TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074609
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185544
出願日
2023-10-30
発明の名称
遠隔操作装置、遠隔操作方法、およびプログラム
出願人
日本電信電話株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B25J
3/00 20060101AFI20250507BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの遠隔からの操作性を改善すること。
【解決手段】この発明の一態様に係わる遠隔操作装置は、操作体の動きをネットワークを介してロボットアームの操作に反映する。遠隔操作装置は、入力部、計算部、予測部、および通信部を具備する。入力部は、操作体の空間位置情報を取得する。計算部は、空間位置情報に基づいて操作体の移動速度を算出する。予測部は、移動速度に応じて可変設定される予測期間だけ未来における操作体の空間位置を予測する。通信部は、予測された空間位置を、ロボットアームを制御する装置にネットワークを介して送信する通信部とを具備する。
【選択図】図2
特許請求の範囲
【請求項1】
操作体の動きをネットワークを介してロボットアームの操作に反映する遠隔操作装置において、
前記操作体の空間位置情報を取得する入力部と、
前記空間位置情報に基づいて前記操作体の移動速度を算出する計算部と、
前記移動速度に応じて可変設定される予測期間だけ未来における前記操作体の空間位置を予測する予測部と、
前記予測された空間位置を、前記ロボットアームを制御する装置に前記ネットワークを介して送信する通信部とを具備する、遠隔操作装置。
続きを表示(約 810 文字)
【請求項2】
前記予測部は、前記移動速度が速い場合の前記予測期間を、前記移動速度が遅い場合の前記予測期間よりも長く設定する、請求項1に記載の遠隔操作装置。
【請求項3】
前記予測部は、
前記操作体の動きが前記ロボットアームの操作に反映されるまでの遅延時間を計測する遅延計測部と、
前記遅延時間と前記空間位置情報とに基づいて前記予測期間を適応的に設定し、当該予測期間に応じた前記空間位置を予測する可変予測部とを備える、請求項1に記載の遠隔操作装置。
【請求項4】
前記通信部は、前記ロボットアームを含むエリアを撮像するカメラから画像データを受信し、
受信した前記画像データを映像化して操作画面を生成し、前記操作画面を表示装置に表示する表示制御部をさらに具備する、請求項1に記載の遠隔操作装置。
【請求項5】
前記表示制御部は、前記予測された空間位置を前記操作画面に重畳表示する、請求項4に記載の遠隔操作装置。
【請求項6】
ネットワークを介してロボットアームを操作するコンピュータが実行する遠隔操作方法であって、
操作体の動きをネットワークを介してロボットアームの操作に反映するコンピュータが実行する遠隔操作方法であって、
前記操作体の空間位置情報を取得する過程と、
前記空間位置情報に基づいて前記操作体の移動速度を算出する過程と、
前記移動速度に応じて可変設定される予測期間だけ未来における前記操作体の空間位置を予測する過程と、
前記予測された空間位置を、前記ロボットアームを制御する装置に前記ネットワークを介して送信する過程とを具備する、遠隔操作方法。
【請求項7】
コンピュータを、請求項1乃至請求項5のいずれかに記載の遠隔操作装置として機能させる命令を含む、プログラム。
発明の詳細な説明
【技術分野】
【0001】
この発明の一態様は、ロボットアームを遠隔で操作することを支援する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ロボットアーム、あるいはマニピュレータは、高度医療やFA(Factory Automation)など、多くの分野で利用されるようになってきている。近年では5Gなどの通信技術と組み合わせ、遠隔からロボットアームを操作するシステムが開発されようとしている。直観的な操作インタフェースによりロボットアームの遠隔操作を支援することも試みられている。
【0003】
オペレータ(操作者)は、手に持った操作体を動かしたりボタンを押すなどして、ロボットアームを遠隔操縦する。一般に、オペレータの操作が遠隔のロボットアームの動きに反映されるまでにはある程度の遅延が生じる。その原因は通信遅延や駆動処理での遅延など様々であり、いずれも操作性の低下をもたらすことから、解決するための技術が模索されている。例えば、人型ロボットを遠隔操作する際に、操作信号を予測する技術が開示されている(非特許文献1を参照)。
【先行技術文献】
【非特許文献】
【0004】
“Prescient whole-body teleoperation of humanoid robots”Luigi Penco, Jean-Baptiste Mouret, Serena Ivaldi, Prescient teleoperation of humanoid robots, 2022
【発明の概要】
【発明が解決しようとする課題】
【0005】
遠隔操縦での作業に際して、様々な要因で生じる遅延により操作性が損なわれる。これにより操作者が違和感を感じたり、疲労感を感じるといった解決すべき課題がある。
この発明は上記事情に着目してなされたもので、ロボットアームの遠隔からの操作性を改善することを可能にする技術を提供しようとするものである。
【課題を解決するための手段】
【0006】
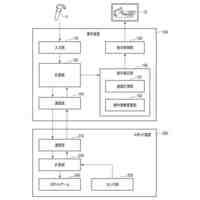
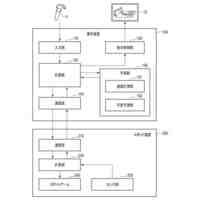
この発明の一態様に係わる遠隔操作装置は、操作体の動きをネットワークを介してロボットアームの操作に反映する。遠隔操作装置は、入力部、計算部、予測部、および通信部を具備する。入力部は、操作体の空間位置情報を取得する。計算部は、空間位置情報に基づいて操作体の移動速度を算出する。予測部は、移動速度に応じて可変設定される予測期間だけ未来における操作体の空間位置を予測する。通信部は、予測された空間位置を、ロボットアームを制御する装置にネットワークを介して送信する通信部とを具備する。
【発明の効果】
【0007】
この発明の一態様によれば、ロボットアームの遠隔からの操作性を改善することを可能にする技術を提供することができる。
【図面の簡単な説明】
【0008】
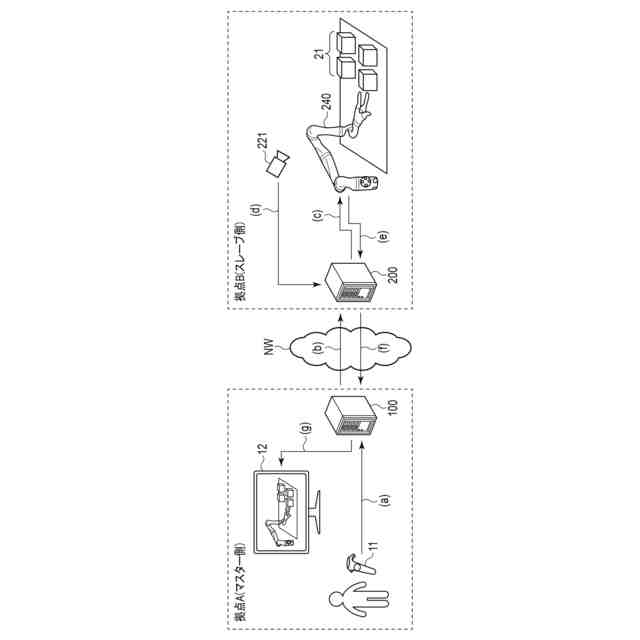
図1は、実施形態に係る遠隔作業システムの一例を示す図である。
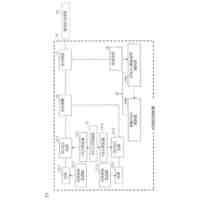
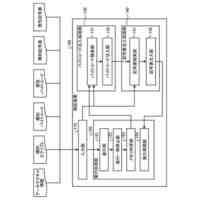
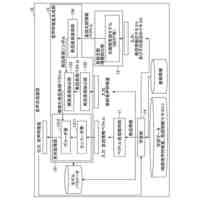
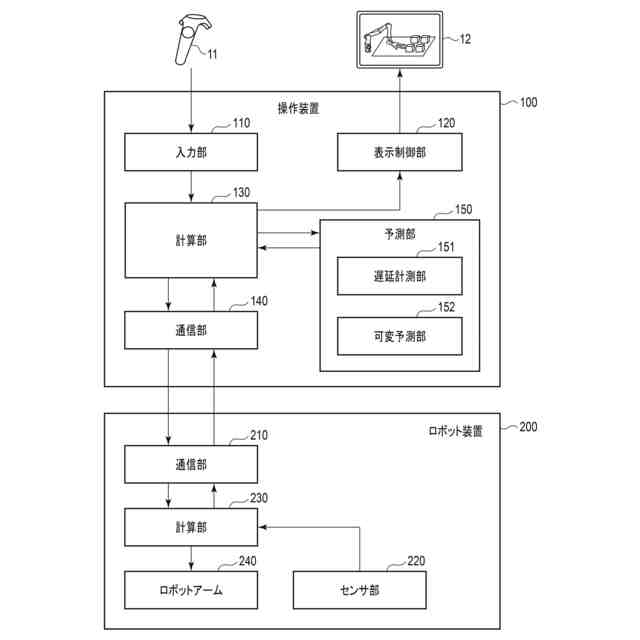
図2は、図1に示される遠隔作業システムの一例を示すブロック図である。
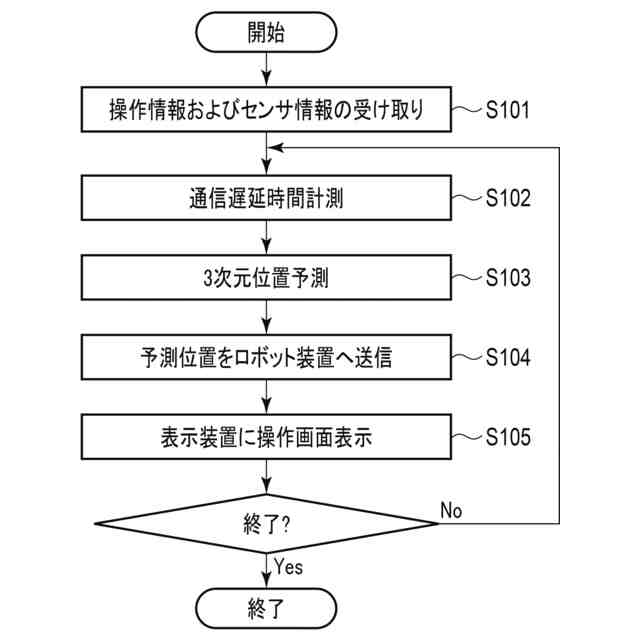
図3は、操作装置100における処理手順の一例を示すフローチャートである。
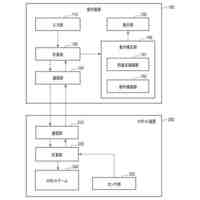
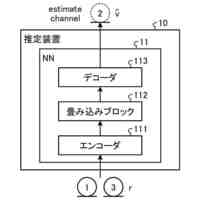
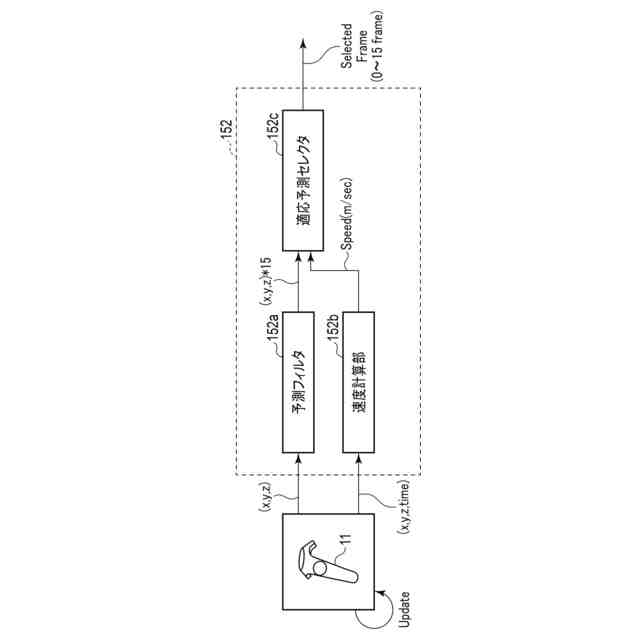
図4は、可変予測部152の一例を示す機能ブロック図である。
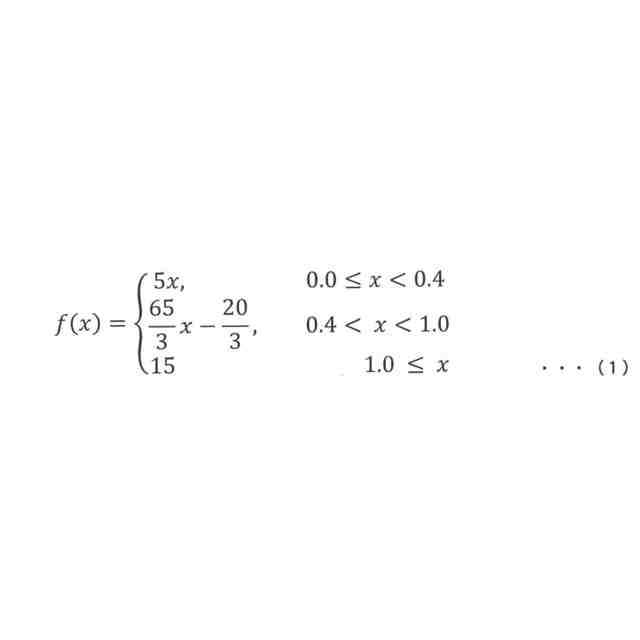
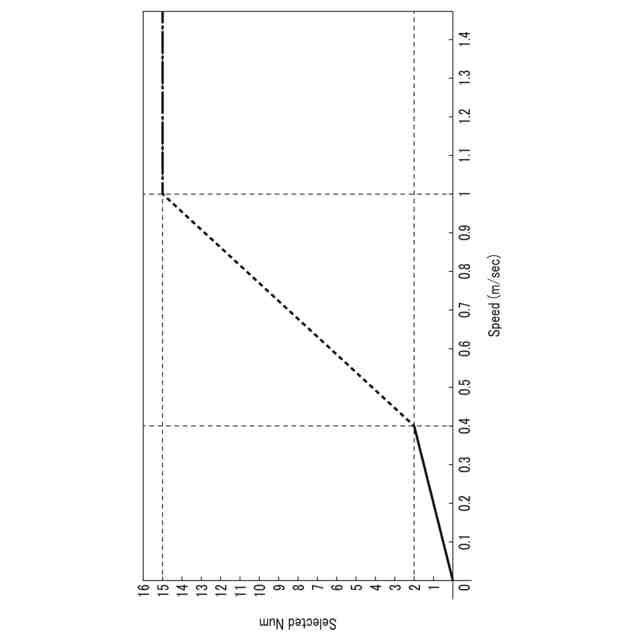
図5は、予測フレーム数を決定するための関数の一例を示すグラフである。
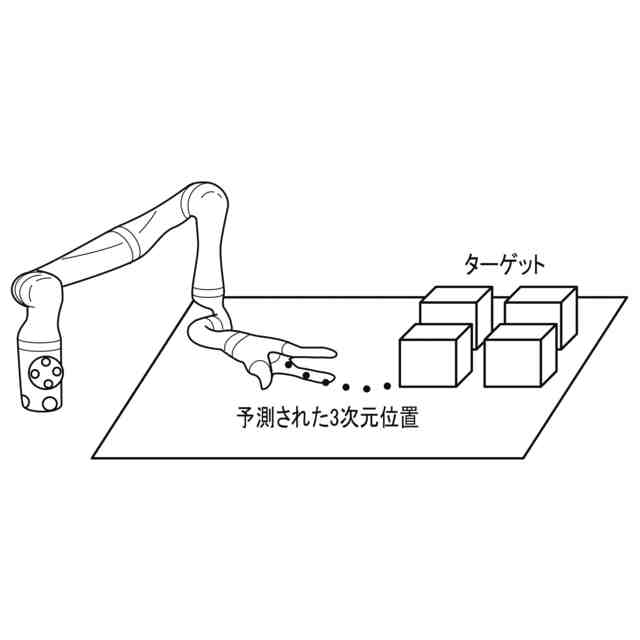
図6は、操作体11の予測位置を重畳した操作画面の一例を示す図である。
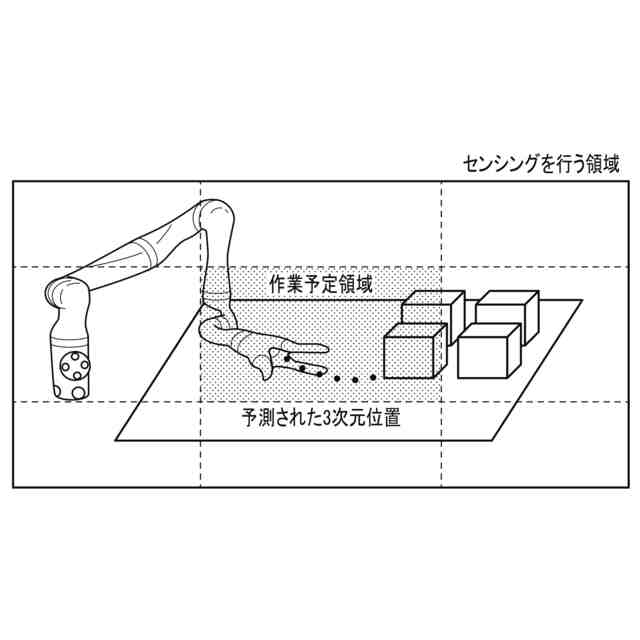
図7は、作業予定領域の抽出について説明するための図である。
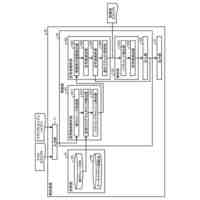
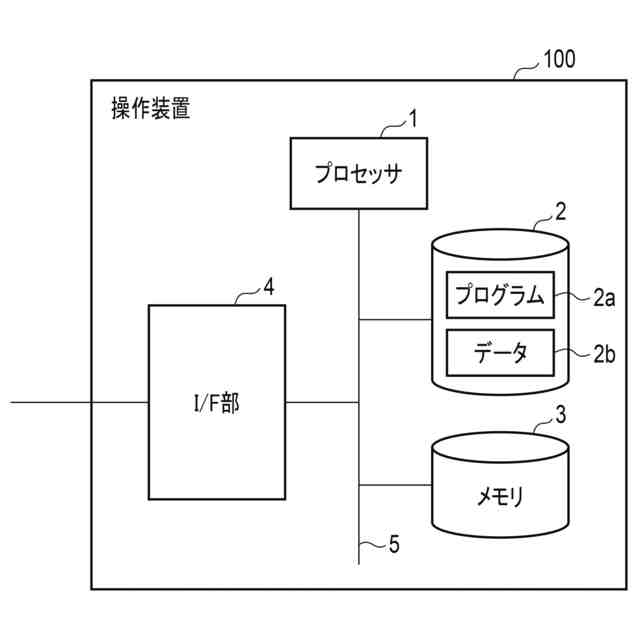
図8は、実施形態に係わる操作装置100のハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、図面を参照してこの発明に係わる実施形態を説明する。
(構成)
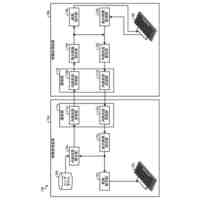
図1は、実施形態に係る遠隔作業システムの一例を示す図である。図1において、拠点A(マスター側)に操作装置100が設置され、拠点B(スレーブ側)にロボットアーム240(マニピュレータ)と、これを制御するロボット装置200が設置される。拠点AとBは地理的に離れており、操作装置100とロボット装置200は、インターネットに代表されるネットワークNW経由で通信する。
【0010】
拠点Aの操作者が操作体11を手に持って動かすと、その動きに応じてロボットアーム240が動く。つまり操作装置100は、操作体11の動きをネットワークNWを介してロボットアーム240の操作に反映する。その様子は拠点Bの表示用カメラ221で撮影され、画像データがネットワークNW経由で操作装置100に伝送される。画像データは操作装置100により映像化され、各種マーカとともに表示部12の操作画面に表示される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西日本電信電話株式会社
分析システム
3日前
日本電信電話株式会社
量子鍵配送装置
24日前
日本電信電話株式会社
光線路特性解析装置
25日前
日本電信電話株式会社
演算装置、演算方法及びプログラム
24日前
日本電信電話株式会社
抽出装置、抽出方法及び抽出プログラム
16日前
日本電信電話株式会社
管路位置探査装置及び管路位置探査方法
18日前
日本電信電話株式会社
解析装置、解析方法及び解析プログラム
16日前
日本電信電話株式会社
置換装置、置換方法および置換プログラム
5日前
日本電信電話株式会社
検証装置、検証方法および検証プログラム
16日前
日本電信電話株式会社
解析装置、解析方法および解析プログラム
16日前
日本電信電話株式会社
振動センシング装置及び振動センシング方法
17日前
日本電信電話株式会社
情報処理装置、調整方法および調整プログラム
10日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
4日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
4日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
3日前
日本電信電話株式会社
算出装置、算出システム、算出方法、及びプログラム
3日前
日本電信電話株式会社
感情提示装置、感情提示方法及び感情提示プログラム
1か月前
東日本電信電話株式会社
情報処理装置、情報処理方法、及び、情報処理プログラム
5日前
日本電信電話株式会社
翻訳装置、翻訳学習装置、翻訳方法、翻訳学習方法及びプログラム
5日前
日本電信電話株式会社
パラメータ更新保証システム、証明装置、パラメータ更新保証方法及びプログラム
26日前
日本電信電話株式会社
音声合成学習装置、音声合成装置、音声合成学習方法、音声合成方法及びプログラム
5日前
日本電信電話株式会社
エネルギー関数の最小値探索装置、エネルギー関数の最小値探索方法、及びプログラム。
24日前
日本電信電話株式会社
信号処理装置、信号処理方法及び信号処理プログラム
26日前
OMC株式会社
ロボット
1か月前
川崎重工業株式会社
ハンド
2か月前
株式会社クレスコ
補助吸着具
24日前
株式会社不二越
ロボット
16日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ