TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081126
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194681
出願日
2023-11-15
発明の名称
歩行型作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
33/08 20060101AFI20250520BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】操作の簡略化を行うことが可能でありながら、操作上の安定性を確保することが可能な歩行型作業機を提供する。
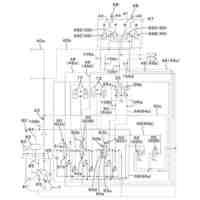
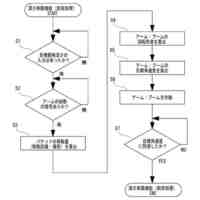
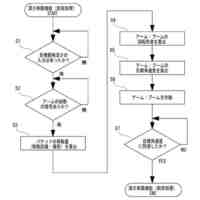
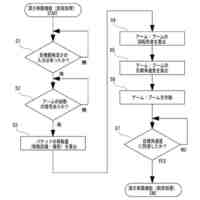
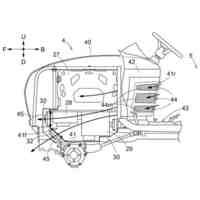
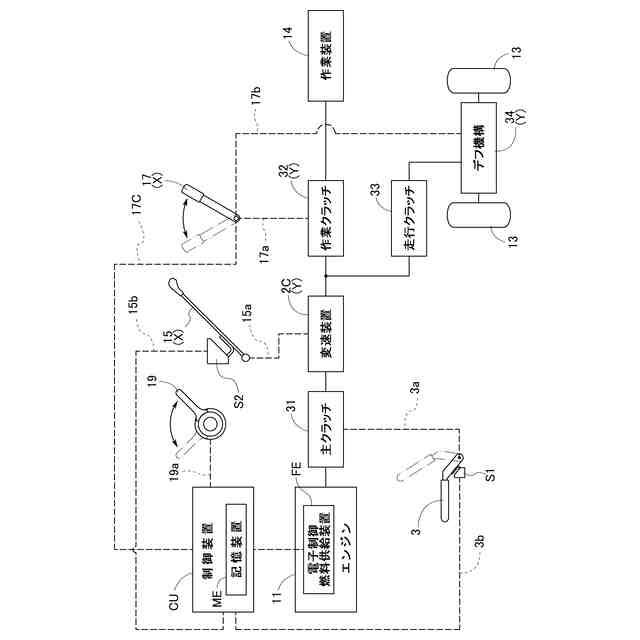
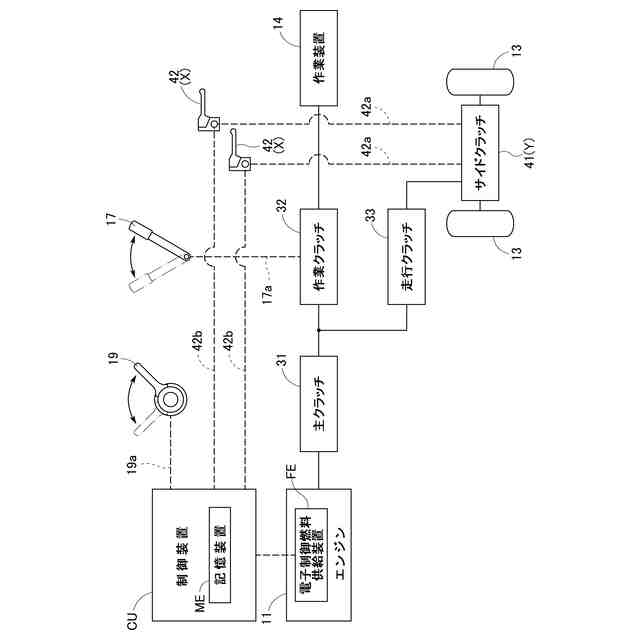
【解決手段】出力回転を変更可能な駆動源11と、人為操作により第1操作状態と第2操作状態とに切り換え可能な操作具Xと、操作具Xの操作により作動状態が切り換わる被操作装置Yと、駆動源11の作動を制御する制御装置CUと、が備えられ、制御装置CUは、操作具Xが第1操作状態から第2操作状態に切り換わると、駆動源11の出力回転を設定速度に向けて漸増させる。
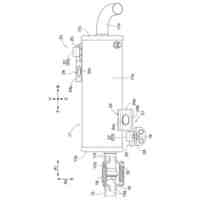
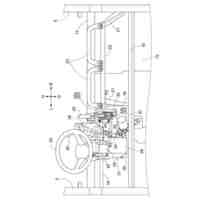
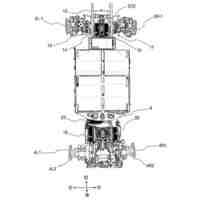
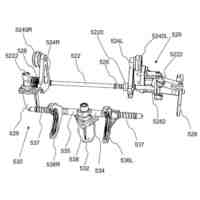
【選択図】図3
特許請求の範囲
【請求項1】
出力回転を変更可能な駆動源と、
人為操作により第1操作状態と第2操作状態とに切り換え可能な操作具と、
前記操作具の操作により作動状態が切り換わる被操作装置と、
前記駆動源の作動を制御する制御装置と、が備えられ、
前記制御装置は、前記操作具が前記第1操作状態から前記第2操作状態に切り換わると、前記駆動源の出力回転を設定速度に向けて漸増させる歩行型作業機。
続きを表示(約 1,000 文字)
【請求項2】
前記被操作装置として、旋回用作動状態と直進用作動状態とに切り換え可能な旋回用操作装置が備えられ、
前記旋回用操作装置は、前記操作具が前記第1操作状態から前記第2操作状態に切り換わると、前記旋回用作動状態から前記直進用作動状態に切り換わる請求項1に記載の歩行型作業機。
【請求項3】
前記旋回用操作装置が作業装置への動力伝達を入り切りする作業クラッチであり、前記旋回用作動状態がクラッチ切り状態であり、前記直進用作動状態がクラッチ入り状態である請求項2に記載の歩行型作業機。
【請求項4】
左右の走行装置が備えられ、
前記旋回用操作装置が左右の前記走行装置に対するデフ機構であり、
前記旋回用作動状態が左右の前記走行装置の差動を規制しない状態であり、前記直進用作動状態が左右の前記走行装置の差動を規制する状態である請求項2に記載の歩行型作業機。
【請求項5】
前記制御装置は、前記操作具が前記第2操作状態から前記第1操作状態に切り換わると、前記駆動源の出力回転を前記設定速度より低速の旋回用速度に低下させる請求項2に記載の歩行型作業機。
【請求項6】
前記被操作装置として、前進状態と後進状態とに切り換え可能な前後進切換機構が備えられ、
前記前後進切換機構は、前記操作具が前記第1操作状態から前記第2操作状態に切り換わると、前記後進状態から前記前進状態に切り換わる請求項1に記載の歩行型作業機。
【請求項7】
人為操作により前記駆動源の目標速度を設定する目標速度設定手段が備えられ、
前記制御装置は、
前記操作具が前記第1操作状態から前記第2操作状態に切り換わると、前記駆動源の出力回転を前記目標速度より低速の中立用速度に低下させ、
前記操作具が前記第2操作状態から前記第1操作状態に切り換わると、前記駆動源の出力回転を前記中立用速度から前記設定速度としての前記目標速度に向けて漸増させる請求項6に記載の歩行型作業機。
【請求項8】
前記駆動源は、電子制御燃料供給装置を備えるエンジンである請求項1から7のいずれか一項に記載の歩行型作業機。
【請求項9】
前記駆動源は、電動モータである請求項1から7のいずれか一項に記載の歩行型作業機。
【請求項10】
前記駆動源は、キャブレター式エンジンである請求項1から7のいずれか一項に記載の歩行型作業機。
発明の詳細な説明
【技術分野】
【0001】
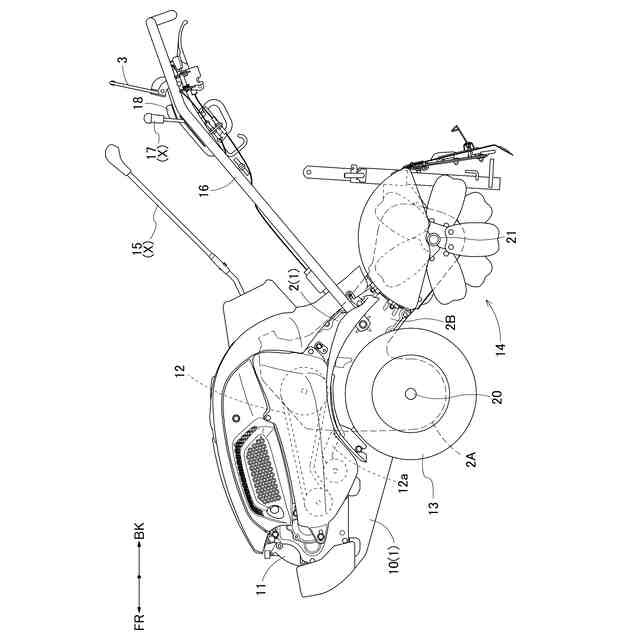
本発明は、例えば、歩行型管理機あるいは歩行型田植機等の歩行型作業機に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
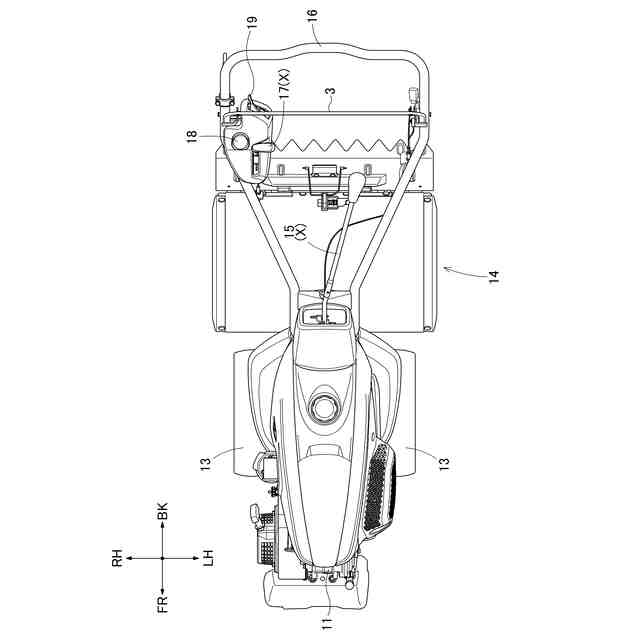
特許文献1には、歩行型管理機が開示されている。歩行型作業機は、駆動源としてエンジンを備え、駆動源により走行装置と機体を走行させながら作業装置によって作業を行う。オペレータは、操縦ハンドルを持って共に歩行しながら機体を操縦する。操縦ハンドルの近くに、作業クラッチを入切操作するための作業クラッチレバー、エンジン回転を調整するスロットルレバー等が設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2019-4843号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場にて歩行型管理機により農作業が行われる際、直進と旋回とが交互に行われる。例えば、直進しながら耕耘作業を行い、圃場の端に到達すると機体を旋回させる場合がある。直進しながら耕耘作業を行うときには、出力を高めるために、エンジンは回転数が高い状態となり、走行の速度も高くなる。一方、旋回の際には走行の速度が低い方が操縦し易い。そのとき、オペレータは、クラッチ操作とスロットルレバーとを共に操作する必要があり、操作が煩雑となる。
【0005】
旋回操作とは別に、例えば、直進しながら畦の近くまで作業したのち、後進して次の作業場所に移動する場合のように、前進走行と後進走行とが交互に行われることもある。このとき、前進ではエンジンは回転数が高い状態となるが、後進の際には、走行の速度が低い方が操縦し易い。この場合にも、オペレータは、前後進の変更操作とスロットルレバーの操作とを共に行う必要があり、操作が煩雑となる。
【0006】
そこで、一つの操作具の操作で作業状態を変更するとともに、駆動源(エンジン)の出力速度を変更させることにより、操作の煩わしさを解消することが考えられる。操作具を操作することにより被操作装置の操作状態を変更することに加えて、駆動源の出力を変更させる構成である。しかし、この場合、操作具の操作により駆動源の出力を増大させる場合、作業性を考慮して急速に出力を増大させると、オペレータによる操作が不安定になるおそれがある。
【0007】
本発明の目的は、操作の簡略化を行うことが可能でありながら、操作上の安定性を確保することが可能な歩行型作業機を提供する点にある。
【課題を解決するための手段】
【0008】
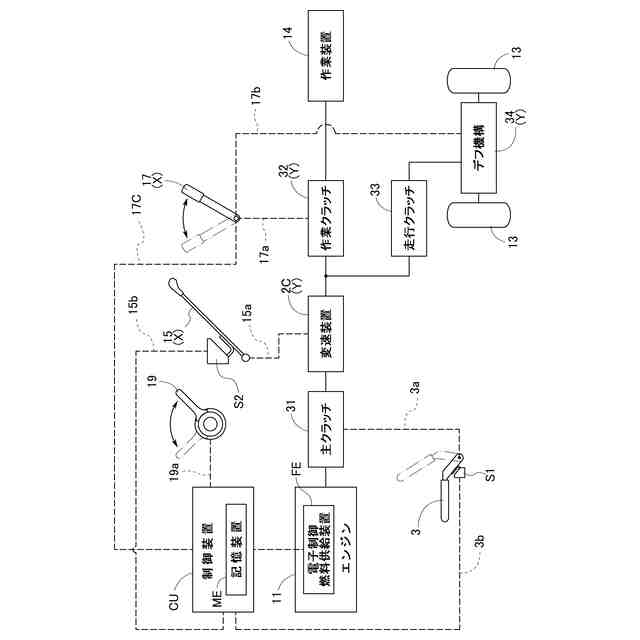
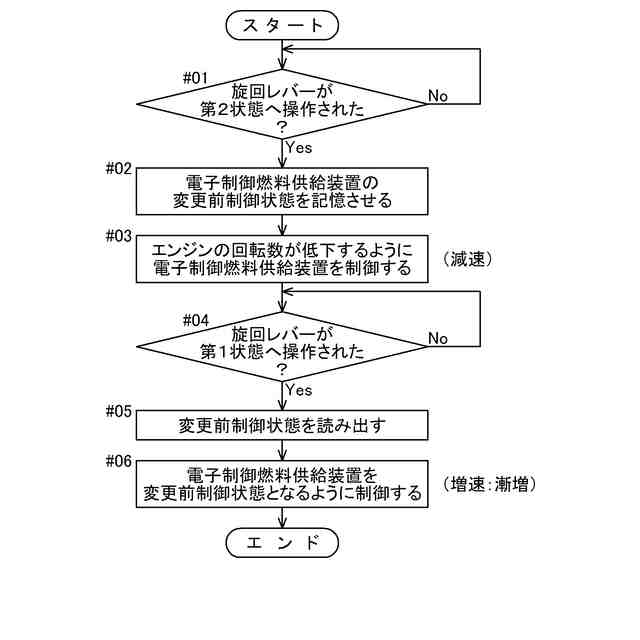
本発明に係る歩行型作業機の特徴構成は、出力回転を変更可能な駆動源と、人為操作により第1操作状態と第2操作状態とに切り換え可能な操作具と、前記操作具の操作により作動状態が切り換わる被操作装置と、前記駆動源の作動を制御する制御装置と、が備えられ、前記制御装置は、前記操作具が前記第1操作状態から前記第2操作状態に切り換わると、前記駆動源の出力回転を設定速度に向けて漸増させる点にある。
【0009】
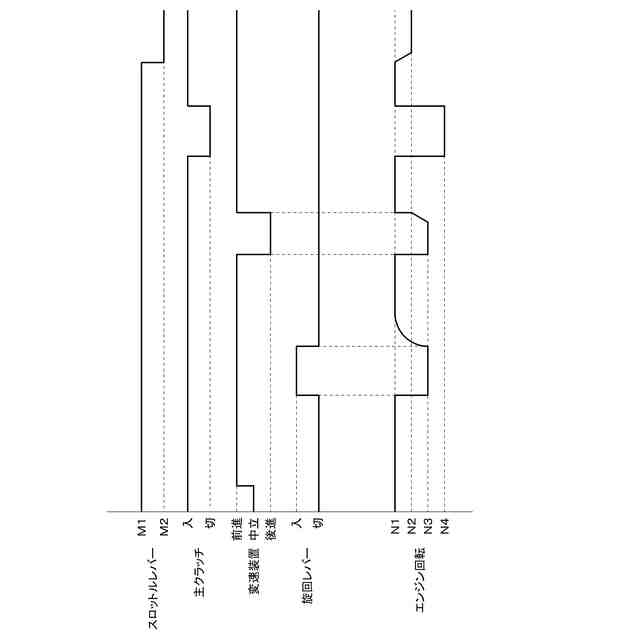
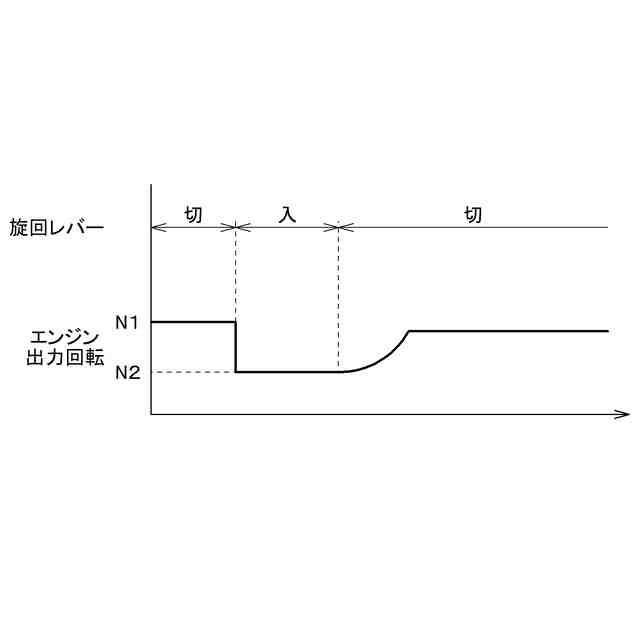
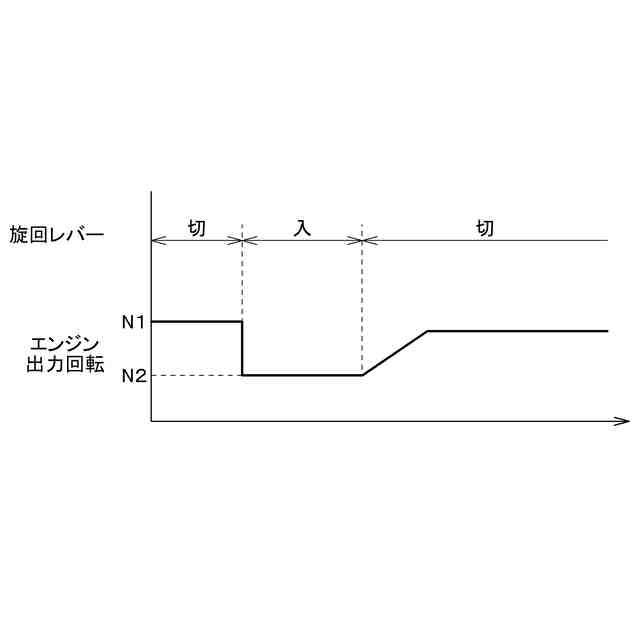
本発明によれば、操作具が第1操作状態と第2操作状態とに切り換えられるのに伴って、被操作装置の作動状態が切り換わるとともに、駆動源の出力回転が増加するので、操作の簡略化が図れる。又、そのとき、出力回転が漸増する。すなわち、徐々に出力回転を増やしていくので、機体を操縦操作しているオペレータによる操作が不安定になるおそれは少ない。
【0010】
従って、操作の簡略化を行うことが可能でありながら、操作上の安定性を確保することが可能な歩行型作業機を提供できるに至った。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
28日前
株式会社クボタ
作業車
28日前
株式会社クボタ
田植機
3日前
株式会社クボタケミックス
管継手
15日前
株式会社クボタケミックス
配管構造
1か月前
株式会社クボタ
作業車両
10日前
株式会社クボタ
作業車両
10日前
株式会社クボタ
水田作業機
20日前
株式会社クボタ
電動作業車
7日前
株式会社クボタ
電動作業車
7日前
株式会社クボタ
電動作業車
7日前
株式会社クボタ
水田作業機
20日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
株式会社クボタ
電動作業車両
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ