TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078405
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023190951
出願日
2023-11-08
発明の名称
測定装置、測定方法、及び測定プログラム
出願人
日本電信電話株式会社
,
ARAV株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G06T
7/60 20170101AFI20250513BHJP(計算;計数)
要約
【課題】リアルタイムに、機械の周辺物体との距離を測定する。
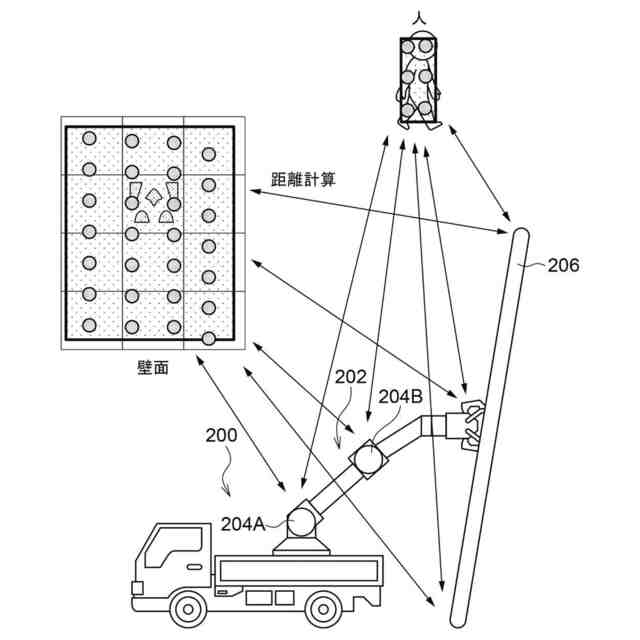
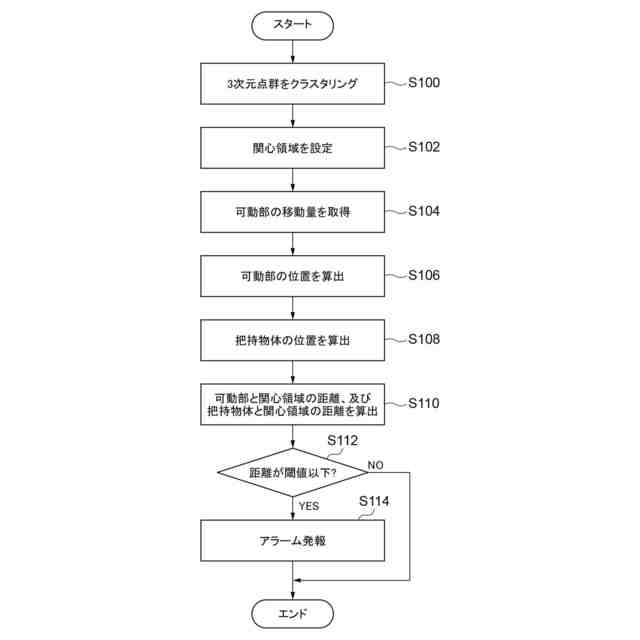
【解決手段】測定装置は、物体を把持することが可能な可動部を有する機械の周辺の物体を表す3次元点群から、クラスタリングを用いて、関心領域を設定する領域設定部と、前記可動部の移動量を取得する移動量取得部と、前記可動部の長さ、前記移動量、及び前記可動部により把持される把持物体の長さに基づいて、前記把持物体の位置を算出する位置算出部と、前記把持物体の位置と、前記関心領域とに基づいて、前記把持物体と、前記関心領域内に含まれる点群との距離を測定する測定部と、を含む。
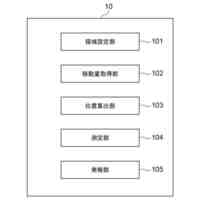
【選択図】図2
特許請求の範囲
【請求項1】
物体を把持することが可能な可動部を有する機械の周辺の物体を表す3次元点群から、クラスタリングを用いて、関心領域を設定する領域設定部と、
前記可動部の移動量を取得する移動量取得部と、
前記可動部の長さ、前記移動量、及び前記可動部により把持される把持物体の長さに基づいて、前記把持物体の位置を算出する位置算出部と、
前記把持物体の位置と、前記関心領域とに基づいて、前記把持物体と、前記関心領域内に含まれる点群との距離を測定する測定部と、
を含む測定装置。
続きを表示(約 820 文字)
【請求項2】
前記位置算出部は、更に、前記可動部の長さ及び前記移動量に基づいて、前記可動部の位置を算出し、
前記測定部は、更に、前記可動部の位置と、前記関心領域とに基づいて、前記可動部と、前記関心領域内に含まれる点群との距離を測定する請求項1記載の測定装置。
【請求項3】
前記領域設定部は、前記機械の周辺又は前記機械上に設定された点群測定センサによって測定された3次元点群から、前記関心領域を設定する請求項1記載の測定装置。
【請求項4】
前記可動部は、関節部を有し、
前記移動量取得部は、前記関節部に設けられた移動量測定センサによって測定された移動量を取得する請求項1記載の測定装置。
【請求項5】
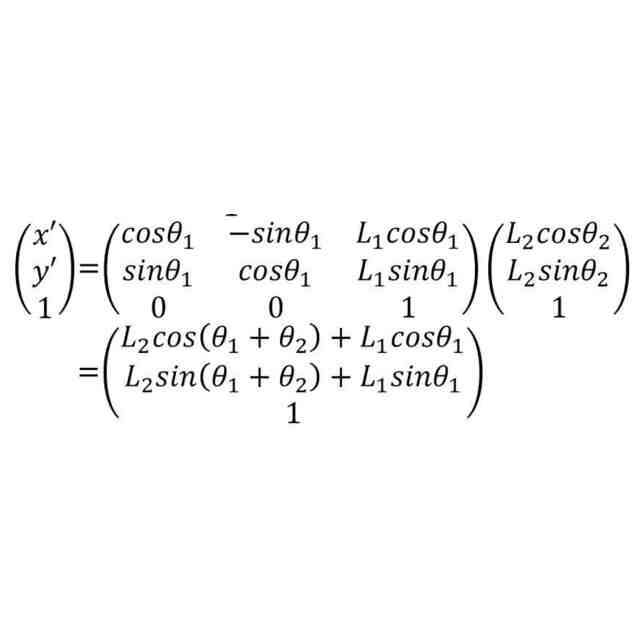
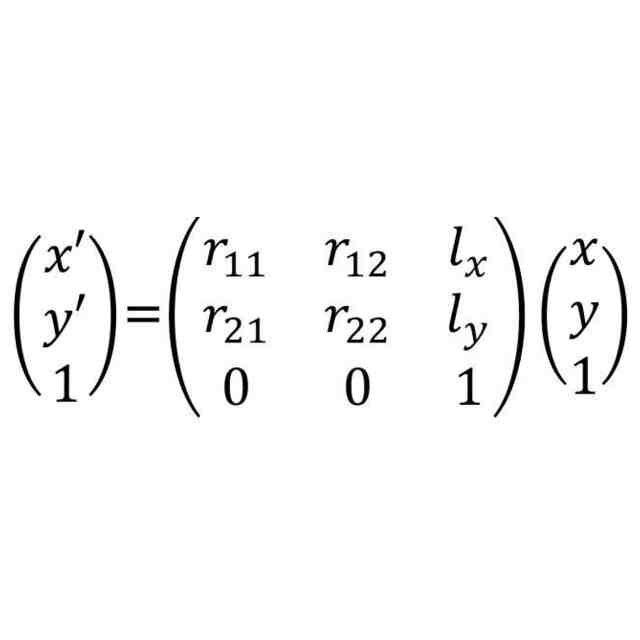
前記位置算出部は、前記可動部の長さ、前記移動量、前記可動部により把持される把持物体の長さに基づいて、順運動学の理論に従って予め定められた計算式に従って、前記把持物体の位置を算出する請求項1記載の測定装置。
【請求項6】
前記測定された前記距離が、閾値以下である場合に、アラームを発報する発報部を更に含む請求項1記載の測定装置。
【請求項7】
物体を把持することが可能な可動部を有する機械の周辺の物体を表す3次元点群から、クラスタリングを用いて、関心領域を設定し、
前記可動部の移動量を取得し、
前記可動部の長さ、前記移動量、及び前記可動部により把持される把持物体の長さに基づいて、前記把持物体の位置を算出し、
前記把持物体の位置と、前記関心領域とに基づいて、前記把持物体と、前記関心領域内に含まれる点群との距離を測定する
処理をコンピュータが実行する測定方法。
【請求項8】
コンピュータを、請求項1~請求項6の何れか1項に記載の測定装置の各部として機能させるための測定プログラム。
発明の詳細な説明
【技術分野】
【0001】
開示の技術は、測定装置、測定方法、及び測定プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
屋外構造物を車載した3次元レーザスキャナ(Mobile Mapping System:MMS)により、屋外構造物を3次元モデル化する技術が知られている(例えば、特許文献1)。当該技術は、走査線ごとにクラスタ化した後、クラスタ形状から計測物体の形状を推測し、3次元地図や写真画素内の位置情報を基に、写真上に、抽出した設備を重畳している。
【先行技術文献】
【特許文献】
【0003】
特開2018-195240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
工事施工中に対象物の挙動を監視し、対象物同士の近接又は接触を検知し、作業者に知らせるシステムが考えられる。しかし、上記特許文献1に記載の技術では、3次元モデル作製や写真重畳に時間を要する。更に、3次元地図を作成後、写真に重畳しているため、現場でリアルタイムに物体検知し、位置情報の算出及び物体間距離の算出をすることは難しい。このように、従来技術では、リアルタイム性がない、という課題、及び後処理工程を経て3次元地図を作成した後でないと写真に重畳できないという課題がある。
【0005】
開示の技術は、上記の点に鑑みてなされたものであり、リアルタイムに、機械の周辺物体との距離を測定することができる測定装置、測定方法、及び測定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
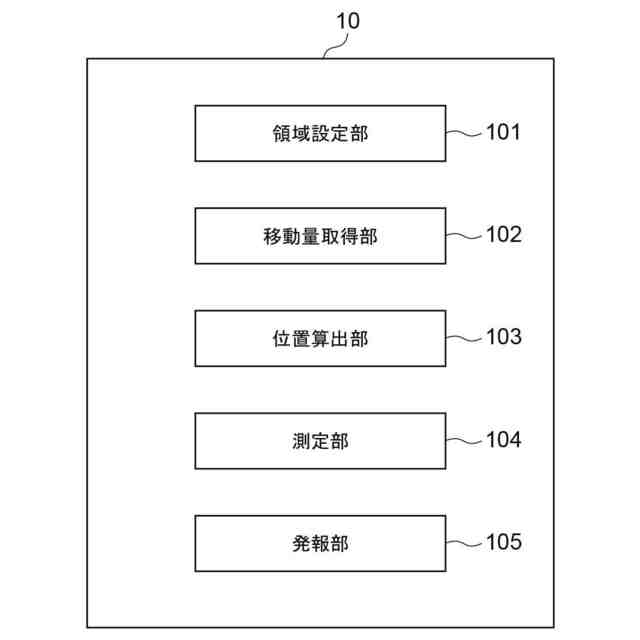
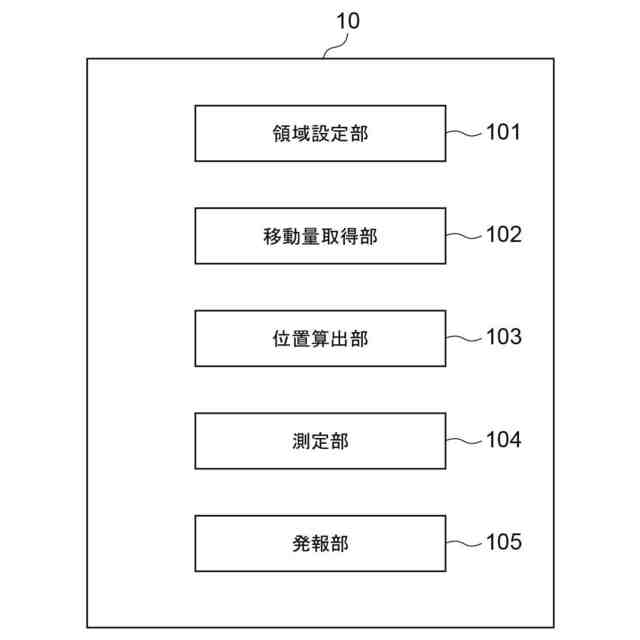
本開示の第1態様は、測定装置であって、物体を把持することが可能な可動部を有する機械の周辺の物体を表す3次元点群から、クラスタリングを用いて、関心領域を設定する領域設定部と、前記可動部の移動量を取得する移動量取得部と、前記可動部の長さ、前記移動量、及び前記可動部により把持される把持物体の長さに基づいて、前記把持物体の位置を算出する位置算出部と、前記把持物体の位置と、前記関心領域とに基づいて、前記把持物体と、前記関心領域内に含まれる点群との距離を測定する測定部と、を含む。
【0007】
本開示の第2態様は、測定方法であって、コンピュータが、物体を把持することが可能な可動部を有する機械の周辺の物体を表す3次元点群から、クラスタリングを用いて、関心領域を設定し、前記可動部の移動量を取得し、前記可動部の長さ、前記移動量、及び前記可動部により把持される把持物体の長さに基づいて、前記把持物体の位置を算出し、前記把持物体の位置と、前記関心領域とに基づいて、前記把持物体と、前記関心領域内に含まれる点群との距離を測定する処理を行う。
【0008】
本開示の第3態様は、測定プログラムであって、コンピュータを、上記第1態様の測定装置として機能させるためのプログラムである。
【発明の効果】
【0009】
開示の技術によれば、リアルタイムに、機械の周辺物体との距離を測定することができる。
【図面の簡単な説明】
【0010】
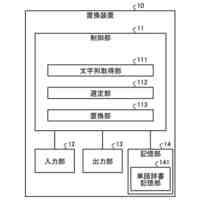
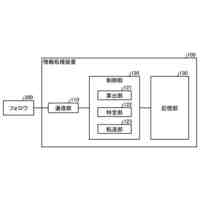
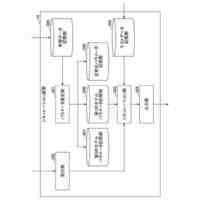
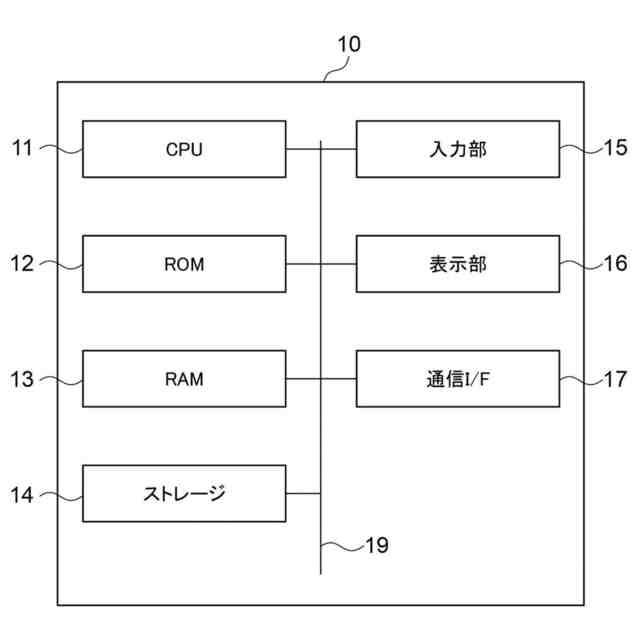
本実施形態の測定装置として機能するコンピュータの一例の概略ブロック図である。
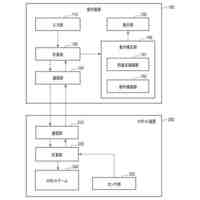
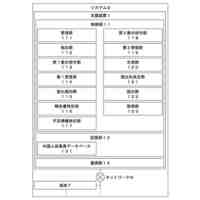
本実施形態の測定装置の構成を示すブロック図である。
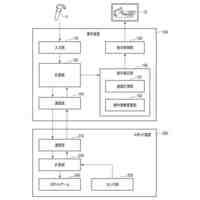
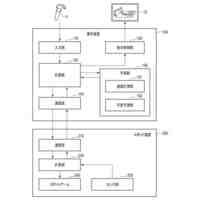
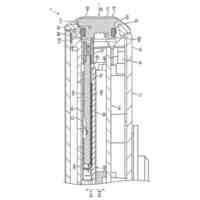
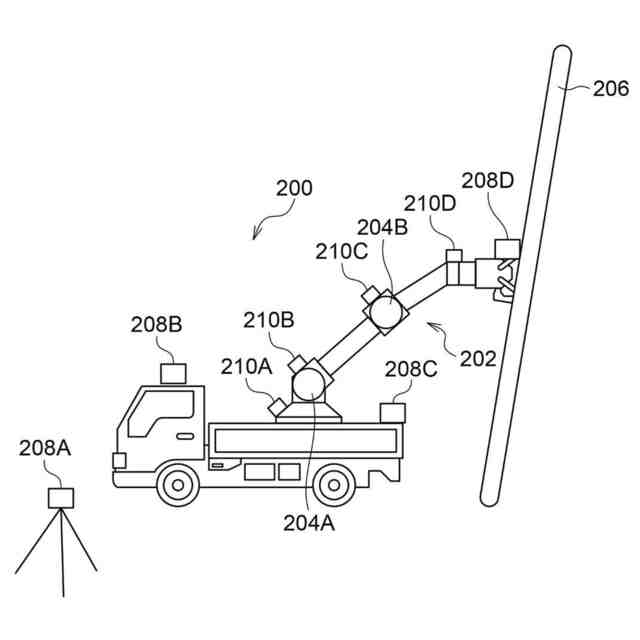
機械及びセンサの一例を示す図である。
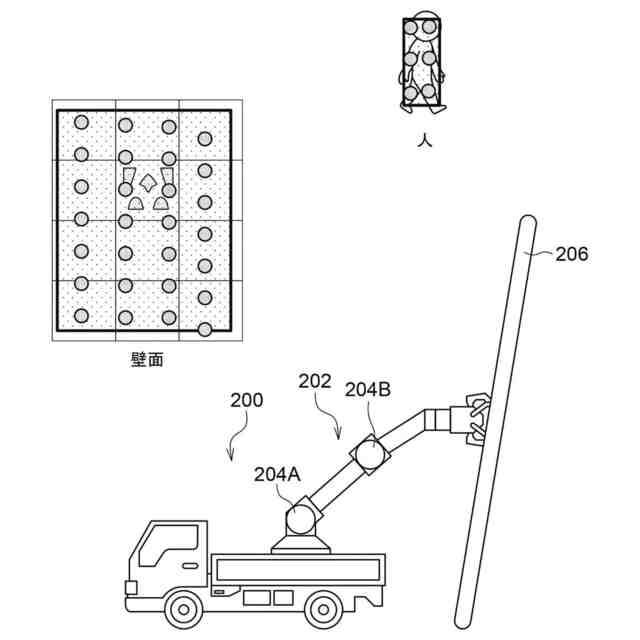
関心領域を設定する方法を説明するための図である。
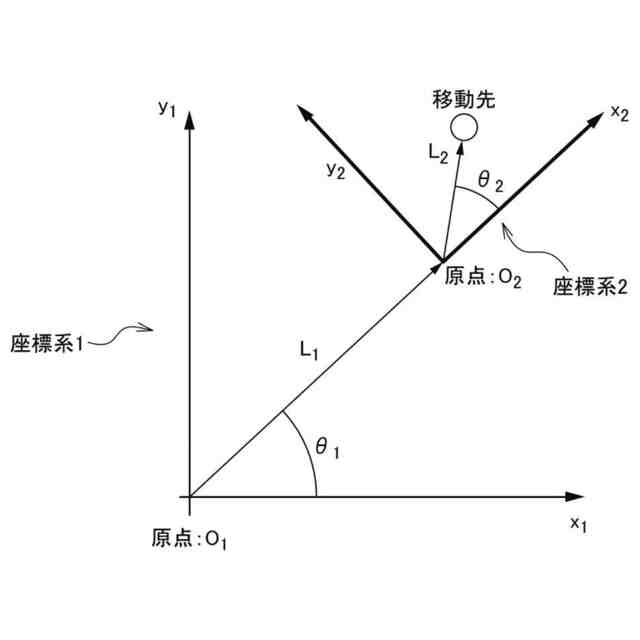
アームの位置を算出する方法を説明するための図である。
周辺物体との距離を測定する方法を説明するための図である。
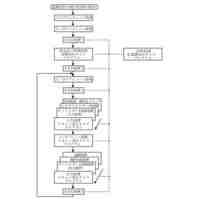
本実施形態の測定装置の測定処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西日本電信電話株式会社
分析システム
7日前
トヨタ自動車株式会社
情報処理装置
今日
日本電信電話株式会社
測定装置、測定方法、及び測定プログラム
2日前
日本電信電話株式会社
置換装置、置換方法および置換プログラム
9日前
日本電信電話株式会社
処理装置、処理方法、及び、処理プログラム
2日前
日本電信電話株式会社
処理装置、処理方法、及び、処理プログラム
2日前
日本電信電話株式会社
情報処理装置、調整方法および調整プログラム
14日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
7日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
8日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
8日前
日本電信電話株式会社
算出装置、算出システム、算出方法、及びプログラム
7日前
東日本電信電話株式会社
情報処理装置、情報処理方法、及び、情報処理プログラム
9日前
日本電信電話株式会社
翻訳装置、翻訳学習装置、翻訳方法、翻訳学習方法及びプログラム
9日前
日本電信電話株式会社
音声合成学習装置、音声合成装置、音声合成学習方法、音声合成方法及びプログラム
9日前
日本電信電話株式会社
学習装置、シミュレーション装置、学習方法、シミュレーション方法、及びプログラム
3日前
トヨタ自動車株式会社
情報処理装置、情報処理装置の動作方法、及び情報処理装置のプログラム
今日
個人
物品給付年金
7日前
個人
政治のAI化
2日前
個人
非正規コート
1か月前
個人
人物再現システム
1か月前
個人
RFタグ読取装置
20日前
個人
在宅介護システム
20日前
個人
AI飲食最適化プラグイン
28日前
キヤノン株式会社
通信装置
8日前
個人
電話管理システム及び管理方法
29日前
有限会社ノア
データ読取装置
1か月前
個人
全アルゴリズム対応型プログラム
3日前
株式会社ザメディア
出席管理システム
1か月前
キヤノン株式会社
画像処理装置
今日
個人
広告提供システムおよびその方法
1か月前
株式会社CROSLAN
支援装置
20日前
大同特殊鋼株式会社
輝線検出方法
2日前
シャープ株式会社
電子機器
2日前
個人
日誌作成支援システム
1か月前
長屋印刷株式会社
画像形成システム
20日前
トヨタ自動車株式会社
欠け検査装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ