TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068756
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023178741
出願日
2023-10-17
発明の名称
ワイヤアーク積層造形法、ワイヤアーク積層造形システム、制御情報生成装置、制御装置、およびプログラム
出願人
清水建設株式会社
,
国立研究開発法人宇宙航空研究開発機構
代理人
個人
,
個人
,
個人
主分類
B23K
9/04 20060101AFI20250422BHJP(工作機械;他に分類されない金属加工)
要約
【課題】より安定した温度条件で積層造形を行うことができるワイヤアーク積層造形法を提供すること。
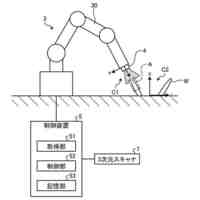
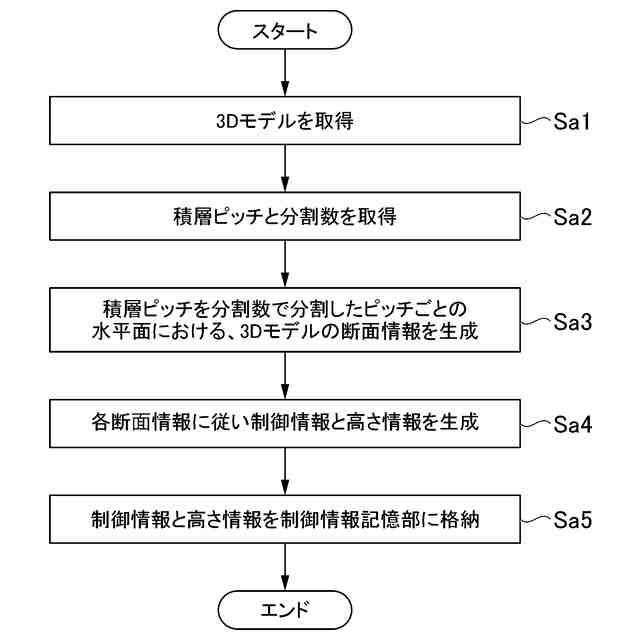
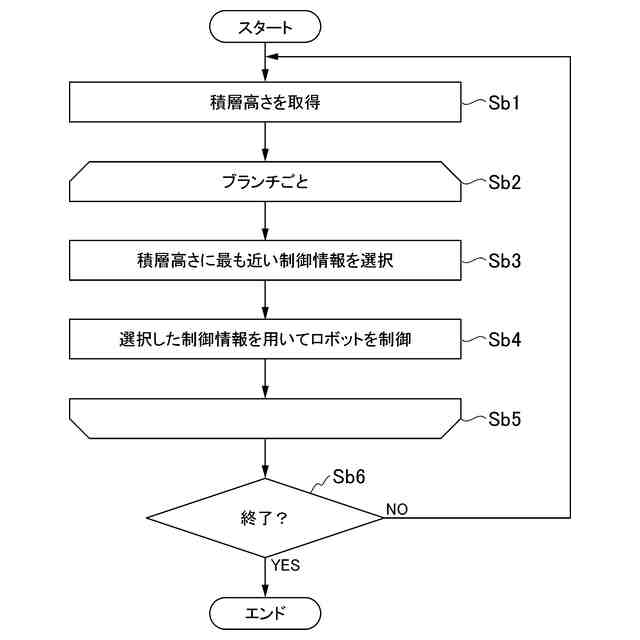
【解決手段】ワイヤアーク積層造形法であって、ワイヤアーク積層造形を行うロボットの制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する第1のステップと、現在の積層高さを検出する第2のステップと、第1のステップにより生成された制御情報の中から、第2のステップにより検出された現在の積層高さに対応する制御情報を選択する第3のステップと、第3のステップで選択された制御情報を用いて、ロボットを制御する第4のステップとを有するワイヤアーク積層造形法である。
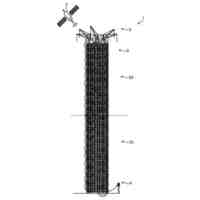
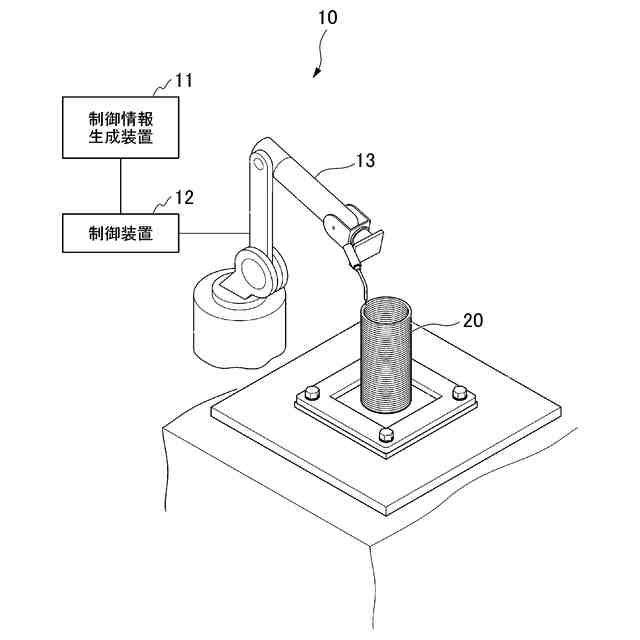
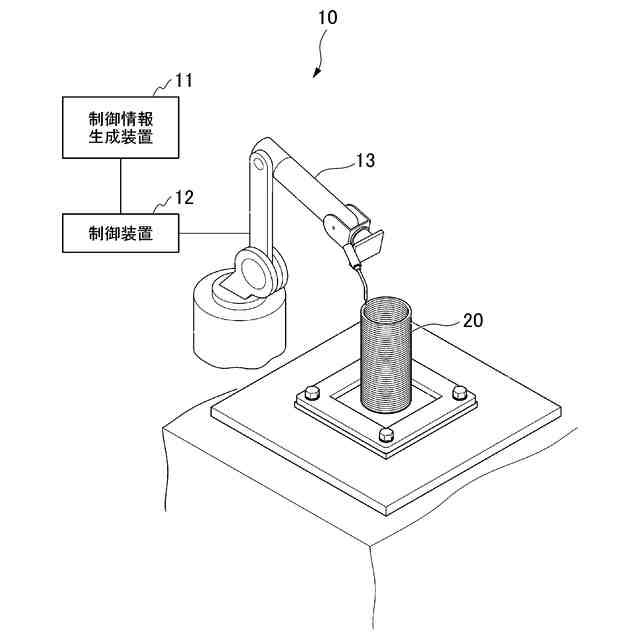
【選択図】図1
特許請求の範囲
【請求項1】
ワイヤアーク積層造形法であって、
ワイヤアーク積層造形を行うロボットの制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する第1のステップと、
現在の積層高さを検出する第2のステップと、
前記第1のステップにより生成された前記制御情報の中から、前記第2のステップにより検出された前記現在の積層高さに対応する制御情報を選択する第3のステップと、
前記第3のステップで選択された制御情報を用いて、前記ロボットを制御する第4のステップと
を有するワイヤアーク積層造形法。
続きを表示(約 1,000 文字)
【請求項2】
前記積層ピッチよりも細かいピッチは、前記積層ピッチを1/3以下に分割したピッチである、請求項1に記載のワイヤアーク積層造形法。
【請求項3】
ワイヤアーク積層造形を行うロボットと、
前記ロボットを制御する制御装置と、
前記制御装置が用いる前記ロボットの制御情報を生成する制御情報生成装置と
を備えるワイヤアーク積層造形システムであって、
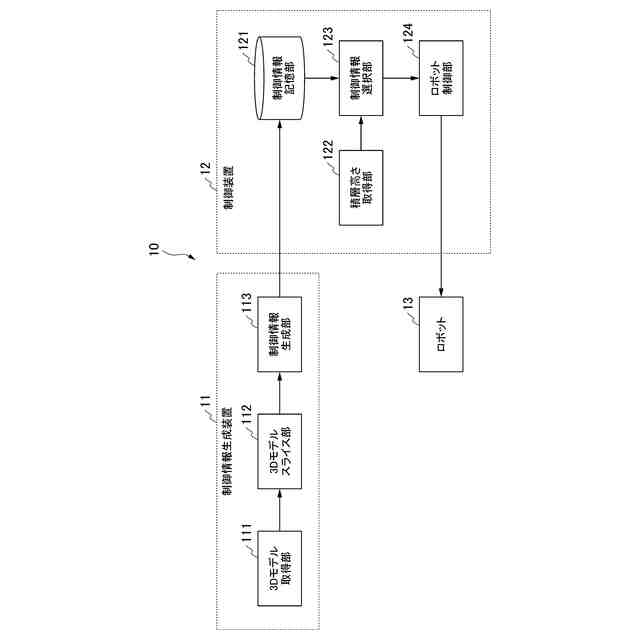
前記制御情報生成装置は、
前記制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成し、
前記制御装置は、
現在の積層高さを取得する積層高さ取得部と、
前記制御情報の中から、前記積層高さ取得部が取得した前記現在の積層高さに対応する制御情報を選択し、選択された前記制御情報を用いて、前記ロボットを制御するロボット制御部と
を備える、ワイヤアーク積層造形システム。
【請求項4】
ワイヤアーク積層造形を行うロボットの制御情報を生成する制御情報生成装置であって、
前記制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する、
制御情報生成装置。
【請求項5】
ワイヤアーク積層造形を行うロボットの制御装置であって、
現在の積層高さを取得する積層高さ取得部と、
積層ピッチよりも細かいピッチで積層高さ毎に生成された制御情報の中から、前記積層高さ取得部が取得した前記現在の積層高さに対応する制御情報を選択し、選択された前記制御情報を用いて、前記ロボットを制御するロボット制御部と
を備える制御装置。
【請求項6】
コンピュータを、
ワイヤアーク積層造形を行うロボットの制御情報を生成する制御情報生成装置として機能させるプログラムであって、
前記制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する、
プログラム。
【請求項7】
ワイヤアーク積層造形を行うロボットの制御装置のコンピュータを、
現在の積層高さを取得する積層高さ取得部、
積層ピッチよりも細かいピッチで積層高さ毎に生成された制御情報の中から、前記積層高さ取得部が取得した前記現在の積層高さに対応する制御情報を選択し、選択された前記制御情報を用いて、前記ロボットを制御するロボット制御部
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワイヤアーク積層造形法、ワイヤアーク積層造形システム、制御情報生成装置、制御装置、およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、WAAM(Wire arc additive manufacturing)の装置構成として、アーク溶接ロボットを用いて金属材料の積層を行うものが知られている。特許文献1には、積層されたビードの形状を測定し、測定された形状に応じて積層軌道計画を更新する積層造形方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6797324号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の積層造形方法においては、積層する度に積層軌道計画を更新するため、一般に多くの計算時間が必要な積層軌道計画の更新の間にビードの温度が変わってしまうため、溶接する際の温度条件が不安定になってしまうことがあるという問題がある。溶接する際の温度条件が不安定になると、造形物の形状、あるいは金属組織に影響してしまうことがある。
【0005】
本発明は、このような事情に鑑みてなされたもので、より安定した温度条件で積層造形を行うことができるワイヤアーク積層造形法、ワイヤアーク積層造形システム、制御情報生成装置、制御装置、およびプログラムを提供する。
【課題を解決するための手段】
【0006】
この発明は上述した課題を解決するためになされたもので、本発明の一態様は、ワイヤアーク積層造形法であって、ワイヤアーク積層造形を行うロボットの制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する第1のステップと、現在の積層高さを検出する第2のステップと、前記第1のステップにより生成された前記制御情報の中から、前記第2のステップにより検出された前記現在の積層高さに対応する制御情報を選択する第3のステップと、前記第3のステップで選択された制御情報を用いて、前記ロボットを制御する第4のステップとを有するワイヤアーク積層造形法である。
【0007】
また、本発明の他の一態様は、上述したワイヤアーク積層造形法であって、前記積層ピッチよりも細かいピッチは、前記積層ピッチを1/3以下に分割したピッチである。
【0008】
また、本発明の他の一態様は、ワイヤアーク積層造形を行うロボットと、前記ロボットを制御する制御装置と、前記制御装置が用いる前記ロボットの制御情報を生成する制御情報生成装置とを備えるワイヤアーク積層造形システムであって、前記制御情報生成装置は、前記制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成し、前記制御装置は、現在の積層高さを取得する積層高さ取得部と、前記制御情報の中から、前記積層高さ取得部が取得した前記現在の積層高さに対応する制御情報を選択し、選択された前記制御情報を用いて、前記ロボットを制御するロボット制御部とを備える、ワイヤアーク積層造形システムである。
【0009】
また、本発明の他の一態様は、ワイヤアーク積層造形を行うロボットの制御情報を生成する制御情報生成装置であって、前記制御情報を、積層ピッチよりも細かいピッチで積層高さ毎に生成する、制御情報生成装置である。
【0010】
また、本発明の他の一態様は、ワイヤアーク積層造形を行うロボットの制御装置であって、現在の積層高さを取得する積層高さ取得部と、積層ピッチよりも細かいピッチで積層高さ毎に生成された制御情報の中から、前記積層高さ取得部が取得した前記現在の積層高さに対応する制御情報を選択し、選択された前記制御情報を用いて、前記ロボットを制御するロボット制御部とを備える制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
構造物
1か月前
清水建設株式会社
耐風装置
1か月前
清水建設株式会社
制振装置
1か月前
清水建設株式会社
混合構造梁
1か月前
清水建設株式会社
ビス打ち装置
2か月前
清水建設株式会社
放射線遮蔽壁
2か月前
清水建設株式会社
ブレーキ装置
1か月前
清水建設株式会社
土壌浄化装置
1か月前
清水建設株式会社
土壌浄化装置
1か月前
清水建設株式会社
集塵ユニット
12日前
清水建設株式会社
自動ビス打ち機
2か月前
清水建設株式会社
床版取替え方法
1か月前
清水建設株式会社
放射線遮蔽構造
1か月前
清水建設株式会社
杭及び杭の施工方法
2か月前
清水建設株式会社
アバター診察システム
1か月前
清水建設株式会社
発塵源推定方法及び解析装置
23日前
清水建設株式会社
超々高層建物の通信システム
1か月前
清水建設株式会社
コンクリート配管の接続構造
1か月前
清水建設株式会社
移動ロボットの位置推定システム
16日前
清水建設株式会社
浮体構造物および洋上風力発電施設
2か月前
清水建設株式会社
地下水揚水装置および地下水揚水方法
1か月前
清水建設株式会社
地下水観測装置および地下水観測方法
1か月前
清水建設株式会社
建物の地震時変位応答を評価する方法
18日前
清水建設株式会社
地下水観測装置および地下水観測方法
1か月前
清水建設株式会社
構造体移動装置および構造体移動方法
26日前
清水建設株式会社
組積造構造物の補強構造および補強方法
1か月前
清水建設株式会社
洗浄性評価方法及び洗浄性評価デバイス
3日前
清水建設株式会社
地盤の剛性評価方法および剛性評価装置
24日前
清水建設株式会社
設備基礎の支持構造及び設備基礎の施工方法
1か月前
清水建設株式会社
セメント硬化体、バイオ炭の分布の解析方法
1か月前
清水建設株式会社
金属造形物製造装置、及び金属造形物製造方法
1か月前
清水建設株式会社
利用管理装置、利用管理方法、およびプログラム
1か月前
清水建設株式会社
案内制御装置、案内制御方法、およびプログラム
2か月前
清水建設株式会社
情報処理装置、情報処理方法、およびプログラム
2か月前
清水建設株式会社
移動ロボットの位置推定システム及び位置推定方法
16日前
清水建設株式会社
設備制御システム、設備制御方法、およびプログラム
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ