TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080675
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193983
出願日
2023-11-14
発明の名称
動作経路生成装置および動作経路生成方法
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250519BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のロボットについて、動作経路を決定する時間を短時間化できる動作経路生成装置を提供する。
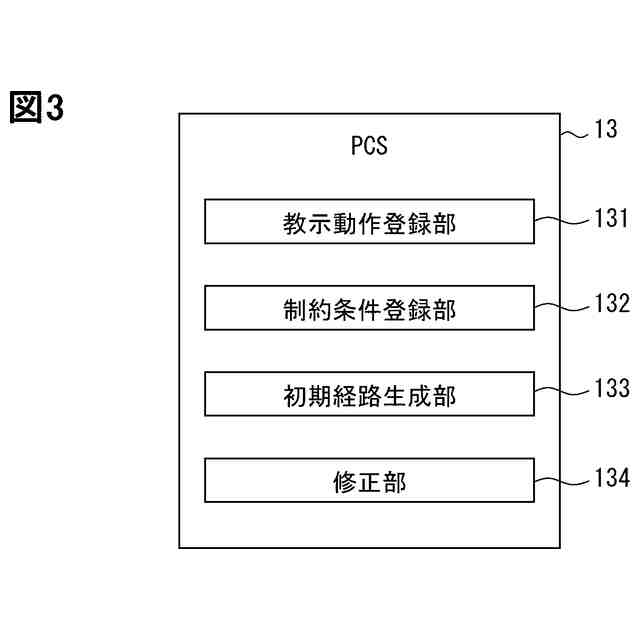
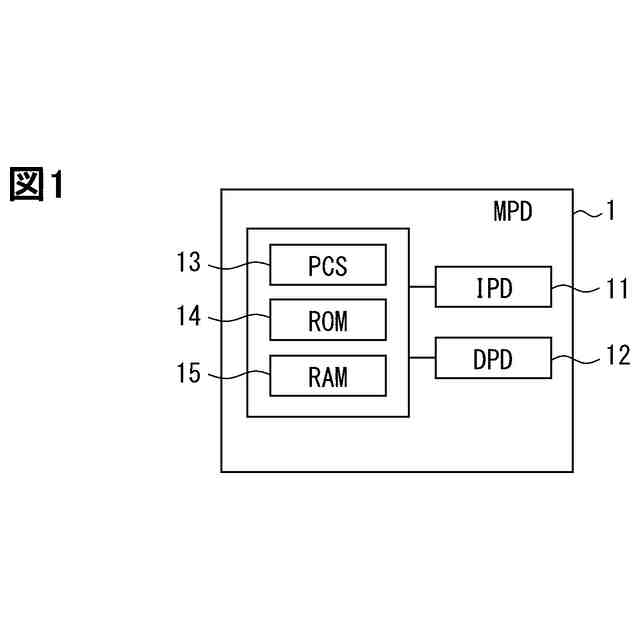
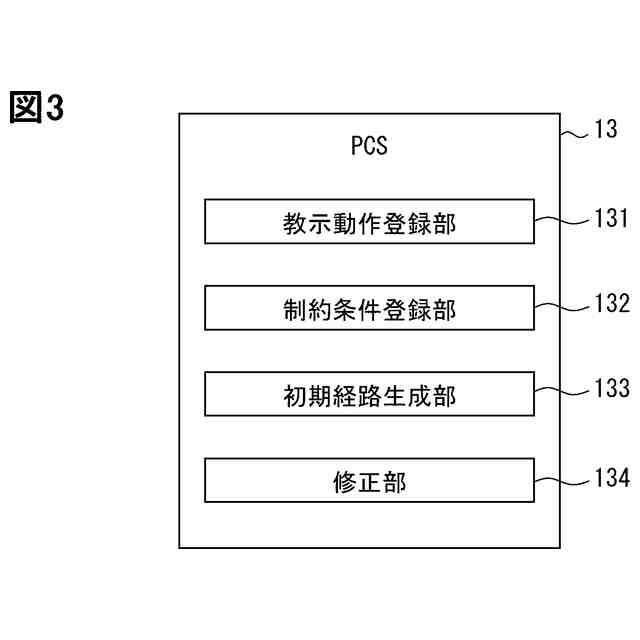
【解決手段】プロセッサ13は、ロボットの教示動作が登録された教示動作登録部131と、ロボットの動作の順序制約を含む制約条件が登録された制約条件登録部132とを備える。動作経路生成装置1は、複数のロボットについて動作経路を生成する初期経路生成部133と、各部の動作開始時間を修正する修正部134とを備える。初期経路生成部133は、教示動作と制約条件とに基づいて各部の動作開始時間を決定し、2つの教示動作の間における複数のロボットに関する干渉回避経路を生成する。修正部134は、生成した動作経路に基づいて、ロボットの動作開始時間を修正する。
【選択図】図3
特許請求の範囲
【請求項1】
複数のロボット(21,22)に係る動作経路を生成する動作経路生成装置(1)であって、
前記ロボットについての教示動作が登録されている教示動作登録部(131)と、
前記ロボットに関して動作の順序制約を少なくとも含む制約条件が登録されている制約条件登録部(132)と、
前記教示動作と前記制約条件とに基づいて前記ロボットの動作開始時間を決定し、2つの前記教示動作の間における複数の前記ロボットに関する干渉回避経路を生成して、複数の前記ロボットについて動作経路を生成する初期経路生成部(133)と、
生成した前記動作経路に基づいて前記ロボットの動作開始時間を修正する修正部(134)と、
を備える動作経路生成装置。
続きを表示(約 770 文字)
【請求項2】
前記制約条件登録部には、前記動作開始時間に関する調整幅である調整可能時間に前記ロボットが移動する距離に基づいて決定された複数の前記ロボット間の安全距離を、確保することが、前記制約条件として登録されている請求項1に記載の動作経路生成装置。
【請求項3】
前記初期経路生成部は、前記動作開始時間に関する調整幅である調整可能時間に基づいて、複数の前記ロボットに関する非干渉経路を生成する請求項1に記載の動作経路生成装置。
【請求項4】
前記修正部は、特定の前記ロボットに係る動作開始時間を固定値として、複数の前記ロボットの動作を再生成する請求項1から請求項3のいずれか一項に記載の動作経路生成装置。
【請求項5】
複数の前記ロボットに関する動作経路の評価値に基づいて動作経路の範囲を探索する経路探索範囲設定部を備え、
前記経路探索範囲設定部は、制御対象である全てのロボットに係る評価値が特定のロボットの評価値以下になるように、複数の前記ロボットの動作経路を探索する請求項1に記載の動作経路生成装置。
【請求項6】
複数のロボット(21,22)に係る動作経路を生成する動作経路生成方法であって、
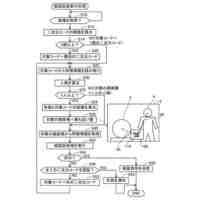
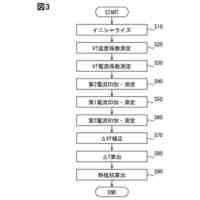
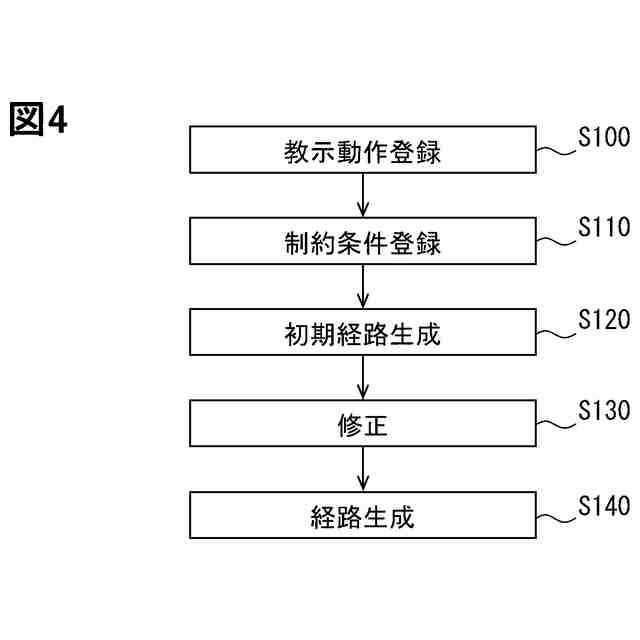
登録されている前記ロボットの教示動作と、前記ロボットに関して動作の順序制約を少なくとも含んで登録されている制約条件とに基づいて、前記ロボットの動作開始時間を決定し、2つの前記教示動作の間における複数の前記ロボットに関する干渉回避経路を生成して、複数の前記ロボットについて動作経路を生成すること(S120)と、
生成した前記動作経路に基づいて前記ロボットの動作開始時間を修正すること(S130)と、
を備える動作経路生成方法。
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、動作経路生成装置および動作経路生成方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、複数のロボットが共通の作業領域内で同時に作業を行う場合に、障害物を避けつつ各ロボット同士が干渉しないように動作を教示する方法を開示している。この方法では、各ロボットの通過領域が交差する場合には、いずれのロボットも通過できない制約条件を追加的に設定する。さらに、その制約条件の下で、各ロボットが動作指令に基づいて障害物を避けつつ移動するための教示値を再度生成する。
【先行技術文献】
【特許文献】
【0003】
特開2018-144223号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、上記制約条件に基づいた障害物を回避する動作経路を生成するため、冗長な動作経路となることで、動作経路を決定する時間が長くなり得る。特許文献1に開示の方法は、短い時間で動作経路を決定することに関して改良の余地がある、
この明細書に開示する目的の一つは、複数のロボットについて、動作経路を決定する時間を短時間化できる動作経路生成装置および動作経路生成方法を提供する。
【課題を解決するための手段】
【0005】
この明細書に開示された複数の態様は、それぞれの目的を達成するために、互いに異なる技術的手段を採用する。また、特許請求の範囲およびこの項に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示す一例であって、技術的範囲を限定するものではない。
【0006】
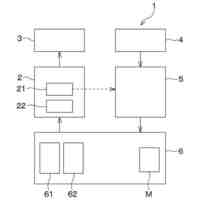
開示する動作経路生成装置の一つは、複数のロボット(21,22)に係る動作経路を生成する動作経路生成装置(1)であって、
ロボットについての教示動作が登録されている教示動作登録部(131)と、
ロボットに関して動作の順序制約を少なくとも含む制約条件が登録されている制約条件登録部(132)と、
教示動作と制約条件とに基づいてロボットの動作開始時間を決定し、2つの教示動作の間における複数のロボットに関する干渉回避経路を生成して、複数のロボットについて動作経路を生成する初期経路生成部(133)と、
生成した動作経路に基づいてロボットの動作開始時間を修正する修正部(134)と、
を備える。
【0007】
開示する動作経路生成方法の一つは、複数のロボット(21,22)に係る動作経路を生成する動作経路生成方法であって、
登録されているロボットの教示動作と、ロボットに関して動作の順序制約を少なくとも含んで登録されている制約条件とに基づいて、ロボットの動作開始時間を決定し、2つの教示動作の間における複数のロボットに関する干渉回避経路を生成して、複数のロボットについて動作経路を生成すること(S120)と、
生成した動作経路に基づいてロボットの動作開始時間を修正すること(S130)と、
を備える。
【0008】
これにより、教示動作と制約条件に基づいて決定したロボットの動作開始時間を、初期生成の動作経路に基づいて修正する。これにより、不要な動作経路の探索を省くことが可能になり、例えば複数のロボットに係る全体の動作時間が改善するべく修正することができる。この装置や方法は、動作経路の初期生成と動作開始時間の最適化とを分けて動作経路を生成できる。このため、各ロボットの待ち時間を低減し、適切な動作経路を生成する時間を低減できることに寄与する。
【図面の簡単な説明】
【0009】
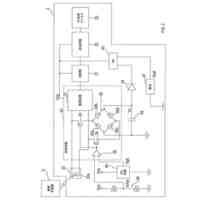
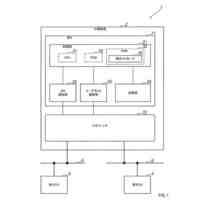
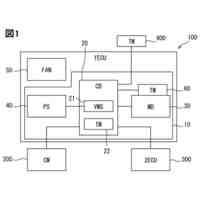
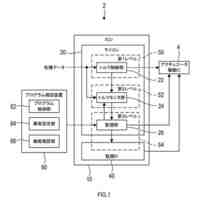
第1実施形態の動作経路生成装置の構成図である。
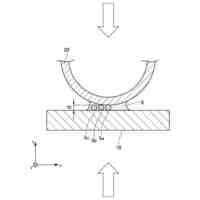
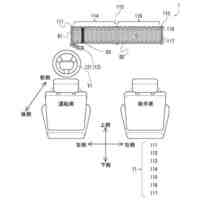
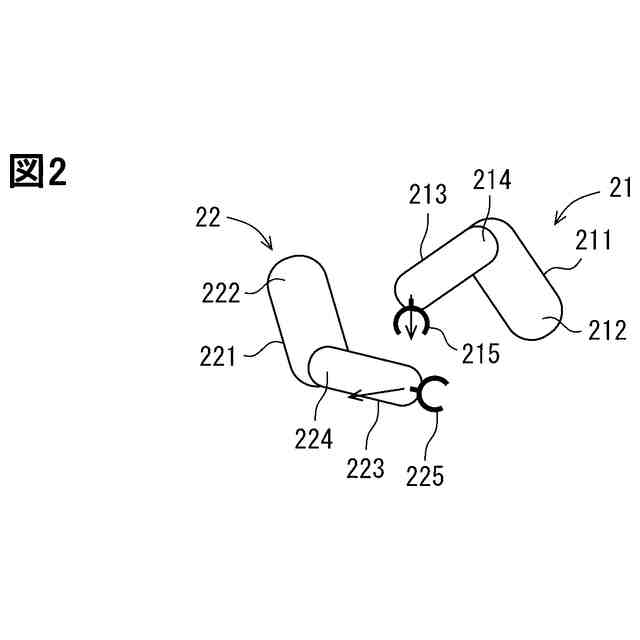
複数のロボットの構成を説明する図である。
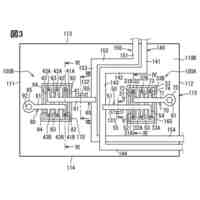
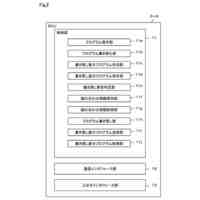
図1のプロセッサが実行する機能を示す構成図である。
第1実施形態の装置が実行する処理を示すフローチャートである。
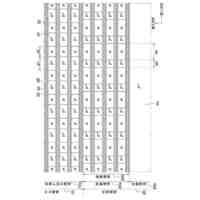
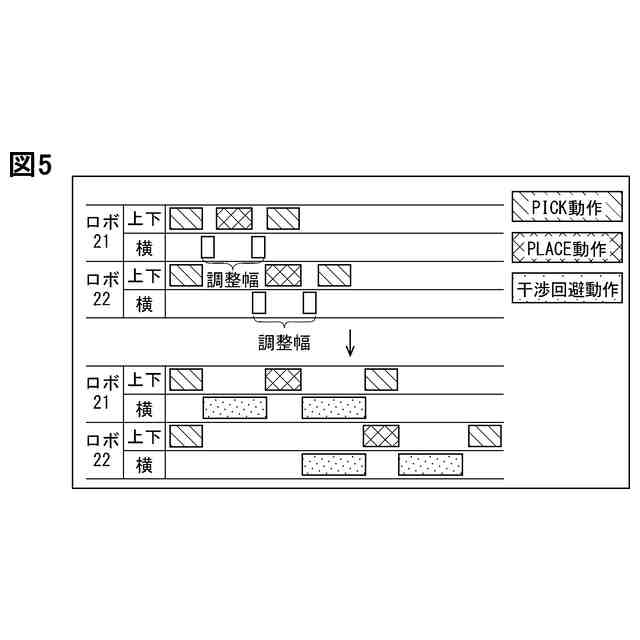
初期経路生成部の処理を説明する図である。
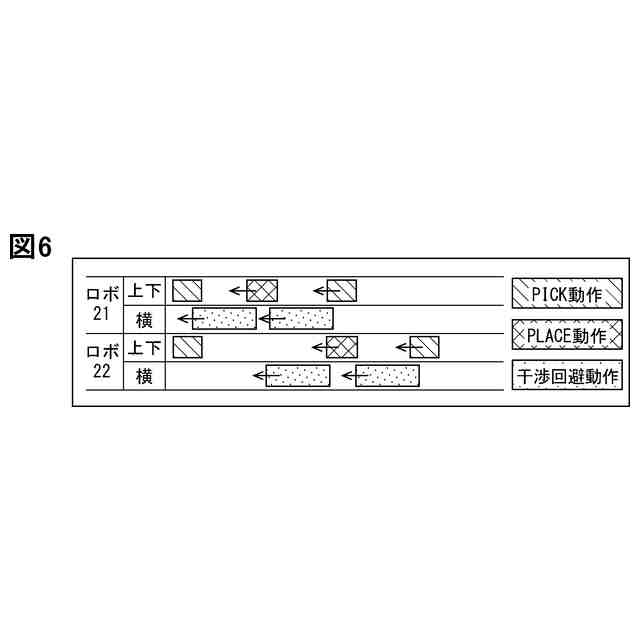
修正部の処理を説明する図である。
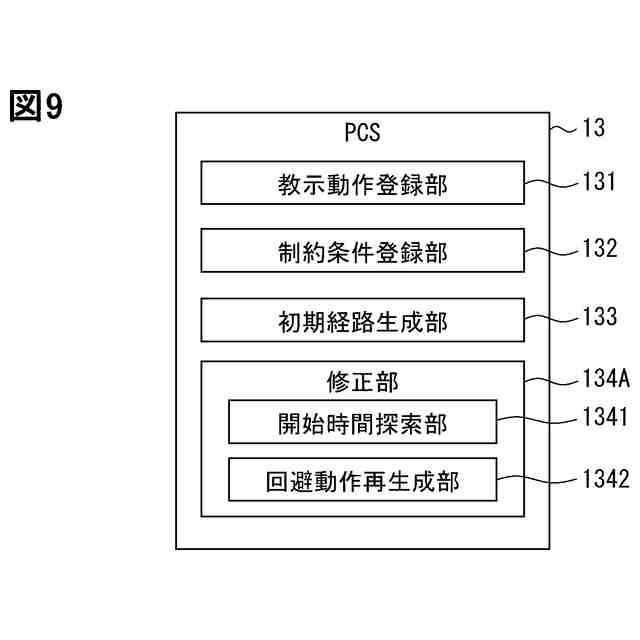
第2実施形態のプロセッサが実行する機能を示す構成図である。
第2実施形態の装置が実行する処理を示すフローチャートである。
第3実施形態のプロセッサが実行する機能を示す構成図である。
第3実施形態の装置が実行する処理を示すフローチャートである。
第4実施形態のプロセッサが実行する機能を示す構成図である。
第4実施形態の装置が実行する処理を示すフローチャートである。
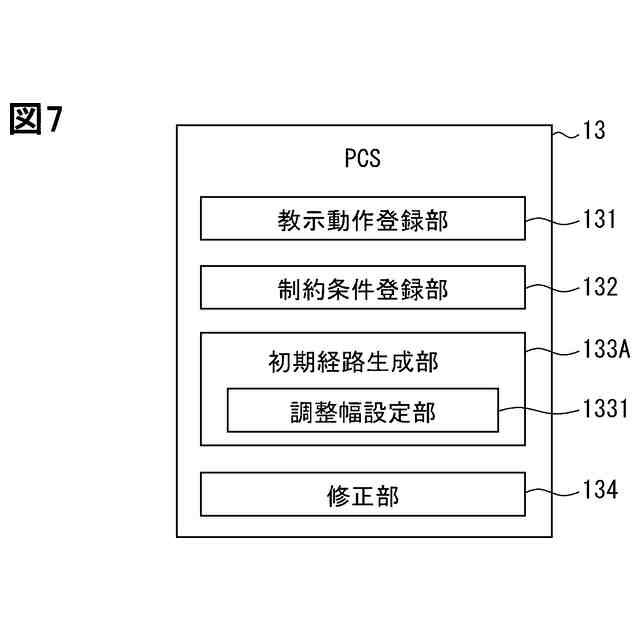
第5実施形態のプロセッサが実行する機能を示す構成図である。
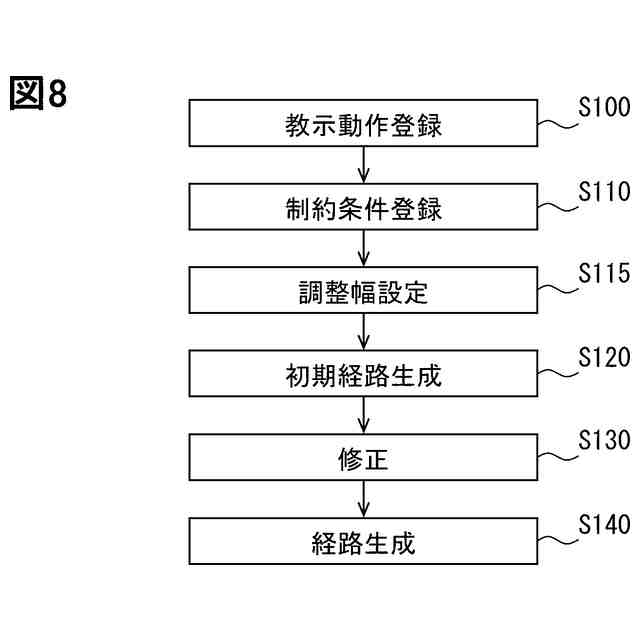
第5実施形態の装置が実行する処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下に、図面を参照しながら本開示を実施するための複数の形態を説明する。各形態において先行する形態で説明した事項に対応する部分には同一の参照符号を付して重複する説明を省略する場合がある。各形態において構成の一部のみを説明している場合は、構成の他の部分については先行して説明した他の形態を適用することができる。各実施形態で具体的に組み合わせが可能であることを明示している部分同士の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても実施形態同士を部分的に組み合せることも可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
携帯機
11日前
株式会社デンソー
熱交換器
13日前
株式会社デンソー
電気機器
20日前
株式会社デンソーテン
表示装置
13日前
株式会社デンソー
熱交換器
3日前
株式会社デンソー
中継装置
14日前
株式会社デンソー
ステータ
13日前
株式会社デンソーウェーブ
携帯端末
11日前
株式会社デンソーテン
表示装置
今日
株式会社デンソー
熱交換器
20日前
株式会社デンソー
回転電機
5日前
株式会社デンソー
位相調整器
17日前
株式会社デンソーウェーブ
顔認証装置
18日前
株式会社デンソー
レーダ装置
20日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
センサ装置
19日前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソーテン
スピーカ装置
25日前
株式会社デンソー
電力変換装置
12日前
株式会社デンソー
電池監視装置
20日前
株式会社デンソー
電子制御装置
25日前
株式会社デンソー
電子制御装置
19日前
株式会社デンソー
電子制御装置
18日前
株式会社デンソー
電力変換装置
12日前
株式会社デンソーウェーブ
三次元計測装置
18日前
株式会社デンソー
電気音響変換器
20日前
株式会社デンソー
ガス燃料噴射弁
11日前
株式会社デンソー
熱抵抗測定方法
7日前
株式会社デンソーウェーブ
三次元計測装置
13日前
株式会社デンソー
機器モジュール
4日前
株式会社デンソーウェーブ
レーザレーダ装置
7日前
株式会社デンソー
スイッチング素子
1か月前
株式会社デンソー
半導体パッケージ
14日前
株式会社デンソー
プログラム確認装置
14日前
株式会社デンソー
データ保存システム
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ