TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081135
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194694
出願日
2023-11-15
発明の名称
水深測定システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G01C
13/00 20060101AFI20250520BHJP(測定;試験)
要約
【課題】冠水の水深を効率よく推定する。
【解決手段】車両12に搭載された撮像手段12aは、冠水時及び平常時に、第1位置及び第2位置においてそれぞれ車両外部空間を撮像することで第1撮像画像及び第2撮像画像を取得する。特徴点検出手段16aは、第1撮像画像及び前記第2撮像画像から、冠水面と物体との境界上にある特徴点を検出する。高さ演算手段16bは、特徴点から撮像手段12aまでの高さを演算する。水深推定手段16cは、高さ演算手段16bが演算した高さと、平常時における地面から撮像手段12aまでの高さとを比較することで、冠水の水深を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両に搭載された撮像手段であって、冠水時に、第1位置において車両外部空間を撮像することで第1撮像画像を取得し、前記第1位置から離間した第2位置において車両外部空間を撮像することで第2撮像画像を取得する撮像手段と、
前記第1撮像画像及び前記第2撮像画像から、冠水面と物体との境界上にある特徴点を検出する特徴点検出手段と、
前記特徴点から前記撮像手段までの高さを演算する高さ演算手段と、
前記高さ演算手段が演算した前記高さと、平常時における地面から前記撮像手段までの高さとを比較することで、前記冠水の水深を推定する水深推定手段と、
を備えることを特徴とする水深測定システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、水深測定システムを開示する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、浸水深を把握したいエリアにおいて全ての地点の浸水深を測定しなくても、一部の地点の測定点があればその他の地点の水深を推定できる推論プログラムが開示されている。特許文献1における推論プログラムのモデルは水深の実測値と流体解析により学習される。
【先行技術文献】
【特許文献】
【0003】
特開2022-23651号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示される水深測定システムの目的は、冠水の水深を効率よく推定することにある。
【課題を解決するための手段】
【0005】
本明細書で開示される水深測定システムは、車両に搭載された撮像手段であって、冠水時に、第1位置において車両外部空間を撮像することで第1撮像画像を取得し、前記第1位置から離間した第2位置において車両外部空間を撮像することで第2撮像画像を取得する撮像手段と、前記第1撮像画像及び前記第2撮像画像から、水面と物体との境界上にある特徴点を検出する特徴点検出手段と、前記特徴点から前記撮像手段までの高さを演算する高さ演算手段と、前記高さ演算手段が演算した前記高さと、平常時における地面から前記撮像手段までの高さとを比較することで、前記冠水の水深を推定する水深推定手段と、を備えることを特徴とする。
【発明の効果】
【0006】
本明細書で開示される水深測定システムによれば、冠水の水深を効率よく推定することができる。
【図面の簡単な説明】
【0007】
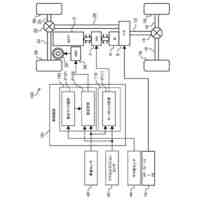
本実施形態に係る水深測定システムの構成概略図である。
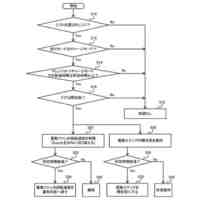
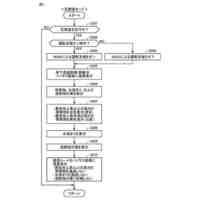
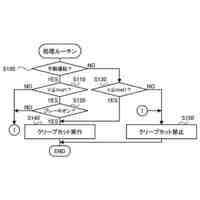
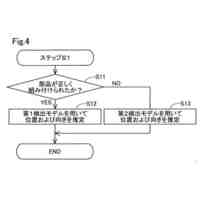
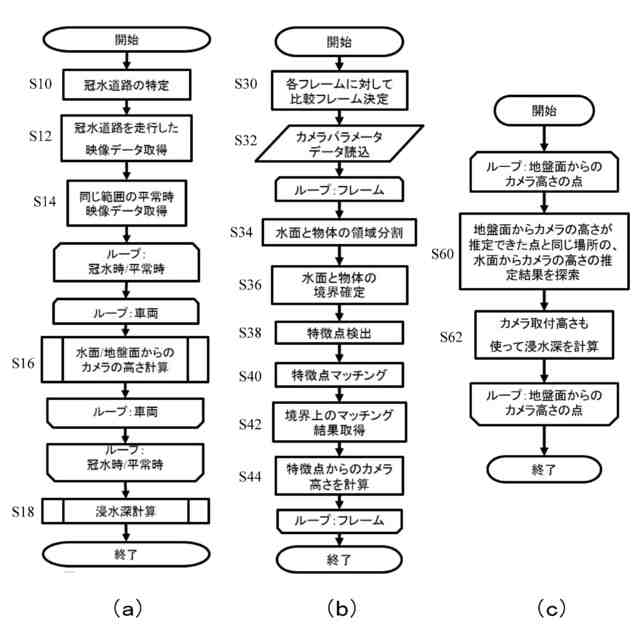
本実施形態に係る水深測定システムの処理の流れを示すフローチャートである。
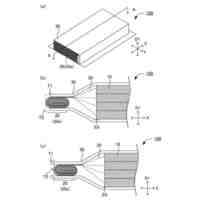
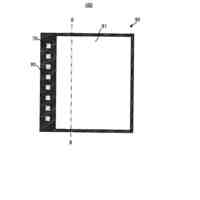
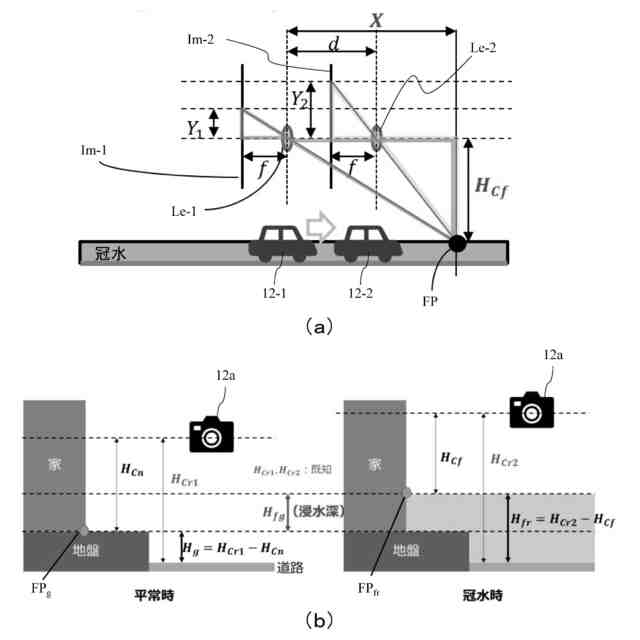
本実施形態において水深の推定に用いるパラメータを表す図である。
【発明を実施するための形態】
【0008】
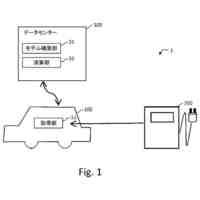
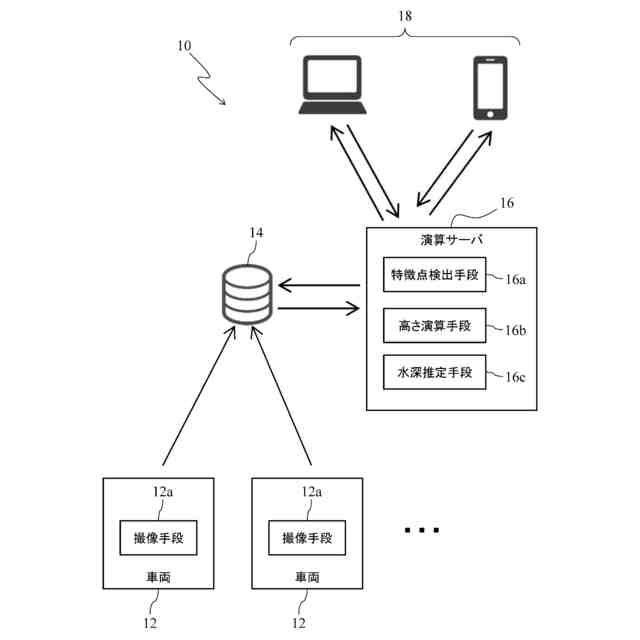
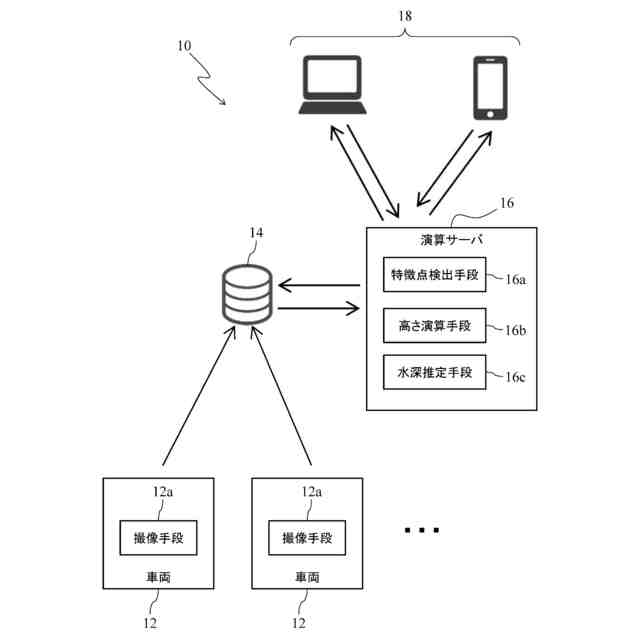
図1は、本実施形態に係る水深測定システム10の構成概略図である。水深測定システム10は、1又は複数の車両12、データ保存サーバ14、演算サーバ16、及び、ユーザ端末18を含んで構成される。
【0009】
車両12は、例えばカメラなどの撮像手段12aを備える。撮像手段12aにより、車両12の外部空間が撮像される。具体的には、撮像手段12aにより、冠水時においては冠水の水面(以下「冠水面」と記載する)を含む撮像画像が撮像され、平常時(冠水していないとき)においては地面を含む撮像画像が撮像される。また、撮像手段12aは、第1位置において撮像することで第1撮像画像を取得し、車両12が移動後、第1位置とは異なる第2位置において撮像することで第2撮像画像を取得する。撮像手段12aにより撮像された撮像画像は、無線通信などによってデータ保存サーバ14に送信され、データ保存サーバ14に蓄積記憶される。演算サーバ16は、データ保存サーバ14に記憶された撮像画像に基づいて、冠水の水深(以下、単に「水深」と記載する)を推定する。演算サーバ16は、特徴点検出手段16a、高さ演算手段16b、及び、水深推定手段16cを備える。演算サーバ16による水深の推定処理の詳細については後述する。ユーザ端末18は、水深測定システム10のユーザが使用するコンピュータであり、例えばPCやスマートフォンである。ユーザは、水深の推定結果を得たいエリアや時間などの条件をリクエストとして演算サーバ16に送信することで、演算サーバ16による推定結果をユーザ端末18にて受け取る。
【0010】
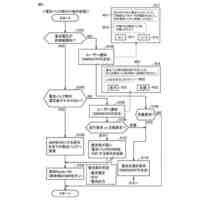
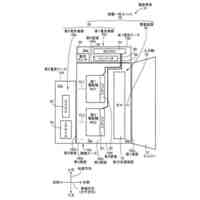
図2は、本実施形態に係る水深測定システム10の処理の流れを示すフローチャートである。まず、図2(a)を参照して、水深測定システム10の処理の大まかな流れを説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
金型
17日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
ステータ
12日前
トヨタ自動車株式会社
駆動装置
29日前
トヨタ自動車株式会社
二次電池
17日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
ステータ
17日前
トヨタ自動車株式会社
ステータ
17日前
トヨタ自動車株式会社
予測方法
3日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
関節機構
3日前
トヨタ自動車株式会社
ステータ
16日前
トヨタ自動車株式会社
内燃機関
1日前
トヨタ自動車株式会社
ステータ
5日前
トヨタ自動車株式会社
集合導線
18日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
蓄電セル
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ