TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086439
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200395
出願日
2023-11-28
発明の名称
磁気軸受の制御装置および制御方法
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
F16C
32/04 20060101AFI20250602BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】高い精度で固有振動モードのモード分離を可能とし、制御器の次数を小さくしたまま安定な制御器を設計できる磁気軸受の制御装置を提供する。
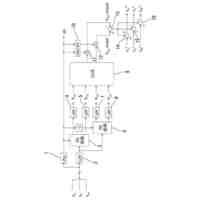
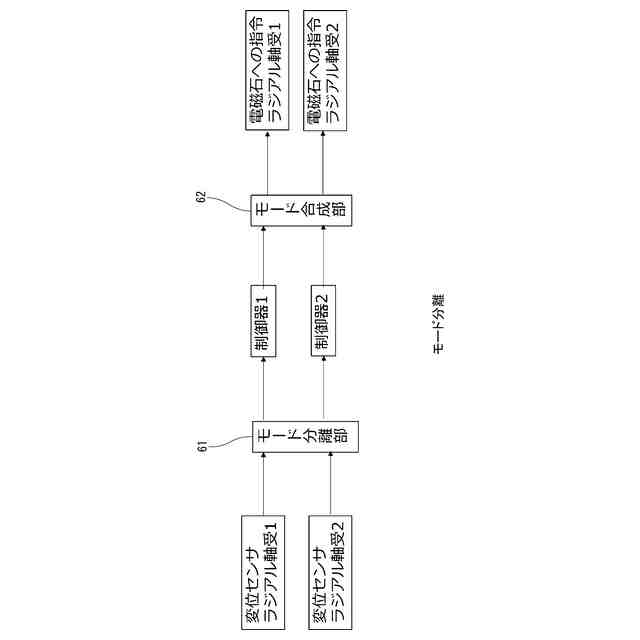
【解決手段】ラジアル磁気軸受1,2により制御される回転体のモデルについて、パラメータ推定部により質量行列、剛性行列、減衰行列のパラメータの同定および調整を行ったモード合成法モデルから、プラントを制御する制御器を除外して状態空間モデルを構築し、制御器1,2の入力側のモード分離部61は、ラジアル磁気軸受1,2からの変位センサの測定信号を入力してモード分離係数によってモード分離を行う。制御器1,2の出力側のモード合成部62は、モード合成係数によってモード合成を行い、ラジアル磁気軸受1,2の電磁石へ駆動指令信号(電流、電圧)を出力する。
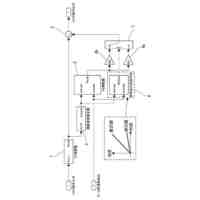
【選択図】 図14
特許請求の範囲
【請求項1】
磁気軸受により回転体を支持する磁気軸受装置において、
回転体および回転体の軸方向左右側に各々配置される電磁石を含むプラント、前記プラントを制御する制御器、電流制御のブロック、負ばね分の相殺ゲインのブロック、制御入力、外乱入力、評価出力、制御出力を備えて、前記制御出力から制御入力にフィードバックを施す、磁気軸受により制御される回転体のモデルを構築し、
前記回転体を浮上させゼロ回転の状態で、前記モデルの外乱入力に加振信号を重畳したときの前記評価出力を測定する加振試験を行って周波数応答のゼロ回転時の感度関数を取得し、前記回転体を浮上させ、不釣り合い加振力が無視できるような低速回転状態で、前記モデルの外乱入力に、前向きの加振信号(回転体の軸方向をzにとる右手系を考え、回転方向が反時計回りの場合x方向にAcos(ωt)、y方向にAsin(ωt)の大きさの加振信号)を重畳したときの前記評価出力を測定して周波数応答の低速回転時の感度関数を取得する感度関数取得部と、
前記取得されたゼロ回転時の感度関数から、前記磁気軸受で制御される回転体のモデル内の制御器、電流制御ブロック、負ばね分の相殺ゲインのブロックの既知のパラメータを代入した状態空間モデルの外乱入力に、加振信号を重畳したときに評価出力が設定信号となるように、モード合成法モデルの質量行列、剛性行列、減衰行列のパラメータの同定および調整を行い、
前記取得された低速回転時の感度関数から、前記磁気軸受で制御される回転体のモデル内の制御器、電流制御ブロック、負ばね分の相殺ゲインのブロックの既知のパラメータを代入した状態空間モデルの外乱入力に、前記加振信号を重畳したときに評価出力が設定信号となるように、モード合成法モデルのジャイロ行列のパラメータの同定および調整を行うパラメータ推定部と、
前記パラメータ推定部により質量行列、剛性行列、減衰行列のパラメータの同定および調整が行われたモード合成法モデルから、プラントを制御する制御器を除外して状態空間モデルを構築し、該状態空間モデルを用いて磁気軸受の位置でのモード形状を推定し、前記推定したモード形状から、モード制御を行う制御器の入力側のモード分離係数と、モード制御を行う制御器の出力側のモード合成係数とを求め、それらモード分離係数、制御器、モード合成係数を用いて、固有の振動モードを分離するモード分離処理を前記状態空間モデルに対して施し、モード分離系でのモード制御を行うモード制御部と、を備えたことを特徴とする磁気軸受の制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記感度関数取得部における加振試験の結果を基に、前記回転体のモデルの評価出力から制御出力までのプラントの伝達関数を測定し、該伝達関数をボード線図に展開して位相の周波数応答をプロットし、プラントの遅れ要素を、連続系のパデ(Pade)近似1次又はパデ(Pade)近似2次のうち少なくとも1つの近似の伝達関数により評価してむだ時間を推定した遅れ要素ブロックを求め、前記遅れ要素ブロックを、前記モード制御部で構築された状態空間モデルの制御出力側に追加したことを特徴とする請求項1に記載の磁気軸受の制御装置。
【請求項3】
前記遅れ要素ブロックのパデ(Pade)近似1次の伝達関数は次の式(57)
TIFF
2025086439000064.tif
50
166
であり、
前記遅れ要素ブロックのパデ(Pade)近似2次の伝達関数は次の式(58)
TIFF
2025086439000065.tif
50
166
である(ただし、Gφは遅れ要素の伝達関数、τ、τsはむだ時間)、
ことを特徴とする請求項2に記載の磁気軸受の制御装置。
【請求項4】
磁気軸受により回転体を支持する磁気軸受の制御方法において、
回転体および回転体の軸方向左右側に各々配置される電磁石を含むプラント、前記プラントを制御する制御器、電流制御のブロック、負ばね分の相殺ゲインのブロック、制御入力、外乱入力、評価出力、制御出力を備えて、前記制御出力から制御入力にフィードバックを施す、磁気軸受により制御される回転体のモデルを構築し、
感度関数取得部が、前記回転体を浮上させゼロ回転の状態で、前記モデルの外乱入力に加振信号を重畳したときの前記評価出力を測定する加振試験を行って周波数応答のゼロ回転時の感度関数を取得し、前記回転体を浮上させ、不釣り合い加振力が無視できるような低速回転状態で、前記モデルの外乱入力に、前向きの加振信号(回転体の軸方向をzにとる右手系を考え、回転方向が反時計回りの場合x方向にAcos(ωt)、y方向にAsin(ωt)の大きさの加振信号)を重畳したときの前記評価出力を測定して周波数応答の低速回転時の感度関数を取得するステップと、
パラメータ推定部が、前記取得されたゼロ回転時の感度関数から、前記磁気軸受で制御される回転体のモデル内の制御器、電流制御ブロック、負ばね分の相殺ゲインのブロックの既知のパラメータを代入した状態空間モデルの外乱入力に、加振信号を重畳したときに評価出力が設定信号となるように、モード合成法モデルの質量行列、剛性行列、減衰行列のパラメータの同定および調整を行うステップと、
パラメータ推定部が、前記取得された低速回転時の感度関数から、前記磁気軸受で制御される回転体のモデル内の制御器、電流制御ブロック、負ばね分の相殺ゲインのブロックの既知のパラメータを代入した状態空間モデルの外乱入力に、前記加振信号を重畳したときに評価出力が設定信号となるように、モード合成法モデルのジャイロ行列のパラメータの同定および調整を行うステップと、
モード制御部が、前記パラメータ推定部により質量行列、剛性行列、減衰行列のパラメータの同定および調整が行われたモード合成法モデルから、プラントを制御する制御器を除外して状態空間モデルを構築し、該状態空間モデルを用いて磁気軸受の位置でのモード形状を推定し、前記推定したモード形状から、モード制御を行う制御器の入力側のモード分離係数と、モード制御を行う制御器の出力側のモード合成係数とを求め、それらモード分離係数、制御器、モード合成係数を用いて、固有の振動モードを分離するモード分離処理を前記状態空間モデルに対して施し、モード分離系でのモード制御を行うモード制御ステップと、を備えたことを特徴とする磁気軸受の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気軸受制御技術に関し、特に、左右非対称な回転体を磁気軸受の電磁石で制御し、浮上させる技術に関する。
続きを表示(約 920 文字)
【背景技術】
【0002】
磁気軸受により回転体を支持する磁気軸受装置において、電磁石の電流を制御して回転体の位置を制御し浮上させる際に、回転体の軸の周波数応答を計測して制御器の周波数応答を調整する。
【0003】
従来、磁気軸受制御技術として、例えば特許文献1、非特許文献1、非特許文献2、非特許文献3に記載の技術が公開されていた。特許文献1には、有限要素法で解析した結果から低周波数の固有モードのモード重ね合わせでモデルを縮退したものを用いて制御器の設計を行うことが記載されている。
【0004】
非特許文献1には、ラジアル磁気軸受で回転体を磁気浮上させた状態で加振して「マグネティックハンマリング」と呼ばれる方法で回転体を診断する手法が紹介されている。
【0005】
非特許文献2には、磁気軸受弾性ロータの対称性を生かした磁気軸受弾性ロータのモード分離制御法が記載されている。
【0006】
非特許文献3には、左右非対称な回転体に対して有限要素法で両端を自由端条件にした固有の振動モードを求め、特定の固有の振動モードを分離する処理を行うことが記載されている。
【0007】
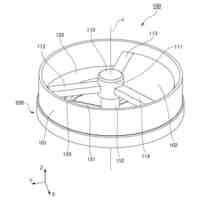
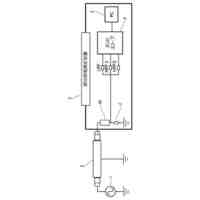
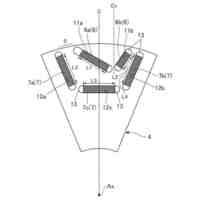
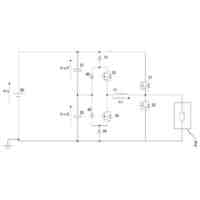
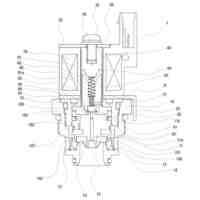
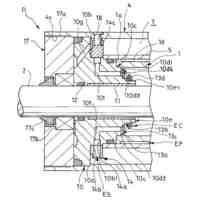
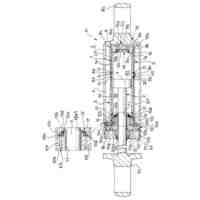
従来の磁気軸受装置の一例を図1に示す。図1は、曝気ブロワに用いられるインペラを有するラジアル磁気軸受装置を備えた回転電機の構成を示している。
【0008】
図1において、11は回転軸12の先端に設けられたインペラ(羽根車など)である。
【0009】
インペラ11から軸方向に所定距離隔てた回転軸12の外周には円板形状のスラストディスク13が固着されている。14はスラストディスク13のインペラ側に配設された電磁石、15はスラストディスク13の反インペラ側に、スラストディスク13を挟んで電磁石14と対向配設された電磁石である。
【0010】
インペラ11とスラストディスク13の間に位置する回転軸12の外周には、回転軸12を半径方向に非接触で支持するラジアル磁気軸受1が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
電動機
1か月前
株式会社明電舎
ドローン
2か月前
株式会社明電舎
電力変換器
18日前
株式会社明電舎
電力変換装置
25日前
株式会社明電舎
回転電機組立体
1か月前
株式会社明電舎
部分放電測定装置
9日前
株式会社明電舎
回転機の冷却構造
25日前
株式会社明電舎
セル多重インバータ
1か月前
株式会社明電舎
セル多重インバータ
1か月前
株式会社明電舎
バスバー固定構造、電力変換装置
1か月前
株式会社明電舎
埋込磁石型回転子および回転電機
3日前
株式会社明電舎
磁気軸受の制御装置および制御方法
1か月前
株式会社明電舎
情報通信装置の画面情報保存システム
5日前
株式会社明電舎
電力変換装置の制御装置および制御方法
1か月前
株式会社明電舎
トロリ線検測装置及びトロリ線検測方法
1か月前
株式会社明電舎
ACDC電源およびACDC電源の制御方法
2か月前
株式会社明電舎
真空インタラプタ,真空インタラプタの製造方法
1か月前
株式会社明電舎
案内部材、電気機器及び電気機器の組み立て方法
1か月前
株式会社明電舎
振動制御装置およびインバータおよび振動制御方法
11日前
株式会社明電舎
電力変換器
24日前
株式会社明電舎
コンデンサ温度推定装置、コンデンサ温度推定方法及び電力変換制御装置
27日前
株式会社明電舎
可動側通電軸の軸受構造,真空インタラプタ,真空インタラプタの製造方法
1か月前
株式会社明電舎
アキシャルギャップモータ用のロータ、アキシャルギャップモータ及びドローン
1か月前
個人
ホース保持具
3か月前
個人
トーションバー
4か月前
個人
差動歯車用歯形
1か月前
個人
ボルトナットセット
4か月前
株式会社不二工機
電磁弁
1か月前
株式会社不二工機
電磁弁
2か月前
個人
地震の揺れ回避装置
10日前
カヤバ株式会社
ダンパ
1か月前
カヤバ株式会社
緩衝器
27日前
カヤバ株式会社
緩衝器
27日前
カヤバ株式会社
緩衝器
4か月前
カヤバ株式会社
ダンパ
1か月前
株式会社三協丸筒
枠体
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ