TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085296
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199074
出願日
2023-11-24
発明の名称
レーダ装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
G01S
7/40 20060101AFI20250529BHJP(測定;試験)
要約
【課題】方位誤差量を高精度に算出可能なレーダ装置を提供する。
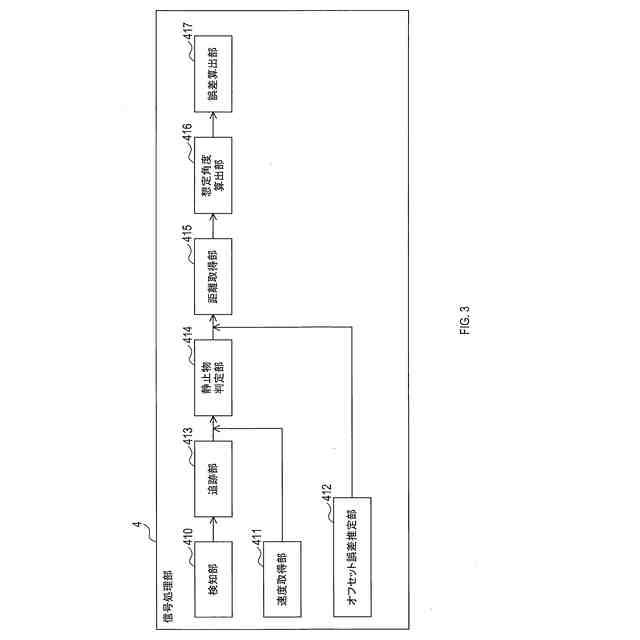
【解決手段】レーダ装置は、移動体80に搭載されており、検知部410と、速度取得部411と、追跡部413と、静止物判定部414と、距離取得部415と、想定角度算出部416と、誤差算出部417と、を備える。追跡部は、第1の物体と同一と判定された少なくとも一つの物体に対応する物体情報の時系列を取得する。距離取得部は、第1の物体が静止物であると判定された場合に、取得された物体情報の時系列のうち、車両が第1の物体の真横を通過した時に取得された第1の距離を取得する。想定角度算出部は、取得された第1の距離と、今回時刻に検知された第2の距離とに基づいて、想定角度を算出する。誤差算出部は、今回時刻に検知された第1の方位角度における方位誤差量として、算出された想定角度と第1の方位角度との差分を算出する。
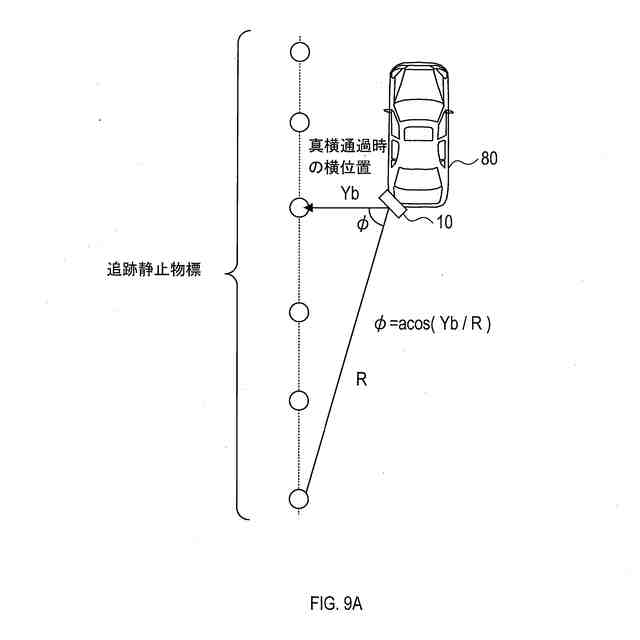
【選択図】図9A
特許請求の範囲
【請求項1】
移動体(80)に搭載されたレーダ装置(10)であって、
所定の時間間隔で、送受信したレーダ波に基づいて前記移動体の周辺の検知領域に存在する物体の距離、相対速度、及び方位角度を含む物体情報を検知するように構成された検知部(410)と、
前記移動体の速度を取得するように構成された速度取得部(411)と、
(i)今回時刻に前記検知部により検知された物体情報に対応する第1の物体が、前回時刻に前記検知部により検知された物体情報に対応する物体のいずれかと同一か判定し、且つ、(ii)今回時刻に前記検知部により検知された前記物体情報と、過去に前記検知部により検知された前記物体情報であって、前記第1の物体と同一と判定された少なくとも一つの物体に対応する前記物体情報とを含む、物体情報の時系列を取得するように構成された追跡部(413)と、
前記検知部により検知された前記物標情報に含まれる前記相対速度及び前記方位角度と、前記速度取得部により取得された前記車両の速度とに基づいて、前記第1の物体が静止物か判定するように構成された静止物判定部(414)と、
前記静止物判定部により前記第1の物体が静止物であると判定された場合に、前記追跡部により取得された前記物体情報の時系列のうち、前記車両が前記第1の物体の真横を通過した時に取得された前記物体情報に含まれる前記距離に相当する第1の距離を取得するように構成された距離取得部(415)と、
前記距離取得部により取得された前記第1の距離と、今回時刻に前記検知部により検知された前記物標情報に含まれる第2の距離とに基づいて、想定角度を算出するように構成された想定角度算出部(416)と、
方位角度毎に方位誤差量を算出するように構成された誤差算出部であって、今回時刻に前記検知部により検知された前記物標情報に含まれる第1の方位角度における前記方位誤差量として、前記想定角度算出部により算出された前記想定角度と前記第1の方位角度との差分を算出するように構成されている誤差算出部(417)と、を備える、
レーダ装置。
続きを表示(約 1,000 文字)
【請求項2】
前記距離取得部(415)は、前記物体情報の時系列から前記車両の走行方向における縦距離の時系列を算出し、算出された前記縦距離の時系列において前記縦距離が最小である時に基づいて、前記車両が前記第1の物体の真横を通過した時を判定するように構成されている、
請求項1に記載のレーダ装置。
【請求項3】
前記距離取得部(415)は、前記物体情報の時系列に含まれる前記相対速度の時系列において前記相対速度が最もゼロに近い時に基づいて、前記車両が前記第1の物体の真横を通過した時を判定するように構成されている、
請求項1又は2に記載のレーダ装置。
【請求項4】
前記距離取得部(415)は、前記物体情報の時系列に含まれる前記距離の時系列において前記距離が最小である時に基づいて、前記車両が前記第1の物体の真横を通過した時を判定するように構成されている、
請求項1又は2に記載のレーダ装置。
【請求項5】
前記レーダ装置(10)の軸ずれに対応する前記方位角度のオフセット誤差量を推定するように構成されたオフセット誤差推定部(412)を更に備え、
前記距離取得部(415)は、前記オフセット誤差推定部により推定された前記オフセット誤差量に基づいて、前記縦距離の時系列の各々を補正し、補正された前記縦距離の時系列において前記縦距離が最小である時に基づいて、前記車両が前記第1の物体の真横を通過した時を判定するように構成されている、
請求項2に記載のレーダ装置。
【請求項6】
前記距離取得部は、(i)前記物体情報の時系列から算出された前記車両の走行方向における縦距離の時系列において前記縦距離が最小であること、(ii)前記物体情報の時系列に含まれる前記相対速度の時系列において前記相対速度が最もゼロに近いこと、(iii)前記物体情報の時系列に含まれる前記距離の時系列において前記距離が最小であること、のうちの少なくとも2つの条件を満たす時に基づいて、前記車両が前記第1の物体の真横を通過した時を判定するように構成されている、
請求項1に記載のレーダ装置。
【請求項7】
前記誤差算出部(417)は、前記移動体が直線走行している場合に、前記方位誤差量を算出するように構成されている、
請求項1に記載のレーダ装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体の方位角度を測定する技術に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
引用文献1に記載の物体検出装置は、レーダ装置から送信された送信波の反射波に基づいて、第1物標の第1距離及び第1方位角度と、第2物標の第2距離とを導出している。第1物標及び第2物標は、車両の進行方向に対して平行に並び、第2物標は、車両の真横に位置する。更に、上記物体検出装置は、第1距離と第2距離とに基づいて、第1物標の想定される方位角度である第2方位角度を導出し、第1方位角度と第2方位角度との差分を算出している。そして、上記物体検出装置は、反射波に基づいて導出された方位角度を、上記差分を用いて補正している。
【先行技術文献】
【特許文献】
【0003】
特許第6933986号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
実際の走行環境に存在する路側物は、必ずしも車両の走行方向に平行に並んでいない。上記物体検出装置は、第1物標と第2物標が車両の進行方向に対して平行に並んでいることを想定しているため、実際の走行環境に適用すると、方位誤差である差分の推定に誤差が生じる。
【0005】
本開示は、方位誤差量を高精度に算出可能なレーダ装置を提供する。
【課題を解決するための手段】
【0006】
本開示の1つの局面のレーダ装置は、移動体(80)に搭載されており、検知部(410)と、速度取得部(411)と、追跡部(413)と、静止物判定部(414)と、距離取得部(415)と、想定角度算出部(416)と、誤差算出部(417)と、を備える。検知部は、所定の時間間隔で、送受信したレーダ波に基づいて移動体の周辺の検知領域に存在する物体の距離、相対速度、及び方位角度を含む物体情報を検知する。速度取得部は、移動体の速度を取得する。追跡部は、(i)今回時刻に検知部により検知された物体情報に対応する第1の物体が、前回時刻に検知部により検知された物体情報に対応する物体のいずれかと同一か判定し、且つ、(ii)今回時刻に検知部により検知された物体情報と、過去に検知部により検知された物体情報であって、第1の物体と同一と判定された少なくとも一つの物体に対応する物体情報とを含む、物体情報の時系列を取得する。静止物判定部は、検知部により検知された物標情報に含まれる相対速度及び方位角度と、速度取得部により取得された車両の速度とに基づいて、第1の物体が静止物か判定する。距離取得部は、静止物判定部により第1の物体が静止物であると判定された場合に、追跡部により取得された物体情報の時系列のうち、車両が第1の物体の真横を通過した時に取得された物体情報に含まれる距離に相当する第1の距離を取得する。想定角度算出部は、距離取得部により取得された第1の距離と、今回時刻に検知部により検知された物標情報に含まれる第2の距離とに基づいて、想定角度を算出する。誤差算出部は、方位角度毎に方位誤差量を算出する。誤差算出部は、今回時刻に検知部により検知された物標情報に含まれる第1の方位角度における方位誤差量として、想定角度算出部により算出された想定角度と第1の方位角度との差分を算出する。
【0007】
本開示の1つの局面におけるレーダ装置は、同一の静止物の物標情報の時系列を取得する。同一の静止物について検知された位置は、車両の挙動に応じて時間変化する。したがって、車両の挙動に基づいて、同一の静止物について検知された位置の時間変化が推定され、位置の時間変化を考慮した第1の距離が取得される。そして、第1の距離と第2の距離とに基づいて、想定角度が算出される。したがって、上記レーダ装置は、物体の配置又は形状による誤差を抑制して、想定角度を算出することができる。ひいては、上記レーダ装置は、方位誤差量を高精度に算出することができる。
【図面の簡単な説明】
【0008】
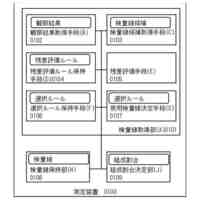
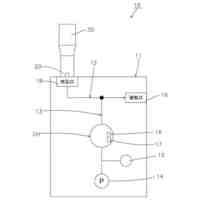
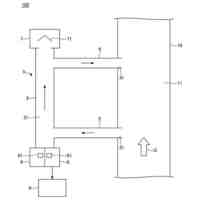
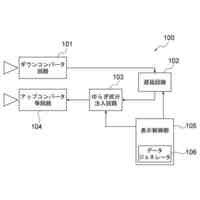
第1実施形態に係るレーダ装置の構成を示すブロック図である。
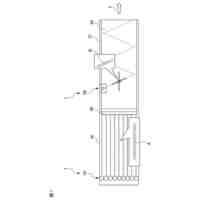
第1実施形態に係るレーダ装置の検知範囲を示す図である。
第1実施形態に係る信号処理部の機能を示すブロック図である。
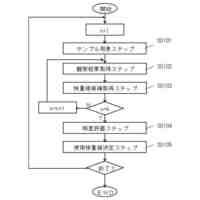
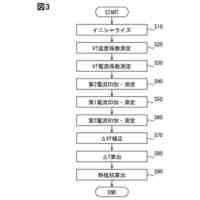
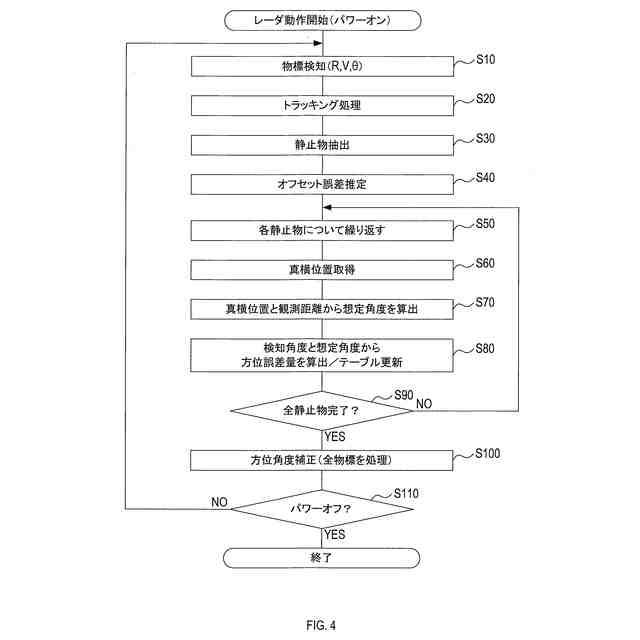
第1実施形態に係る信号処理部が実行する方位誤差量算出処理を示すフローチャートである。
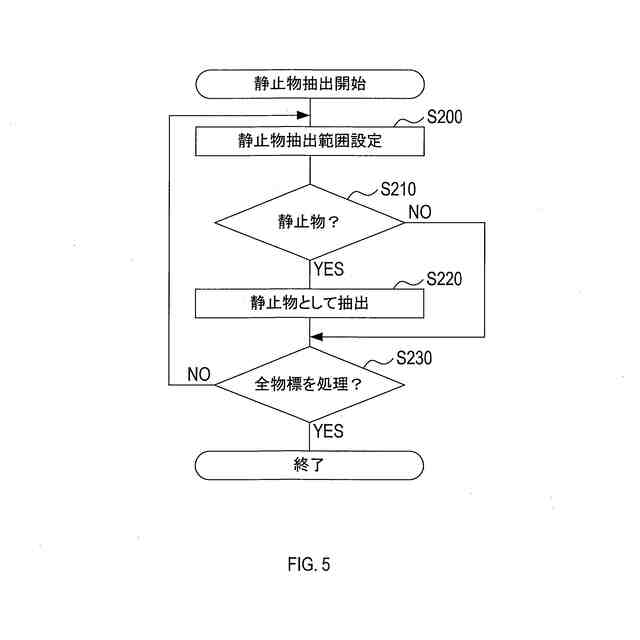
第1実施形態に係る信号処理部が実行する静止物抽出処理を示すフローチャートである。
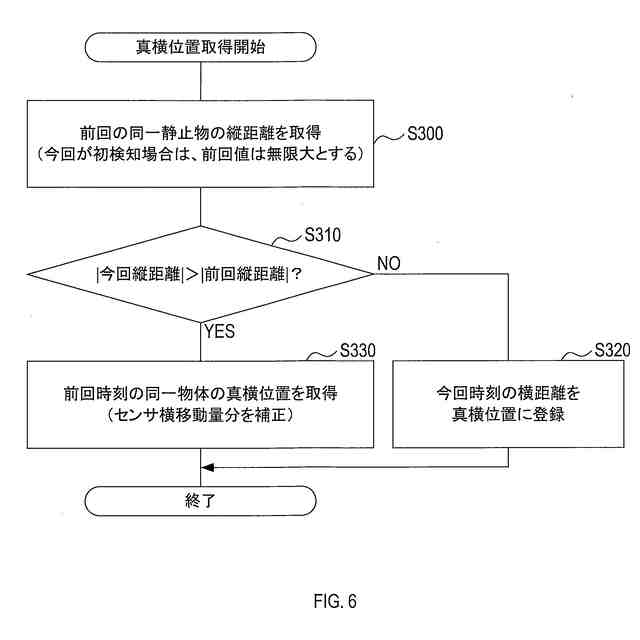
第1実施形態に係る真横位置取得処理を示すフローチャートである。
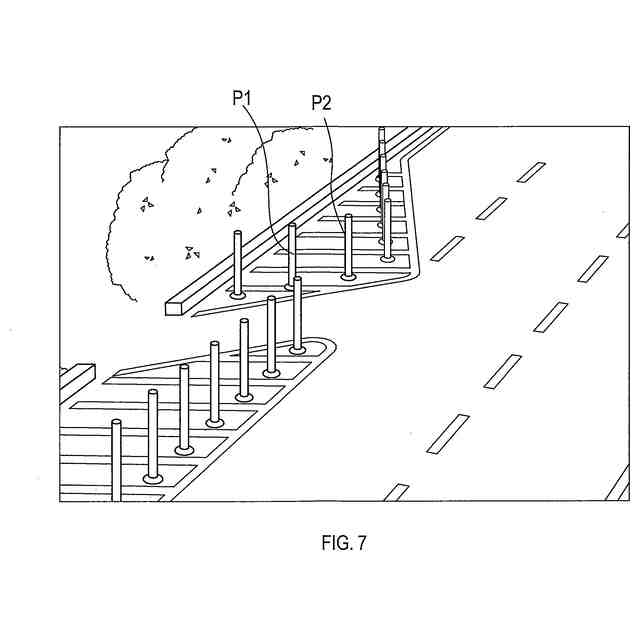
路側物が道路に非平行に並んでいる様子を示す図である。
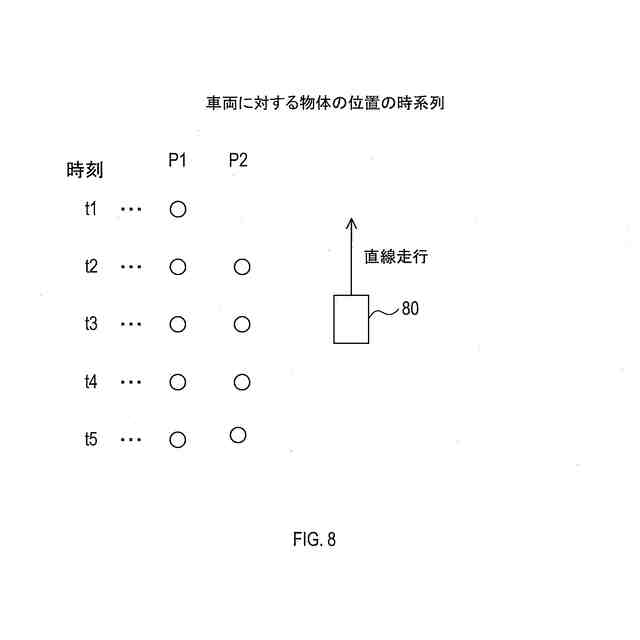
第1実施形態に係るレーダ装置で検知された路側物の位置の時系列を示す図である。
第1実施形態に係る想定角度を算出する手法を示す図である。
参考例に係る想定角度を算出する手法を示す図である。
第1実施形態に係る補正前の水平方位と、方位誤差量と、補正後の水平方位と、を示す図である。
第1実施形態に係る方位誤差量の推定値と、測定した方位誤差量の真値とを示す図である。
第2実施形態に係る信号処理部が実行する真横位置取得処理を示すフローチャートである。
第3実施形態に係る信号処理部が実行する真横位置取得処理を示すフローチャートである。
第4実施形態に係る信号処理部が実行する方位誤差量算出処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら、本開示の実施形態を説明する。
(第1実施形態)
<1-1.構成>
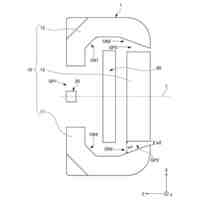
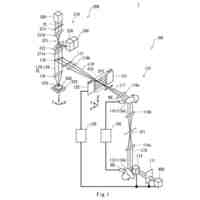
図1~3を参照して、本実施形態に係るレーダ装置10の構成について説明する。本実施形態では、レーダ装置10は、車両80に搭載される。具体的には、レーダ装置10は、車両80の前方中央(例えば、前方バンパ内の中央)、車両80の左前側方及び右前側方(例えば、前方バンパ内の左端及び右端)、車両80の左後側方及び右後側方(例えば、後方バンパ内の左端及び右端)に搭載される。上記5か所に搭載されたレーダ装置10は、それぞれ、車両80の前方中央、左前方、右前方、左後方及び右後方の検知領域Rdを有する。これら5台のレーダ装置10は、すべてが車両80に搭載されている必要はない。5台のレーダ装置10のうちの1台だけが車両80に搭載されていてもよいし、2台以上が車両80に搭載されていてもよい。あるいは、6台以上のレーダ装置10が車両80に搭載されていてもよい。また、別の実施形態では、レーダ装置10は、航空機、船、電車など、車両80以外の移動体に搭載されてもよい。
【0010】
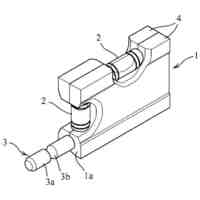
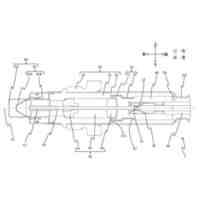
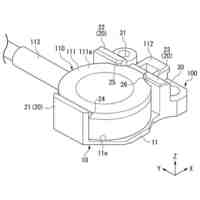
レーダ装置10は、送受信部2と信号処理部4とを備える。送受信部2は、送信アンテナと、受信アンテナと、を備える。送信アンテナは、信号処理部4により設定された所定の周期で繰り返しレーダ波を送信する。受信アンテナは、送信されたレーダ波が物体に反射して生じた反射波を受信して、受信した反射波に基づいた受信信号を信号処理部4へ送る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
水準器
23日前
株式会社チノー
測定装置
5日前
日本碍子株式会社
ガスセンサ
23日前
個人
浸透探傷試験方法
19日前
株式会社不二越
塵埃噴射装置
18日前
株式会社東芝
センサ
18日前
トヨタ自動車株式会社
制御装置
19日前
日本精機株式会社
二酸化炭素濃度測定器
3日前
日本特殊陶業株式会社
ガスセンサ
18日前
株式会社チノー
検量線の取得方法
5日前
日本特殊陶業株式会社
ガスセンサ
17日前
学校法人 中央大学
管内径推定装置
9日前
個人
多段電磁加速による高力積衝撃試験機
11日前
TDK株式会社
アレイセンサ
19日前
東洋紡株式会社
ヘムタンパク質の安定化方法
12日前
キヤノン株式会社
光学装置
2日前
TDK株式会社
温度センサ
22日前
栗田工業株式会社
水処理システム
22日前
個人
簡易・迅速タンパク質検出装置および方法
19日前
株式会社村田製作所
厚み測定装置
5日前
NISSHA株式会社
ガス検出器
1日前
本田技研工業株式会社
車載検出器
5日前
スズキ株式会社
ECU交換診断システム
2日前
ローム株式会社
加速度センサ
19日前
株式会社 システムスクエア
検査選別装置
19日前
株式会社アイシン
電流センサ
2日前
トヨタ自動車株式会社
鋳巣の強度評価方法
9日前
株式会社北斗測量設計社
測量用ポール座標軸設置台
5日前
株式会社荏原製作所
センサホルダ
15日前
株式会社デンソー
熱抵抗測定方法
12日前
レーザーテック株式会社
検査装置及び検査方法
5日前
富士電機株式会社
レーザ式ガス分析装置
16日前
三菱重工業株式会社
中空試験片
22日前
金井重要工業株式会社
粘度測定具及びスプーン
1日前
キーコム株式会社
レーダテストシステム
23日前
株式会社デンソーウェーブ
三次元計測装置
18日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ