TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089687
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204464
出願日
2023-12-04
発明の名称
トロリ線検測装置及びトロリ線検測方法
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G01B
11/08 20060101AFI20250609BHJP(測定;試験)
要約
【課題】トロリ線の摩耗領域を正確に検出するトロリ線検測装置及びトロリ線検測方法を提供する。
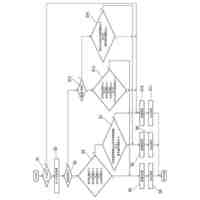
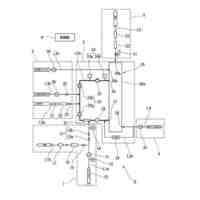
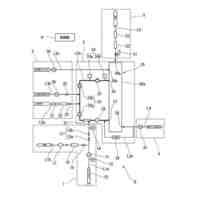
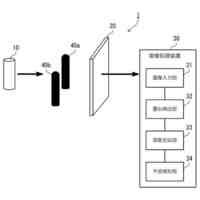
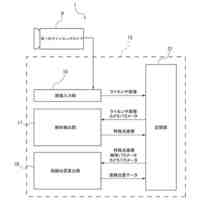
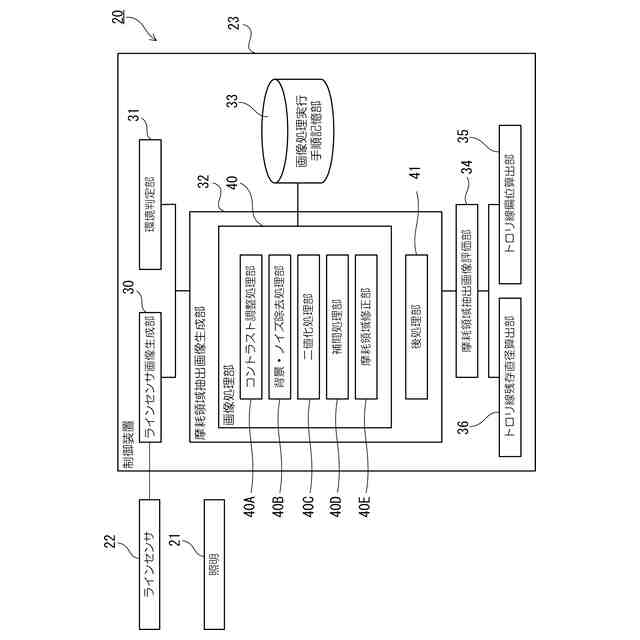
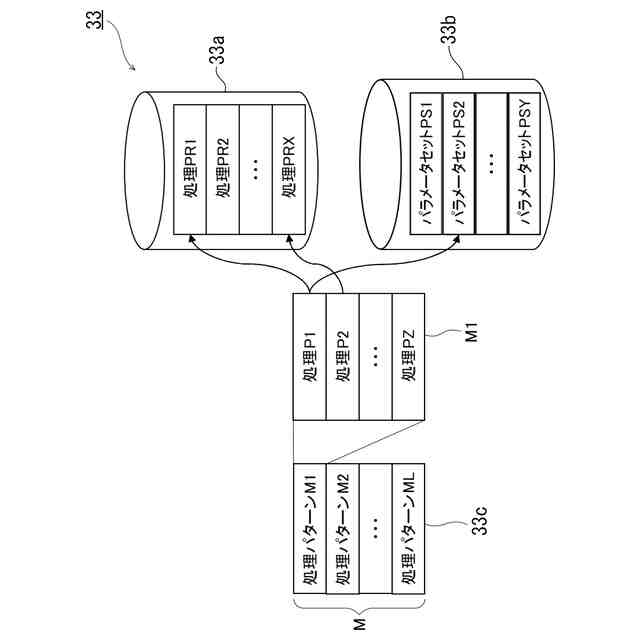
【解決手段】ラインセンサ画像生成部30は、ラインセンサ22により撮像された画像からラインセンサ画像を生成する。摩耗領域抽出画像生成部32は、画像処理実行手順記憶部33に登録されている複数の画像処理実行手順Mに従って画像処理を施してトロリ線の摩耗領域を抽出し、抽出された摩耗領域から外側に走査して輝度値が予め設定された輝度値以下になった位置を摩耗領域の境界とすることで摩耗領域を修正し、複数の画像処理実行手順Mの各々に対応した複数の摩耗領域抽出画像を生成する。摩耗領域抽出画像評価部34は、複数の摩耗領域抽出画像のうち最も評価値の高い摩耗領域抽出画像を選択する。トロリ線偏位算出部35及びトロリ線残存直径算出部36は、選択された摩耗領域抽出画像に基づいてトロリ線の偏位、残存直径を算出する。
【選択図】図2
特許請求の範囲
【請求項1】
トロリ線を撮像するラインセンサを備え、当該ラインセンサにより撮像された画像を入力画像としてこれを基に前記トロリ線を検測する、トロリ線検測装置であって、
前記入力画像を時系列的に並べてラインセンサ画像を生成する、ラインセンサ画像生成部と、
当該ラインセンサ画像に対して複数の画像処理機能を順次実行するのに際し、その実行順序が、画像処理実行手順として複数登録された、画像処理実行手順記憶部と、
前記複数の画像処理実行手順の各々に従って、前記ラインセンサ画像を入力として前記複数の画像処理機能を実行することにより、前記トロリ線の摩耗領域を抽出し、前記抽出されたトロリ線の摩耗領域から外側に走査して輝度値が予め設定された輝度値以下になった位置を摩耗領域の境界とすることで前記摩耗領域を修正し、前記複数の画像処理実行手順の各々に対応した複数の摩耗領域抽出画像を生成する、摩耗領域抽出画像生成部と、
前記複数の摩耗領域抽出画像の各々の評価値を計算して最も評価値の高い摩耗領域抽出画像を選択する、摩耗領域抽出画像評価部と、
前記選択された最も評価値の高い前記摩耗領域抽出画像を基に、前記トロリ線の残存直径と偏位のいずれか一方または双方を算出する、トロリ線検測部と、
を備える、ことを特徴とするトロリ線検測装置。
続きを表示(約 1,300 文字)
【請求項2】
前記複数の画像処理実行手順の各々には、0以上のコントラスト調整処理と、0以上の背景・ノイズ除去処理と、1以上の二値化処理と、及び0以上の補間処理が、この順に実行されるように登録されている、ことを特徴とする請求項1に記載のトロリ線検測装置。
【請求項3】
前記複数の画像処理実行手順の各々には優先度が対応付けられて記憶されており、
前記摩耗領域抽出画像評価部は、同一の前記評価値が複数の前記摩耗領域抽出画像に対して算出された場合には、前記優先度が高い前記画像処理実行手順に対応した前記摩耗領域抽出画像を、前記最も評価値の高い前記摩耗領域抽出画像として選択する、ことを特徴とする請求項1または2に記載のトロリ線検測装置。
【請求項4】
前記摩耗領域抽出画像評価部は、前記複数の摩耗領域抽出画像の各々に対し、前記摩耗領域の数を計算し、前記摩耗領域の数と、実際の前記トロリ線の本数との差が小さい場合に、前記評価値が高くなるように前記評価値を計算する、ことを特徴とする請求項3に記載のトロリ線検測装置。
【請求項5】
前記摩耗領域抽出画像評価部は、前記複数の摩耗領域抽出画像の各々に対し、前記摩耗領域が前記トロリ線に近い画像上の特徴を有することを示す指標であるトロリ線尤度を計算し、当該トロリ線尤度が高い場合に、前記評価値が高くなるように前記評価値を計算する、ことを特徴とする請求項3に記載のトロリ線検測装置。
【請求項6】
前記画像処理実行手順記憶部には、前記ラインセンサにより前記画像を撮像する際の複数の異なる環境の各々に対応して、前記画像処理実行手順が登録され、
前記ラインセンサ画像を基に、前記入力画像が撮像された前記環境を判定する環境判定部を更に備え、
前記摩耗領域抽出画像生成部は、判定された前記環境に対応する前記画像処理実行手順に従って前記摩耗領域抽出画像を生成する、ことを特徴とする請求項1に記載のトロリ線検測装置。
【請求項7】
トロリ線を撮像するラインセンサにより撮像された画像を入力画像としてこれを基に前記トロリ線を検測する、トロリ線検測方法であって、
前記入力画像を時系列的に並べてラインセンサ画像を生成すること、
当該ラインセンサ画像に対して複数の画像処理機能を順次実行するのに際し、その実行順序が、画像処理実行手順として複数登録され、当該複数の画像処理実行手順の各々に従って、前記ラインセンサ画像を入力として前記複数の画像処理機能を実行することにより、前記トロリ線の摩耗領域を抽出すること、
前記抽出されたトロリ線の摩耗領域から外側に走査して輝度値が予め設定された輝度値以下になった位置を摩耗領域の境界とすることで前記摩耗領域を修正し、前記複数の画像処理実行手順の各々に対応した複数の摩耗領域抽出画像を生成すること、
前記複数の摩耗領域抽出画像の各々の評価値を計算して最も評価値の高い摩耗領域抽出画像を選択すること、
前記選択された最も評価値の高い前記摩耗領域抽出画像を基に、前記トロリ線の残存直径と偏位のいずれか一方または双方を算出すること、を含むことを特徴とするトロリ線検測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トロリ線検測装置及びトロリ線検測方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
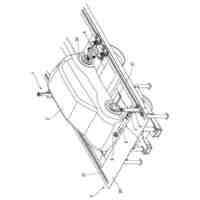
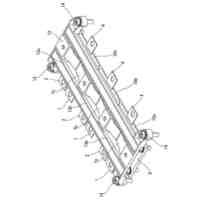
電気鉄道車両は、線路上を走行するに際し、線路の上方に設けられたトロリ線からパンタグラフ等の集電装置を介して給電されることで、動力を得る。電気鉄道車両が通過するたびに、集電装置がトロリ線の下面に対して滑動する。このため、電気鉄道車両を継続して運用すると、トロリ線は徐々に摩耗し、最終的には破断する。したがって、トロリ線には摩耗限界が設定されており、トロリ線の残存直径が管理値を下回った場合には、トロリ線は新品に交換される。一方、集電装置の接触部も摩耗するため、接触部が一か所に集中しないように、トロリ線はレール直角方向にジグザグに偏位させて設置しており、この偏位量も管理されている。これらの、トロリ線の検査測定を作業員が手作業で行うには、多大な手間を要する。
【0003】
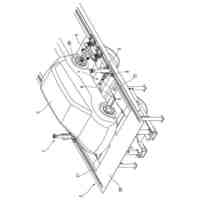
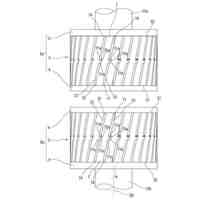
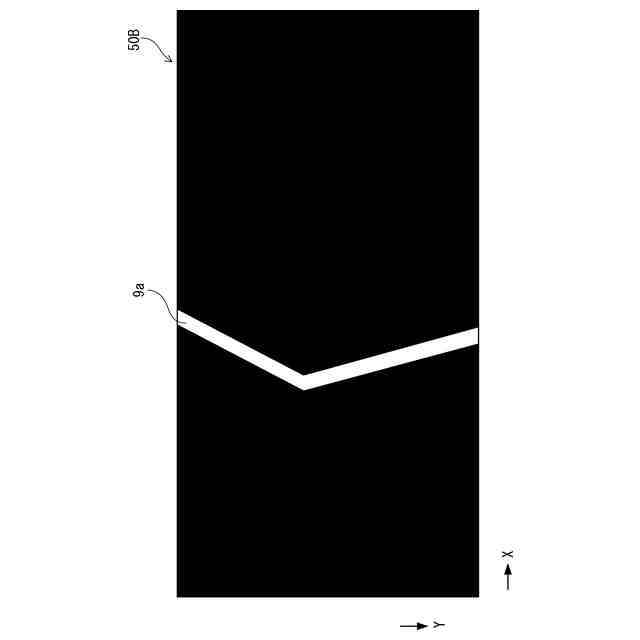
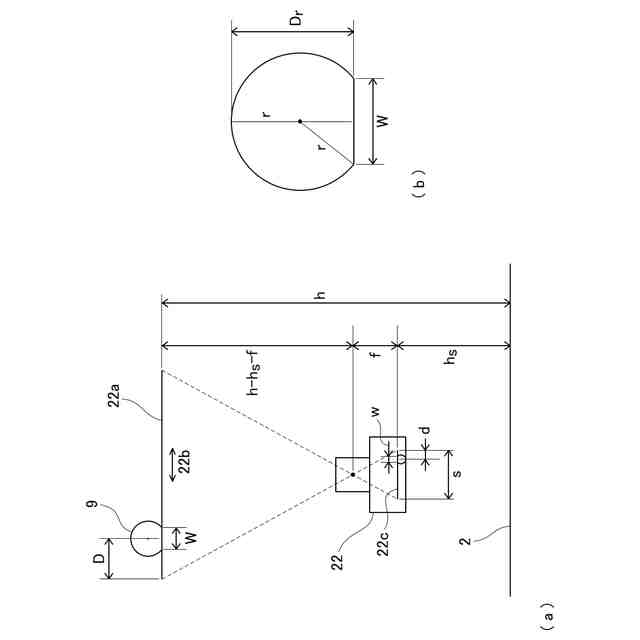
例えば、特許文献1には、電気鉄道車両の上方にトロリ線の下側に位置する摩耗領域を照射する照明と、当該照明により照射されたトロリ線の摩耗領域(パンタグラフが接触する摺動面)を撮像するラインセンサとを備える自動検測装置が開示されている。より具体的には、ラインセンサを上向きに走査線がトロリ線を横切るように設け、当該ラインセンサにより撮像された画像を時系列的に並べてラインセンサ画像を生成する。そして、このラインセンサ画像に画像処理を適用した上で、例えばトロリ線の高さや太さ等のトロリ線の仕様に関する既知のデータを用いることで、トロリ線の偏位や残存直径等を計算する。
【先行技術文献】
【特許文献】
【0004】
特許第5287177号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような装置においては、照明や、トロリ線の摩耗領域の状態、撮影環境などに起因して、ラインセンサ画像におけるトロリ線の摩耗領域の輝度に差が生じる場合があり、摩耗領域を正確に取得することができないという問題がある。
【0006】
そこで本発明は、トロリ線の摩耗領域を正確に検出することが可能なトロリ線検測装置及びトロリ線検測方法を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、第1の発明に係るトロリ線検測装置は、トロリ線を撮像するラインセンサを備え、当該ラインセンサにより撮像された画像を入力画像としてこれを基に前記トロリ線を検測する、トロリ線検測装置であって、前記入力画像を時系列的に並べてラインセンサ画像を生成する、ラインセンサ画像生成部と、当該ラインセンサ画像に対して複数の画像処理機能を順次実行するのに際し、その実行順序が、画像処理実行手順として複数登録された、画像処理実行手順記憶部と、前記複数の画像処理実行手順の各々に従って、前記ラインセンサ画像を入力として前記複数の画像処理機能を実行することにより、前記トロリ線の摩耗領域を抽出し、前記抽出されたトロリ線の摩耗領域から外側に走査して輝度値が予め設定された輝度値以下になった位置を摩耗領域の境界とすることで前記摩耗領域を修正し、前記複数の画像処理実行手順の各々に対応した複数の摩耗領域抽出画像を生成する、摩耗領域抽出画像生成部と、前記複数の摩耗領域抽出画像の各々の評価値を計算して最も評価値の高い摩耗領域抽出画像を選択する、摩耗領域抽出画像評価部と、前記選択された最も評価値の高い前記摩耗領域抽出画像を基に、前記トロリ線の残存直径と偏位のいずれか一方または双方を算出する、トロリ線検測部と、を備えることを特徴とする。
【0008】
また、第2の発明に係るトロリ線検測装置は、前記複数の画像処理実行手順の各々には、0以上のコントラスト調整処理と、0以上の背景・ノイズ除去処理と、1以上の二値化処理と、及び0以上の補間処理が、この順に実行されるように登録されていることを特徴とする。
【0009】
また、第3の発明に係るトロリ線検測装置は、前記複数の画像処理実行手順の各々には優先度が対応付けられて記憶されており、前記摩耗領域抽出画像評価部は、同一の前記評価値が複数の前記摩耗領域抽出画像に対して算出された場合には、前記優先度が高い前記画像処理実行手順に対応した前記摩耗領域抽出画像を、前記最も評価値の高い前記摩耗領域抽出画像として選択する、ことを特徴とする。
【0010】
また、第4の発明に係るトロリ線検測装置は、前記摩耗領域抽出画像評価部は、前記複数の摩耗領域抽出画像の各々に対し、前記摩耗領域の数を計算し、前記摩耗領域の数と、実際の前記トロリ線の本数との差が小さい場合に、前記評価値が高くなるように前記評価値を計算することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社明電舎
回転機
9日前
株式会社明電舎
回転電機
2か月前
株式会社明電舎
回転電機
22日前
株式会社明電舎
回転電機
15日前
株式会社明電舎
ドローン
12日前
株式会社明電舎
回転電機
24日前
株式会社明電舎
車両固定装置
9日前
株式会社明電舎
電力変換装置
24日前
株式会社明電舎
電力変換装置
1か月前
株式会社明電舎
電力変換装置
1か月前
株式会社明電舎
電力変換装置
22日前
株式会社明電舎
車両固定装置
9日前
株式会社明電舎
負荷発生装置
1か月前
株式会社明電舎
ロータ及び回転機
9日前
株式会社明電舎
電力系統システム
1か月前
株式会社明電舎
電力系統システム
12日前
株式会社明電舎
センサ固定用治具
10日前
株式会社明電舎
オゾン水の生成装置
9日前
株式会社明電舎
オゾン水の生成装置
9日前
株式会社明電舎
オゾン水の生成装置
9日前
株式会社明電舎
軸受及びそれを備えた回転機
1か月前
株式会社明電舎
電極構造,真空インタラプタ
1か月前
株式会社明電舎
電極構造,真空インタラプタ
22日前
株式会社明電舎
遮断器のリンク機構、遮断器
10日前
株式会社明電舎
不良検知装置及び不良検知方法
12日前
株式会社明電舎
電流センサおよび電力変換装置
1か月前
株式会社明電舎
異常検知システム及び異常検知方法
1か月前
株式会社明電舎
ロータ、回転電機及び車両駆動用装置
2日前
株式会社明電舎
半導体モジュールおよび電力変換装置
16日前
株式会社明電舎
機械学習支援装置及び機械学習支援方法
1か月前
株式会社明電舎
架線位置計測装置及び架線位置計測方法
16日前
株式会社明電舎
水冷式回転機のフレーム、及びその製造方法
10日前
株式会社明電舎
目標車速パターンデータ生成方法及び試験方法
12日前
株式会社明電舎
電力変換装置および電力変換装置のゲート指令生成方法
9日前
株式会社明電舎
電子装置
1か月前
株式会社明電舎
出力調整機構、電界放射装置及び電界放射装置の出力制御方法
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ