TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075619
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186911
出願日
2023-10-31
発明の名称
遠隔操作装置、遠隔操作方法、およびプログラム
出願人
日本電信電話株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G06F
3/0484 20220101AFI20250508BHJP(計算;計数)
要約
【課題】ロボットアームの遠隔での操作性を改善する遠隔操作装置及び遠隔操作方法を提供する。
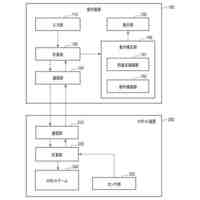
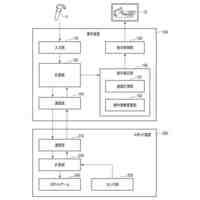
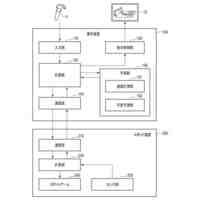
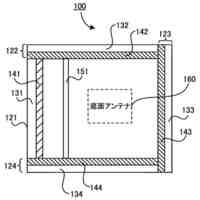
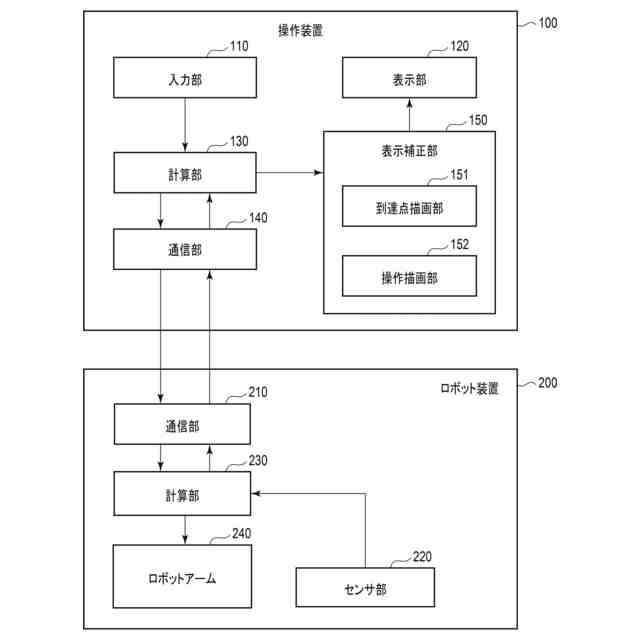
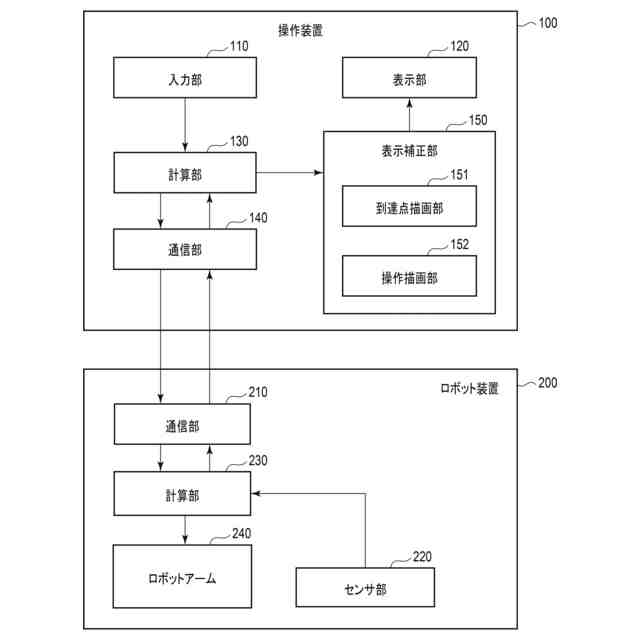
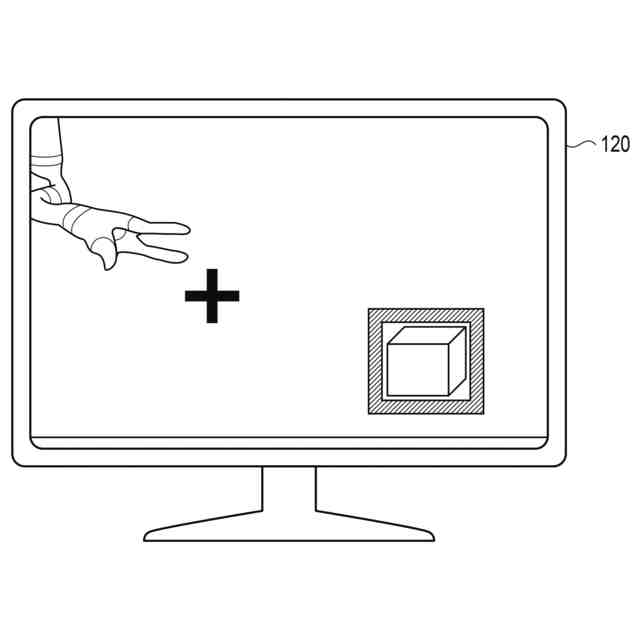
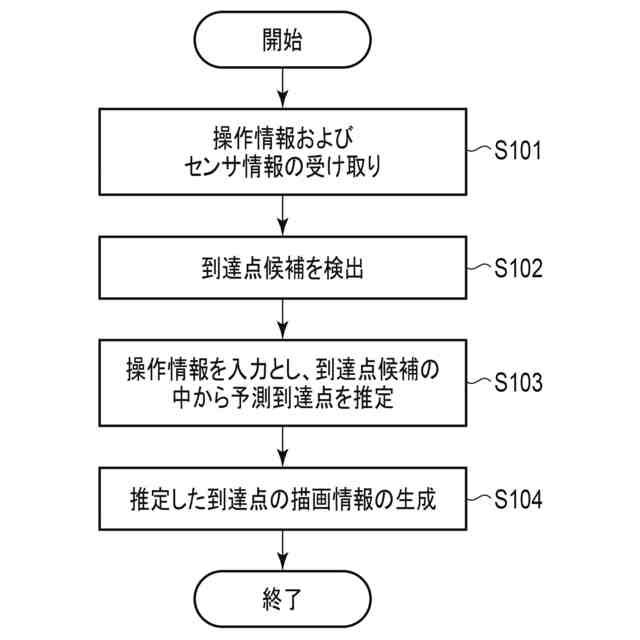
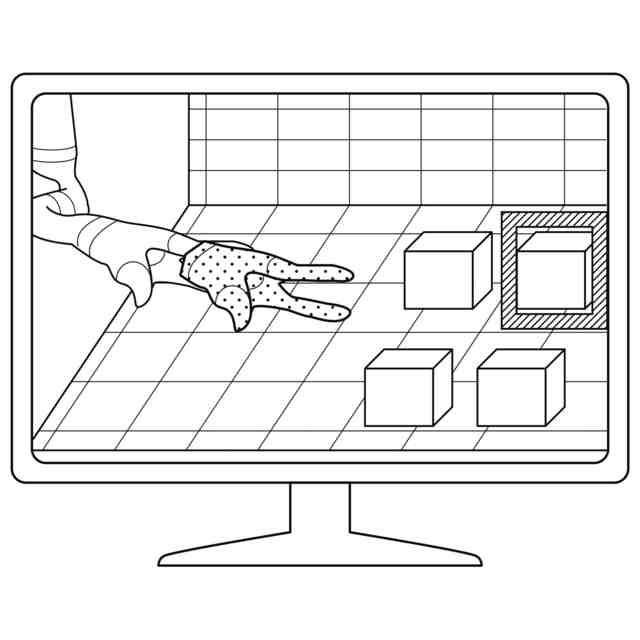
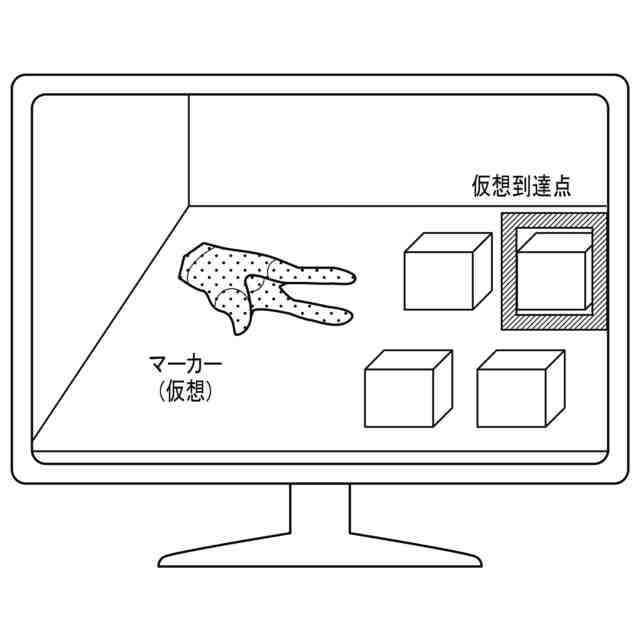
【解決手段】入力部110と、表示部120と、表示補正部150と、を具備し、ネットワークを介してとぼっと装置200ロボットアーム240を操作する操作装置100において、入力部110は、操作者の操作を反映する操作情報を取得する。表示部120は、操作画面を表示する。表示補正部150は、ロボットアームの到達点を推定して操作画面に重畳表示する。
【選択図】図2
特許請求の範囲
【請求項1】
ネットワークを介してロボットアームを操作する遠隔操作装置において、
操作者の操作を反映する操作情報を取得する入力部と、
操作画面を表示する表示部と、
前記ロボットアームの到達点を推定して前記操作画面に重畳表示する表示補正部とを具備する、遠隔操作装置。
続きを表示(約 760 文字)
【請求項2】
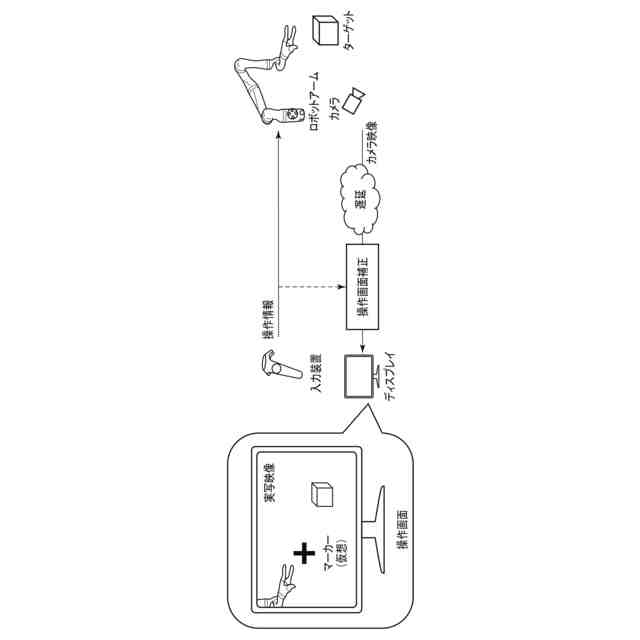
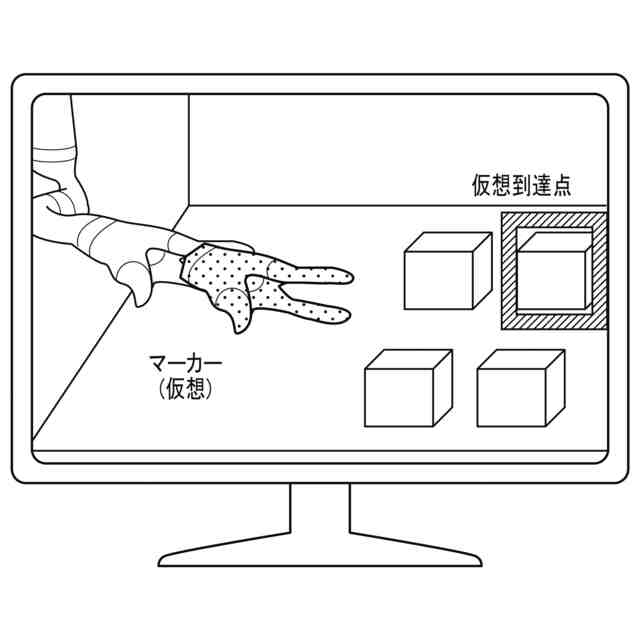
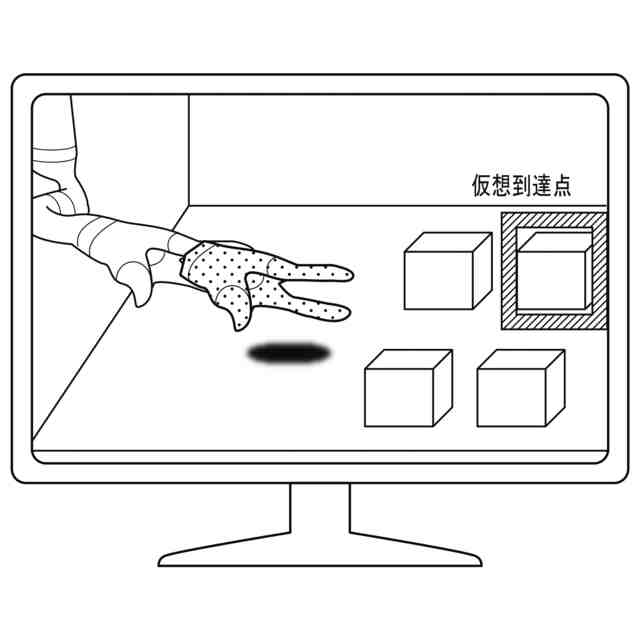
前記表示補正部は、操作対象のオブジェクトを取り囲むターゲットマーカ、または、前記ロボットアームの先端部であるエンドエフェクタの推定到達点を示すシンボルの少なくともいずれかを前記操作画面に表示する、請求項1に記載の遠隔操作装置。
【請求項3】
前記表示補正部は、前記ロボットアームの実写映像と、当該ロボットアームのイメージ画像とを前記操作画面に表示する、請求項2に記載の遠隔操作装置。
【請求項4】
前記表示補正部は、前記ロボットアームのイメージ画像に影を重畳して表示する、請求項3に記載の遠隔操作装置。
【請求項5】
前記表示補正部は、前記操作画面における前記ロボットアームの表示される空間に、グリッド状のメッシュを表示する、請求項3に記載の遠隔操作装置。
【請求項6】
前記表示補正部は、前記メッシュのサイズを可変する、請求項5に記載の遠隔操作装置。
【請求項7】
前記表示補正部は、前記操作画面から前記ロボットアームの実写映像を消去する、請求項2に記載の遠隔操作装置。
【請求項8】
前記表示補正部は、前記操作画面における注意領域と、当該注意領域以外の部分とを前記操作画面において区別して表示する、請求項2に記載の遠隔操作装置。
【請求項9】
前記表示補正部は、前記注意領域以外の部分を前記操作画面において暗転、または明転して表示する、請求項8に記載の遠隔操作装置。
【請求項10】
前記表示補正部は、前記注意領域以外の部分の解像度を、前記操作画面において前記注意領域よりも下げて表示する、請求項8に記載の遠隔操作装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明の一態様は、ロボットアームを遠隔で操作することを支援する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ロボットアームは、高度医療やFA(Factory Automation)など、多くの分野で利用されるようになってきている。近年では5Gなどの通信技術と組み合わせ、遠隔からロボットアームを操作するシステムが開発されようとしている。直観的な操作インタフェースによりロボットアームの遠隔操作を支援することも試みられている。
【0003】
遠隔でのロボットアームの反応は、通信遅延や駆動処理での遅延により遅れることがあり、これは操作性の低下をもたらす。これに対し、遅延による反応の遅れがないエンドエフェクタ(仮想的なロボットアーム、あるいはロボットアームの先端位置を表すマーカなどの総称)を操作画面に重畳して提示することが提案された(例えば、非特許文献1を参照)。
【0004】
また、操作性の向上や操作負荷の軽減のため、操作者の操作に基づく制御とロボット側の自律的な制御とを組み合わせる、共有制御技術が提案された。旧来の共有制御技術では、手動操作と自律制御の単純な切り替えや、双方の平均値で制御するといった方法が用いられてきた。近年では機械学習を用いて操作者の操作意図を推定し、自律制御に反映させることで、操作者にとってより自然な操作補正を行うことが可能となってきた(例えば、非特許文献2を参照)。
【先行技術文献】
【非特許文献】
【0005】
Florian Richter, Yifei Zhang, Yuheng Zhi, Ryan K. Orosco, Michael C. Yip: Augmented Reality Predictive Displays to Help Mitigate the Effects of Delayed Telesurgery. ICRA 2019: 444-450
Bao Xi, Shuo Wang, Xuemei Ye, Yinghao Cai, Tao Lu, and Rui Wang. 2019. A robotic shared control teleoperation method based on learning from demon-strations. International Journal of Advanced Robotic Systems 16, 4 (2019)
【発明の概要】
【発明が解決しようとする課題】
【0006】
非特許文献1の技術では、遠隔のカメラからの実写映像と、重畳されている仮想的なロボットアームとの両方を同時に見ながら作業しなくてはならない。このため、操作のしづらさや操作者が疲労感を感じるといった新たな不具合を生むことが分かってきた。特に、実写映像とエンドエフェクタとの奥行き感の違いにより、操作者は無視できない違和感を感じる。
【0007】
非特許文献2の技術にも改善の余地があり、特に、自律制御による操作の補正が大きい場合に解決すべき事柄があった。例えば、自律制御と操作者の意図が一致しない場合がある。たとえ両者が一致したとしても、動きのタイミングや動かし方が操作者の想定と異なる場合には、操作者の主体感の低下や不快感がもたらされる。逆に、操作者にとって違和感のない自律制御が達成できているケースでは、操作者の操作の仕方が通常時と変化してしまうので、操作意図を的確に推定することが難しくなる。
【0008】
いずれの場合においても操作性が損なわれることになり、対処が望まれる。
この発明は上記事情に着目してなされたもので、ロボットアームの遠隔での操作性を改善することを可能にする技術を提供しようとするものである。
【課題を解決するための手段】
【0009】
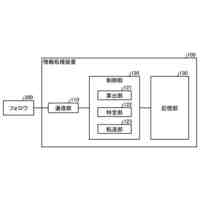
この発明の一態様に係わる遠隔操作装置は、ネットワークを介してロボットアームを操作する遠隔操作装置において、入力部と、表示部と、表示補正部とを具備する。入力部は、操作者の操作を反映する操作情報を取得する。表示部は、操作画面を表示する。表示補正部は、ロボットアームの到達点を推定して操作画面に重畳表示する。
【発明の効果】
【0010】
この発明の一態様によれば、ロボットアームの遠隔での操作性を改善することを可能にする技術を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西日本電信電話株式会社
分析システム
3日前
日本電信電話株式会社
解析装置、解析方法及び解析プログラム
16日前
日本電信電話株式会社
抽出装置、抽出方法及び抽出プログラム
16日前
日本電信電話株式会社
置換装置、置換方法および置換プログラム
5日前
日本電信電話株式会社
検証装置、検証方法および検証プログラム
16日前
日本電信電話株式会社
解析装置、解析方法および解析プログラム
16日前
日本電信電話株式会社
情報処理装置、調整方法および調整プログラム
10日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
3日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
4日前
日本電信電話株式会社
遠隔操作装置、遠隔操作方法、およびプログラム
4日前
日本電信電話株式会社
算出装置、算出システム、算出方法、及びプログラム
3日前
東日本電信電話株式会社
情報処理装置、情報処理方法、及び、情報処理プログラム
5日前
日本電信電話株式会社
翻訳装置、翻訳学習装置、翻訳方法、翻訳学習方法及びプログラム
5日前
日本電信電話株式会社
音声合成学習装置、音声合成装置、音声合成学習方法、音声合成方法及びプログラム
5日前
個人
物品給付年金
3日前
個人
非正規コート
1か月前
個人
在宅介護システム
16日前
個人
RFタグ読取装置
16日前
個人
人物再現システム
1か月前
個人
AI飲食最適化プラグイン
24日前
キヤノン株式会社
通信装置
4日前
個人
電話管理システム及び管理方法
25日前
有限会社ノア
データ読取装置
1か月前
個人
広告提供システムおよびその方法
1か月前
株式会社ザメディア
出席管理システム
1か月前
株式会社CROSLAN
支援装置
16日前
個人
日誌作成支援システム
1か月前
個人
ポイント還元付き配送システム
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
工程計画装置
1か月前
ミサワホーム株式会社
情報処理装置
3日前
長屋印刷株式会社
画像形成システム
16日前
ひびきの電子株式会社
認証システム
18日前
トヨタ自動車株式会社
作業判定方法
1か月前
株式会社タクテック
商品取出集品システム
1か月前
オベック実業株式会社
接続構造
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ