度を超えた高速移動が可能となるようにして前記協働ロボットを駆動制御するロボットコントローラと、前記協働ロボットが搭載される移動式の架台と、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造とを備え、前記架台には、床面に接地することにより当該架台の姿勢を安定させるアジャスタが設けられており、前記設置構造は、床面又は当該床面に設置された設備機器に固定されるドッキングベースと、前記所定の作業位置に配置された前記架台を前記ドッキングベースに固定する固定機構とを有してなり、前記固定機構は、前記架台を着脱可能とする非固定状態と、水平方向及び鉛直方向の各方向への前記架台の変位を規制する固定状態と、前記架台の取り外しを規制する一方、少なくとも前記鉛直方向への前記架台の移動を許容する仮固定状態とに切替可能となっているロボットシステムに適用され、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置方法であって、
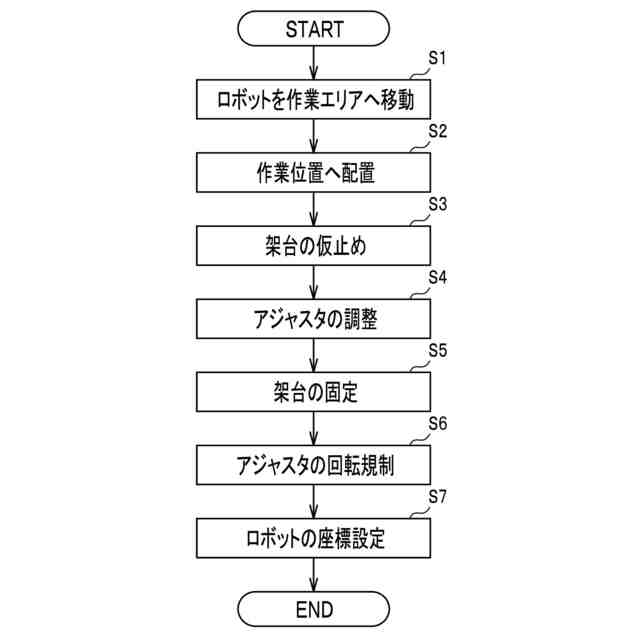
前記協働ロボットが搭載された前記架台を前記所定の作業位置へ配置する配置工程と、
前記架台を前記所定の作業位置へ配置した後に、前記固定機構を前記非固定状態から前記仮固定状態に切り替える第1切替工程と、
前記固定機構を前記仮固定状態に切り替えた後に、前記アジャスタを床面に接地させるアジャスタ調整工程と、
前記アジャスタを床面に接地させた後に、前記固定機構を前記仮固定状態から前記固定状態に切り替える第2切替工程と
を含む設置方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、協働ロボットが搭載される架台の設置構造及び設置方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
産業用ロボット等のロボットには、移動式の架台にロボットを搭載することでロボットの配置変更等に配慮されているものがある(例えば特許文献1参照)。この種のロボットによれば、据え付けタイプのロボットと比較して、ユーザの利便性の向上等が期待できる。
【先行技術文献】
【特許文献】
【0003】
特開2018-176305号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
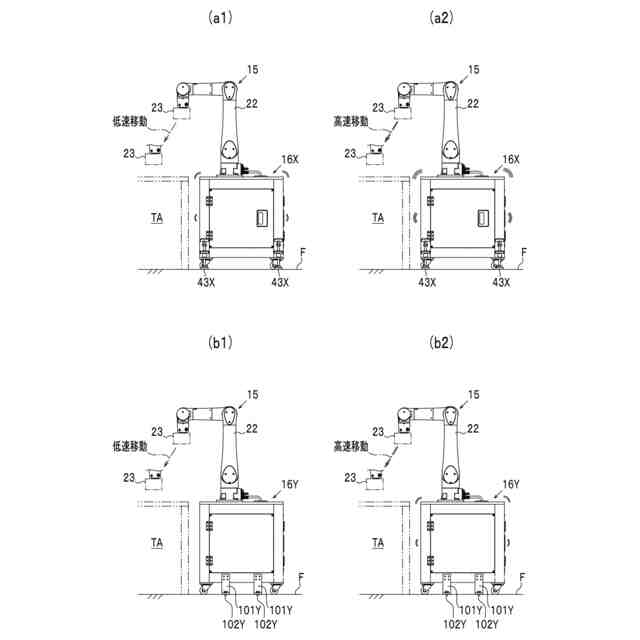
近年ではロボットの小型化や信頼性の向上(安全柵を必須としないロボットの開発)に伴い人とロボットとの協働が実現されつつある。この種の協働ロボットについては、安全性に配慮して手先が低速で移動するように構成される。本件の発明者は、安全性の低下を抑えつつ協働ロボットの作業効率の向上を図るべく、協働ロボットの周辺に人がいない場合等に手先を高速移動させる構成を考案した。ここで、手先を低速移動させる場合には当該移動に伴って発生する慣性力(衝撃)は小さくなるため協働ロボットの動きに支障は生じない。これに対して、手先を高速移動させた場合には、上記慣性力を架台で受けきれず、協働ロボットが大きく揺れる可能性が高くなる。このような揺れは協働ロボットの挙動を乱す要因となり、作業効率を向上させる効果が上手く発揮されなくなると想定される。このように、協働ロボットを移動式の架台に搭載してユーザの利便性の向上を図りつつ協働ロボットの作業効率の向上を図る上では当該協働ロボットの設置に係る構成に未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、協働ロボットの利便性の向上と作業効率の向上とに寄与することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
第1の手段.複数の関節部を有し手先が高速移動可能となるように構成された協働ロボットと、前記協働ロボットが搭載される移動式の架台とを有するロボットシステムに適用され、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造であって、
床面又は当該床面に設置された設備機器に固定されるドッキングベースと、
前記所定の作業位置に配置された前記架台を前記床面に接地した状態で前記ドッキングベースに固定する固定機構と
を備えている。
【0008】
第1の手段に示すように協働ロボットを移動式の架台に搭載して設置位置を簡易に変更可能とすることは、ユーザビリティの向上を図る上で好ましい。ここで、協働ロボット(小型ロボット)については、人との協働を前提としない大型のロボットと比較して動作速度(手先の移動速度)が低い。これは、ロボットシステムの安全性を向上させる上で効果的である。但し、協働を前提とする場合であっても作業の進捗等によってはロボットの周辺に作業者等がいない状況も発生し得る。また、人との協働を前提としない単独作業に協働ロボットを従事させるといった状況も発生し得る。これらの状況では、手先を高速移動させることでロボットの作業効率を向上させたとしても、ロボットシステムの安全性の低下を実質的に回避できる。但し、協働ロボットにおいては、そもそもそのような高速移動が想定されておらず、単にロボットの出力を大きくして架台上で高速移動させる構成とした場合には、ロボットの動作開始時/停止時や手先の移動方向の変化時に大きな慣性力(衝撃)が発生し得る。その慣性力を架台で受けきれない場合にはロボットとともに架台が大きく揺れてロボットの挙動の乱れる可能性がある。このような挙動の乱れによってロボット(例えば手先)がワークや治具等に衝突しやすくなると懸念される。これは、作業効率の向上を図る上で妨げになり得る。つまり、単に動作速度を高くしただけでは作業効率の向上効果は上手く発揮できない。この点、本手段に示す構成では、所定の作業位置に配置された架台は床面に接地した状態でドッキングベースに固定されることとなる。すなわち、架台とドッキングベースとが一体化され、一体化された架台及びドッキングベースがロボットの土台として機能することとなる。上述した揺れは土台が大きくなり且つ床面へ固定されることで軽減され、ロボットの挙動の乱れが抑制されることとなる。つまり、本手段に示す構成によれば、ロボットの高速移動を許容してロボットの作業効率の向上に寄与できる。
【0009】
第2の手段.複数の関節部を有する協働ロボットと、前記協働ロボットの周辺に人がいる状況下では手先の移動速度が所定速度よりも低くなるようにして前記協働ロボットを駆動制御し、前記協働ロボットの周辺に人がいない状況下では前記所定速度を超えた高速移動が可能となるようにして前記協働ロボットを駆動制御するロボットコントローラと、前記協働ロボットが搭載される移動式の架台とを有するロボットシステムに適用され、前記協働ロボットが搭載された前記架台を所定の作業位置に設置するための設置構造であって、
床面又は当該床面に設置された設備機器に固定されるドッキングベースと、
前記所定の作業位置に配置された前記架台を前記床面に接地した状態で前記ドッキングベースに固定する固定機構と
を備えている。
【0010】
第2の手段に示す構成によれば、ロボットの高速移動を許容してロボットの作業効率の向上に寄与できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
10日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
13日前
トヨタ自動車株式会社
関節機構
15日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
24日前
株式会社スター精機
吸着パッド
9日前
工機ホールディングス株式会社
作業機
1日前
学校法人五島育英会
アーム機構
15日前
工機ホールディングス株式会社
作業機
1日前
工機ホールディングス株式会社
作業機
1日前
株式会社スター精機
吸着パッド
9日前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
20日前
庄内機械株式会社
釘打装置
28日前
川崎重工業株式会社
制動システム
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
オークラ輸送機株式会社
ハンド装置
23日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
7日前
トヨタ自動車東日本株式会社
搬送治具
28日前
芝浦機械株式会社
双腕ロボット
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社マキタ
電動作業機
16日前
株式会社リコー
多関節ロボット
14日前
株式会社マキタ
電動作業機
16日前
株式会社ダイヘン
ロボット制御システム
13日前
株式会社ジャノメ
ロボット
3日前
株式会社安川電機
ロボット
7日前
株式会社安川電機
ロボット
7日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
7日前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































