TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086468
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200462
出願日
2023-11-28
発明の名称
情報処理装置、方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06F
16/909 20190101AFI20250602BHJP(計算;計数)
要約
【課題】現実空間の検索を手間なく実施することである。
【解決手段】現実空間を計測した計測情報に基づいて生成した、物体の物体種別及び配置関係を含む物体配置情報を取得する物体配置情報取得手段と、ユーザからの問い合わせ情報を入力する問い合わせ情報入力手段と、前記物体配置情報及び前記問い合わせ情報を入力し、複数の物体の位置関係を表す物体配置特性を保持する物体配置特性データベースを用いて、前記問い合わせ情報に対する回答を予測する予測手段と、を備える。
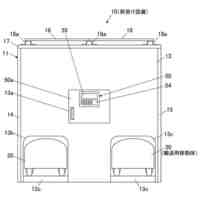
【選択図】図1
特許請求の範囲
【請求項1】
現実空間を計測した計測情報に基づいて生成した、物体の物体種別及び配置関係を含む物体配置情報を取得する物体配置情報取得手段と、
ユーザからの問い合わせ情報を入力する問い合わせ情報入力手段と、
前記物体配置情報及び前記問い合わせ情報を入力し、複数の物体の位置関係を表す物体配置特性を保持する物体配置特性データベースを用いて、前記問い合わせ情報に対する回答を予測する予測手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記物体配置情報取得手段が取得する前記物体配置情報は第一の物体配置情報であり、
前記問い合わせ情報に含まれる物体の配置関係は第二の物体配置情報であり、
前記予測手段は、前記物体配置特性データベースを用いて、前記第一の物体配置情報及び前記第二の物体配置情報に基づき前記問い合わせ情報に対する回答を予測する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記予測手段は、前記第一の物体配置情報と前記第二の物体配置情報の類似度に関する回答を予測する
ことを特徴とする請求項2に記載の情報処理装置
【請求項4】
前記予測手段は、前記物体配置特性データベースを用いて、前記第二の物体配置情報には含まれない、前記問い合わせ情報と関連する第三の物体配置情報を生成し、前記第一の物体配置情報、前記第二の物体配置情報及び前記第三の物体配置情報の類似度に基づき前記問い合わせ情報に対する回答を予測する
ことを特徴とする請求項2に記載の情報処理装置
【請求項5】
前記第一の物体配置情報は、さらに物体の時系列の位置関係情報からなる第一の時系列情報を含み、
前記予測手段は、前記物体配置特性データベースを用いて、前記問い合わせ情報に含まれる物体の時系列の位置関係情報からなる第二の時系列情報を、前記第二の物体配置情報と関連づけて生成し、前記第一の物体配置情報及び第二の物体配置情報の類似度と、前記第一および第二の時系列情報の類似度に基づいて、前記問い合わせ情報に対する回答を予測する
ことを特徴とする請求項2に記載の情報処理装置
【請求項6】
前記問い合わせ情報を複数保持する問い合わせ情報保持手段をさらに備え、
前記第二の物体配置情報は、前記問い合わせ情報保持手段が保持する複数の問い合わせ情報に含まれる物体の配置関係である
ことを特徴とする請求項2に記載の情報処理装置。
【請求項7】
前記予測手段は、前記物体配置特性データベースを用いて前記問い合わせ情報に含まれない不足情報を抽出し、前記不足情報を補足する前記問い合わせ情報を要求する回答を予測する
ことを特徴とする請求項2に記載の情報処理装置。
【請求項8】
前記予測手段は、前記問い合わせ情報に対する回答の信頼度を回答に関連付けて生成し、前記信頼度が所定値より低い場合には、前記問い合わせ情報に含まれない前記不足情報を補うように前記第二の物体配置情報を補足する前記問い合わせ情報を要求する回答を予測する
ことを特徴とする請求項7に記載の情報処理装置。
【請求項9】
センサが計測した計測情報を保持する計測情報保持手段と、
前記計測情報に基づき、前記物体配置情報を文章として生成する物体配置情報生成手段と、
前記物体配置情報生成手段が生成した前記物体配置情報を保持する物体配置情報保持手段と、
をさらに備え、
前記物体配置情報取得手段は、前記物体配置情報保持手段が保持する前記物体配置情報を
取得する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記物体配置情報は、現実空間を計測した計測情報に基づいて生成した、物体の物体種別及び配置関係を文章で表した文章情報である
ことを特徴とする請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
最近では、カメラやLiDARといったセンサで計測した画像情報や三次元形状情報から、画像認識や三次元形状認識により、画像情報や三次元形状情報に含まれる物体の種別や位置といった物体特性を機械が認識することができるようになっている。さらに、画像情報や三次元形状情報に何が含まれているかという現実空間の検索が実施できるようになりつつある。
【0003】
特許文献1では、画像から認識した人物の所定の動作を識別し、不審者を検知している。また特許文献2では、画像から識別した人物の関節位置を認識して、作業状況を認識している。
【先行技術文献】
【特許文献】
【0004】
特許第7111422号公報
特開2023-41969号公報
【非特許文献】
【0005】
Johnson et al. “DenseCap: Fully Convolutional Localization Networks for Dense Captioning”, CVPR2016
Ashish et al., “Attention is All you Need”, NeuralIPS2017
Jacob et al., “BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding, arXiv 2018
Yonghui Wu et al., “Google’s Neural Machine Translation System: Bridging the Gap between Human and Machine Translatio”, arXiv:1609.08144v2
Tateno et al., “CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction”, CVPR2019
Heng Wang et al., “Spatiality-guided Transformer for 3D Dense Captioning on Point Clouds”, IJCAI 2022
Charles R.Qi et al., “PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation”, CVPR2017
Shuquan et al., “3D Question Answering”, CVPR2021
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら従来の技術では、現実空間を検索するタスク毎に、データ収集、パラメータや条件の調整、及び認識した結果に対するシステムの応答動作の設定といった作業が煩雑であるという問題があった。
【0007】
本発明は以上を鑑みて、現実空間の検索を手間なく実施することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一実施形態の情報処理装置は、現実空間を計測した計測情報に基づいて生成した、物体の物体種別及び配置関係を含む物体配置情報を取得する物体配置情報取得手段と、ユーザからの問い合わせ情報を入力する問い合わせ情報入力手段と、前記物体配置情報及び前記問い合わせ情報を入力し、複数の物体の位置関係を表す物体配置特性を保持する物体配置特性データベースを用いて、前記問い合わせ情報に対する回答を予測する予測手段と、を備える。
【発明の効果】
【0009】
本発明によれば、現実空間の検索を手間なく実施することができる。
【図面の簡単な説明】
【0010】
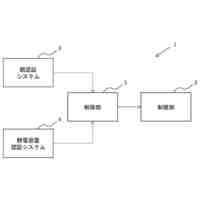
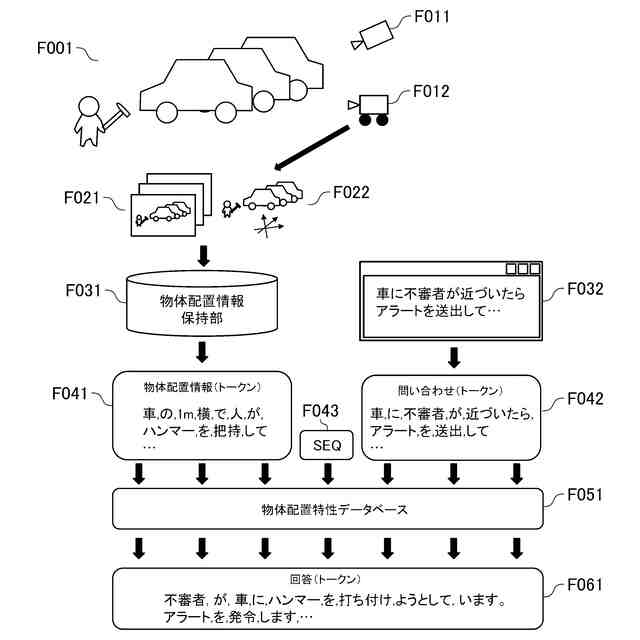
本発明の実施形態1に係る監視システムの使用場面と動作の概念を説明する図である。
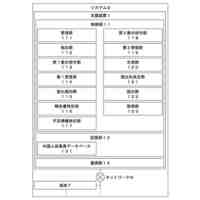
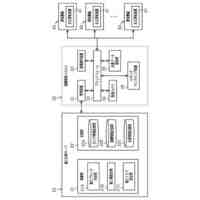
本発明の実施形態1に係る情報処理装置1の機能モジュール構成を示す図である。
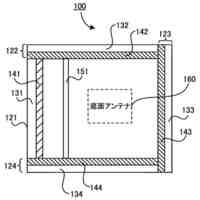
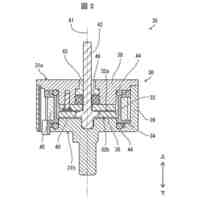
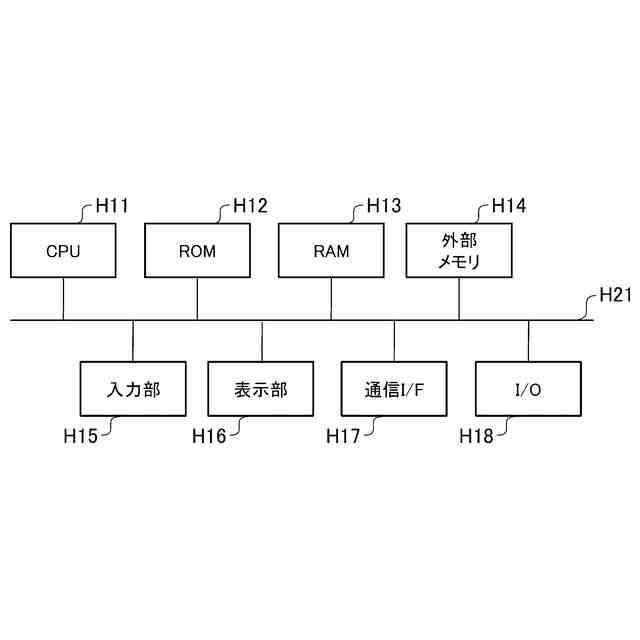
情報処理装置1のハードウェア構成を示す図である。
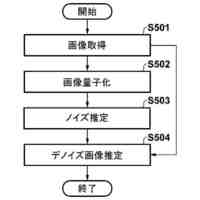
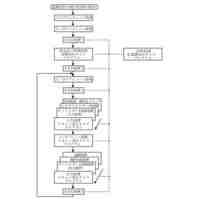
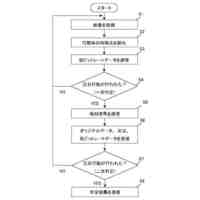
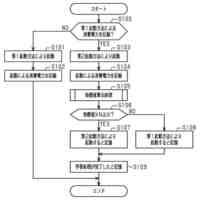
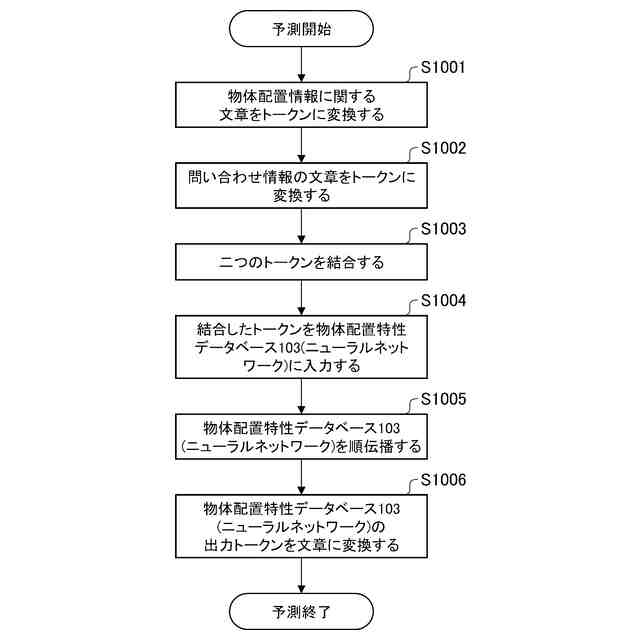
情報処理装置1の動作を説明するフローチャートである。
予測処理であるステップS104の処理の詳細を説明するフローチャートである。
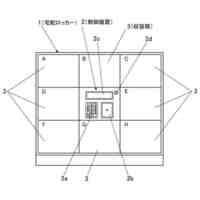
物体配置特性データベース103を利用して、予測部104が物体の配置関係を解釈し、回答を予測するステップS1005の処理事例を示した図である。
物体配置特性データベース103を利用して、予測部104が物体の配置関係を解釈し、回答を予測するステップS1005の処理事例を示した図である。
物体配置特性データベース103を利用して、予測部104が物体の配置関係を解釈し、回答を予測するステップS1005の処理事例を示した図である。
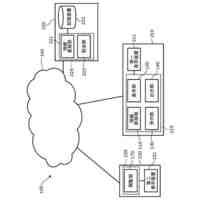
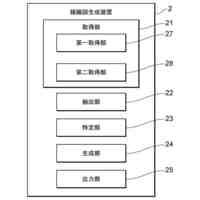
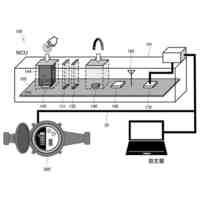
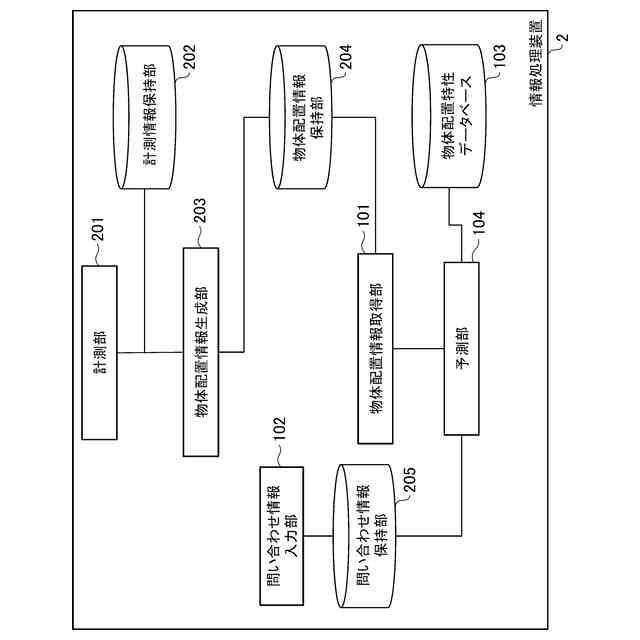
本発明の実施形態3に係る情報処理装置2を含む、現実空間の検索システムを示す図である。
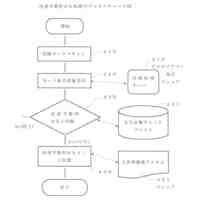
本発明の実施形態3に係る情報処理装置2の動作を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
情報処理装置、学習装置、および情報処理方法
今日
個人
物品給付年金
25日前
個人
政治のAI化
20日前
個人
在宅介護システム
1か月前
個人
RFタグ読取装置
1か月前
個人
プラグインホームページ
11日前
個人
AI飲食最適化プラグイン
1か月前
キヤノン株式会社
通信装置
26日前
個人
電話管理システム及び管理方法
1か月前
個人
全アルゴリズム対応型プログラム
21日前
キヤノン株式会社
画像処理装置
18日前
大同特殊鋼株式会社
輝線検出方法
20日前
シャープ株式会社
電子機器
20日前
株式会社CROSLAN
支援装置
1か月前
個人
決済手数料0%のクレジットカード
今日
株式会社アジラ
データ転送システム
20日前
トヨタ自動車株式会社
欠け検査装置
20日前
パテントフレア株式会社
交差型バーコード
13日前
ミサワホーム株式会社
情報処理装置
25日前
長屋印刷株式会社
画像形成システム
1か月前
トヨタ自動車株式会社
情報処理装置
3日前
村田機械株式会社
割当補助システム
3日前
ミサワホーム株式会社
宅配ロッカー
17日前
ひびきの電子株式会社
認証システム
1か月前
株式会社ユピテル
電子機器及びプログラム等
28日前
応研株式会社
業務支援システム
11日前
オベック実業株式会社
端末用スタンド
21日前
Sansan株式会社
組織図生成装置
6日前
トヨタ自動車株式会社
管理装置
17日前
オムロン株式会社
回転装置及びマウス
1か月前
個人
株管理システム
14日前
ミサワホーム株式会社
荷物搬送システム
17日前
株式会社カプコン
データおよびシステム
19日前
西日本電信電話株式会社
評価装置
12日前
シャープ株式会社
通信装置
10日前
株式会社大林組
施工管理システム
13日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ