TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084003
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197730
出願日
2023-11-21
発明の名称
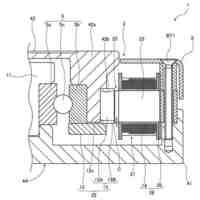
同期電動機の制御装置
出願人
Astemo株式会社
代理人
弁理士法人開知
主分類
H02P
21/24 20160101AFI20250526BHJP(電力の発電,変換,配電)
要約
【課題】同期電動機が急加速又は急減速しても位相差θeの精度が確保される同期電動機の制御装置を提供する。
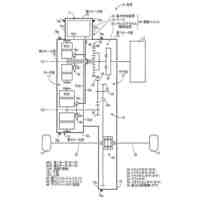
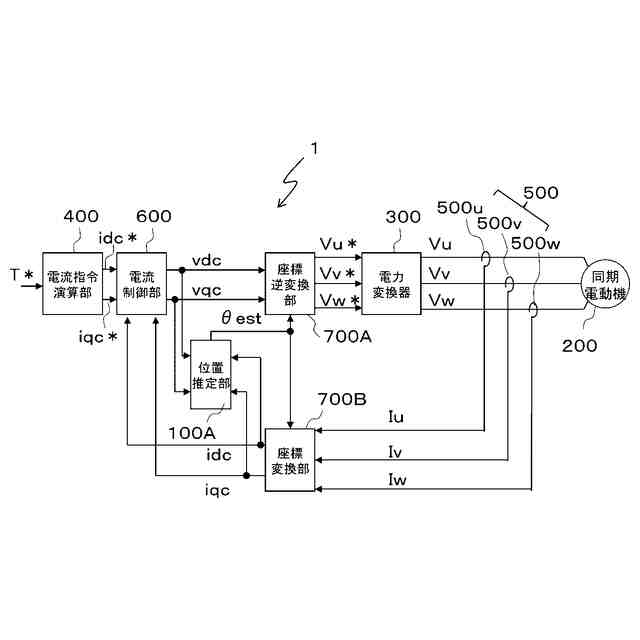
【解決手段】同期電動機200の制御装置1は、同期電動機200の回転子位置をd軸、d軸から90度進んだ軸をq軸とし、d軸とθeの位相差を持つ軸をdc軸、dc軸から90度進んだ軸をqc軸とし、dc軸の位相(回転子位置推定値θest)を用いて同期電動機200を制御する。同期電動機200の制御装置1のプロセッサは、d軸の角速度(電気角速度真値ω)の近似値を用いずに、dc軸及びqc軸の電圧(電圧指令vdc、vqc)と、dc軸の角速度(電気角速度推定値ω^)と、同期電動機200の特性値(抵抗値R、静的q軸インダクタンスLq)と、dc軸及びqc軸の磁束(Φdc、Φqc)と、を用いてθeを演算する。
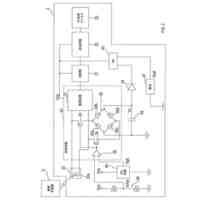
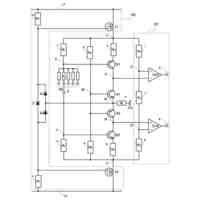
【選択図】図1
特許請求の範囲
【請求項1】
同期電動機の回転子位置をd軸、前記d軸から90度進んだ軸をq軸とし、前記d軸と位相差θeを持つ軸をdc軸、前記dc軸から90度進んだ軸をqc軸とし、前記dc軸の位相を用いて前記同期電動機を制御する同期電動機の制御装置であって、
前記d軸の角速度の近似値を用いずに、前記dc軸及び前記qc軸の電圧と、前記dc軸の角速度と、前記同期電動機の特性値と、前記dc軸及び前記qc軸の磁束と、を用いて前記位相差θeを演算するプロセッサを有する同期電動機の制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
さらに前記dc軸及び前記qc軸の磁束微分値を用いて前記位相差θeを演算する
ことを特徴とする同期電動機の制御装置。
【請求項3】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
前記dc軸及び前記qc軸の磁束と前記同期電動機の特性値によって表される前記dc軸及び前記qc軸の電圧の電圧方程式に基づいて、前記dc軸及び前記qc軸の磁束を演算する
ことを特徴とする同期電動機の制御装置。
【請求項4】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
前記同期電動機の駆動指令であるdc軸及びqc軸の磁束指令値と前記dc軸及び前記qc軸の磁束との差を用いて、前記dc軸及び前記qc軸の磁束微分値を演算する
ことを特徴とする同期電動機の制御装置。
【請求項5】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
qc軸電流とq軸インダクタンスの積と、dc軸電流とq軸インダクタンスの積と、前記dc軸及び前記qc軸の磁束を用いて前記位相差θeを演算する
ことを特徴とする同期電動機の制御装置。
【請求項6】
請求項1に記載の同期電動機の制御装置であって、
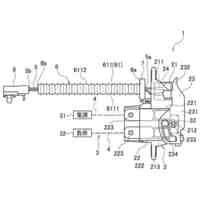
前記同期電動機は、前記同期電動機の回転子位置を検出するための位置センサを備え、
前記プロセッサは、
前記位相差θeから前記dc軸の位相の推定値を演算し、
前記同期電動機が駆動している期間に、前記dc軸の位相の推定値と、前記位置センサによって検出された回転子位置を比較し、前記位置センサの異常の有無を判定する
ことを特徴とする同期電動機の制御装置。
【請求項7】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
前記dc軸及び前記qc軸の電流と前記dc軸及び前記qc軸の磁束との対応関係を定義するテーブルを用いて、前記dc軸及び前記qc軸の磁束を導出する
ことを特徴とする同期電動機の制御装置。
【請求項8】
請求項1に記載の同期電動機の制御装置であって、
前記プロセッサは、
前記dc軸及び前記qc軸の電流と、q軸インダクタンスと、前記dc軸及びqc軸の磁束を用いて位相差θeを演算する
ことを特徴とする同期電動機の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、同期電動機の制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
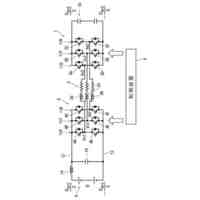
ハイブリッド自動車や電気自動車に代表される電動化車両は、車両の駆動源として回転子に永久磁石を備えた永久磁石同期モータ(以下、同期電動機)が用いられることが多い。このような同期電動機を駆動し制御するためには、一般に電力変換器であるインバータが用いられている。そして、インバータにより同期電動機のトルクを制御する方法として、一般に電流ベクトル制御が知られている。電流ベクトル制御を行うためには、同期電動機の回転子の磁極位置を正確に把握する必要がある。この磁極位置を把握する手段の一つとして、位置センサであるレゾルバが同期電動機に設けられることが多い。
【0003】
ところが、レゾルバを同期電動機に備えることにより、システムの部品数の増加・大型化・コストの増加を招いている。
【0004】
また、レゾルバには位置信号を出力するための出力巻線が巻かれており、その断線や短絡によって故障する恐れがあるため、システムの信頼性低下をも招いている。
【0005】
そこで、レゾルバなどのセンサを使用せずに同期電動機を駆動する技術として、位置センサレスベクトル制御が知られている。
【0006】
位置センサレスベクトル制御は、同期電動機に印加する電圧や、電圧によって流れる電流などの情報に基づいて回転子の位置情報を得て電流ベクトル制御を行うものである。レゾルバなどの位置センサが不要となるため、システムの大型化・コストの増加・信頼性の低下を防ぐことができる。この回転子位置を推定する手法は、同期電動機のインダクタンスの位置依存性に基づく方法と、同期電動機の誘起電圧に基づく方法に大別される。同期電動機の誘起電圧がゼロ或いは小さくなる低速領域では前者が用いられ、誘起電圧が高くなる中高速領域では後者の方法に切り替えて位置センサレス制御を実施することが一般に知られている。
【0007】
中高速領域における同期電動機の位置センサレス制御として、拡張誘起電圧に基づく方法(特許文献1)が開示されている。また、特許文献2では、同期電動機の速度範囲に関わらず高精度に位置を推定可能とした、磁束に基づく方法も開示されている。
【先行技術文献】
【特許文献】
【0008】
特開2001-251889号公報
特開2009-284558号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1では、同期電動機の回転子位置をd軸、d軸に直交する軸をq軸とし、これらdq軸とθeの位相差がある座標系をdc-qc軸と定義し、拡張誘起電圧を推定することでθeの情報を得て位置センサレス制御を実施している。ところが、拡張誘起電圧は同期電動機の速度が中高速領域とならないと精度良く検出できない課題があった。
【0010】
これに対し特許文献2では、同期電動機の電圧方程式に基づいて、同期電動機の電圧指令値、電流検出値、電流推定値を用いて磁束を推定するオブザーバを構成し、オブザーバによって得られる磁束推定値を利用して位置を推定している。回転子に永久磁石を備えた同期電動機においては、永久磁石による鎖交磁束が速度に依存せず常に発生しているため、これを利用することで幅広い速度範囲で位置センサレスを実現するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電システム
24日前
マグネデザイン株式会社
ロータ
17日前
トヨタ自動車株式会社
予測方法
11日前
株式会社豊田自動織機
モータ冷却装置
17日前
株式会社セイワ
車両用配線カバー
2日前
日産自動車株式会社
発電機
23日前
株式会社ダイヘン
充電装置
19日前
トヨタ自動車株式会社
電池制御装置
6日前
住友電装株式会社
電気接続箱
24日前
マツダ株式会社
電力変換装置
24日前
住友電装株式会社
電気接続箱
24日前
住友電装株式会社
電気接続箱
12日前
住友電装株式会社
電気接続箱
12日前
ダイハツ工業株式会社
曲げ加工装置
13日前
株式会社ミツバ
回転電機
24日前
富士電機株式会社
リニアモータ
2日前
株式会社ダイヘン
電圧調整装置
19日前
トヨタ自動車株式会社
ステータ
24日前
株式会社デンソー
携帯機
17日前
株式会社力電
配線スペース低減型の切替盤
16日前
トヨタ自動車株式会社
電磁鋼板の成形方法
18日前
ナブテスコ株式会社
駆動装置
6日前
トヨタ自動車株式会社
駆動ユニット
9日前
株式会社ゲットクリーンエナジー
モーター
24日前
日本精工株式会社
モータ
25日前
株式会社エフ・シー・シー
太陽光発電装置
2日前
サンデン株式会社
電力変換装置
5日前
矢崎総業株式会社
電線保護構造
19日前
トヨタ自動車株式会社
車両の制御装置
16日前
株式会社アイシン
電力変換装置
11日前
神崎産業株式会社
漏電検出装置
3日前
トヨタ自動車株式会社
車両の制御装置
2日前
株式会社明電舎
ドローン
19日前
トヨタ紡織株式会社
電機子の製造装置
20日前
株式会社デンソー
電力変換装置
18日前
愛知電機株式会社
固定子コア、固定子および電動機
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ