TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080531
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193736
出願日
2023-11-14
発明の名称
溶接装置
出願人
株式会社IHI
代理人
弁理士法人青海国際特許事務所
主分類
B23K
9/12 20060101AFI20250519BHJP(工作機械;他に分類されない金属加工)
要約
【課題】意図した領域外への熱源の移動を抑制することができる溶接装置を提供すること。
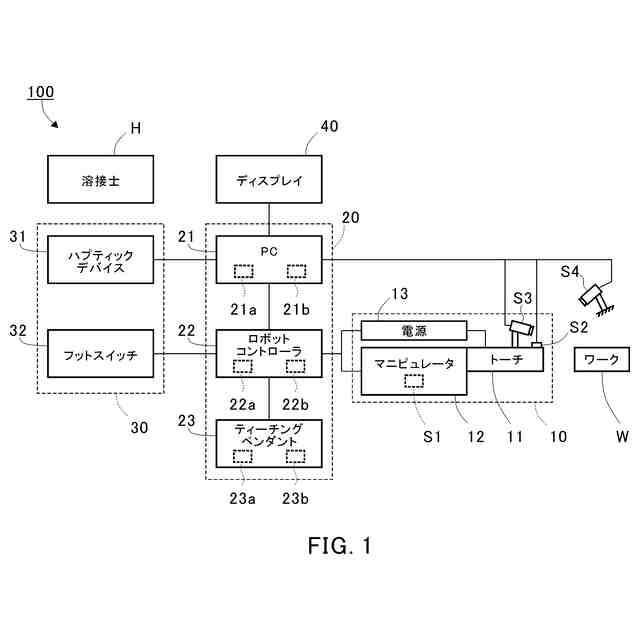
【解決手段】溶接装置100は、溶接用の熱源11と、熱源11を保持し、熱源11を移動させる多軸ロボット12と、熱源11がワークWに対して設定された所定の許可領域のリミットに達したことを検出するセンサS1,S2,S3と、多軸ロボット12を動作させるための入力を作業者Hから受け付ける入力装置30と、多軸ロボット12の制御装置20であって、当該制御装置20は、入力装置30への作業者Hからの入力に基づく多軸ロボット12の動作中に、熱源11がリミットに達したことがセンサS1,S2,S3によって検出された場合に、リミットを超える方向への熱源11の移動に対して制限を付与すること、を実行するように構成される、制御装置20と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
溶接用の熱源と、
前記熱源を保持し、前記熱源を移動させる多軸ロボットと、
前記熱源がワークに対して設定された所定の許可領域のリミットに達したことを検出するセンサと、
前記多軸ロボットを動作させるための入力を作業者から受け付ける入力装置と、
前記多軸ロボットの制御装置であって、
当該制御装置は、
前記入力装置への前記作業者からの前記入力に基づく前記多軸ロボットの動作中に、前記熱源が前記リミットに達したことが前記センサによって検出された場合に、前記リミットを超える方向への前記熱源の移動に対して制限を付与すること、
を実行するように構成される、制御装置と、
を備える、溶接装置。
続きを表示(約 960 文字)
【請求項2】
前記制御装置は、前記センサからのデータに基づいて、前記許可領域を設定する、請求項1に記載の溶接装置。
【請求項3】
前記制御装置は、前記多軸ロボットに対して、前記制限として、前記リミットを超える方向への前記熱源の移動速度を低減するよう指令を送る、請求項1または2に記載の溶接装置。
【請求項4】
前記制御装置は、前記多軸ロボットに対して、前記制限として、前記リミットを超える方向への前記熱源の移動に対して抵抗力を付与するよう指令を送る、請求項3に記載の溶接装置。
【請求項5】
前記制御装置は、前記多軸ロボットに対して、前記制限として、前記リミットを超える方向への前記熱源の移動速度に対して倍率をかけるよう指令を送る、請求項3に記載の溶接装置。
【請求項6】
前記制御装置は、前記多軸ロボットに対して、前記制限として、前記リミットを超える方向への前記熱源の移動を禁止するよう指令を送る、請求項1または2に記載の溶接装置。
【請求項7】
前記入力装置は、前記制限を解除するための入力を前記作業者から受け付け、
前記制御装置は、前記制限を解除するための前記入力を前記入力装置が受け付けた場合に、前記制限を解除する、請求項1または2に記載の溶接装置。
【請求項8】
前記入力装置は、前記制限を解除するための入力を前記作業者から受け付け、
前記制御装置は、前記制限を解除するための前記入力を前記入力装置が受け付けた場合に、前記制限を解除する、請求項3に記載の溶接装置。
【請求項9】
前記入力装置は、前記制限を解除するための入力を前記作業者から受け付け、
前記制御装置は、前記制限を解除するための前記入力を前記入力装置が受け付けた場合に、前記制限を解除する、請求項4に記載の溶接装置。
【請求項10】
前記入力装置は、前記制限を解除するための入力を前記作業者から受け付け、
前記制御装置は、前記制限を解除するための前記入力を前記入力装置が受け付けた場合に、前記制限を解除する、請求項5に記載の溶接装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、溶接装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
遠隔溶接では、人の手に代えて、ロボットが溶接トーチ等の熱源を移動させる。遠隔溶接では、溶接士がロボットを操作する。遠隔溶接では、ワークに対する熱源の位置を正確に把握することは、溶接士にとってしばしば困難である。例えば、特許文献1は、カメラを備える溶接装置を開示する。特許文献1では、カメラによって異なる方向から撮影された複数の画像が処理され、ワークに対する溶接トーチの位置がディスプレイに表示される。作業者は、ディスプレイに表示された画像を確認しながら、遠隔操作を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2022-131113号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔溶接では、溶接士は、熱源を複雑な経路に沿って移動させることをしばしば要求される。例えば、溶接士が溶接装置を誤って移動させた場合、または、意図しない操作が入力インタフェースに入力された場合、熱源がワークに衝突する、または、溶接の品質が低下する等の問題が有り得る。
【0005】
本開示は、意図した領域外への熱源の移動を抑制することができる、溶接装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る溶接装置は、溶接用の熱源と、熱源を保持し、熱源を移動させる多軸ロボットと、熱源がワークに対して設定された所定の許可領域のリミットに達したことを検出するセンサと、多軸ロボットを動作させるための入力を作業者から受け付ける入力装置と、多軸ロボットの制御装置であって、当該制御装置は、入力装置への作業者からの入力に基づく多軸ロボットの動作中に、熱源がリミットに達したことがセンサによって検出された場合に、リミットを超える方向への熱源の移動に対して制限を付与すること、を実行するように構成される、制御装置と、を備える。
【0007】
制御装置は、センサからのデータに基づいて、許可領域を設定してもよい。
【0008】
制御装置は、多軸ロボットに対して、制限として、リミットを超える方向への熱源の移動速度を低減するよう指令を送ってもよい。
【0009】
制御装置は、多軸ロボットに対して、制限として、リミットを超える方向への熱源の移動に対して抵抗力を付与するよう指令を送ってもよい。
【0010】
制御装置は、多軸ロボットに対して、制限として、リミットを超える方向への熱源の移動速度に対して倍率をかけるよう指令を送ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ