TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083010
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196628
出願日
2023-11-20
発明の名称
移動ロボットの位置推定システム及び位置推定方法
出願人
清水建設株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G01S
1/70 20060101AFI20250523BHJP(測定;試験)
要約
【課題】建物の屋内において、移動ロボットの自己位置の見失いを抑制でき、移動ロボットを正確かつ円滑に移動させ易い、移動ロボットの位置推定システム及び位置推定方法を提供すること。
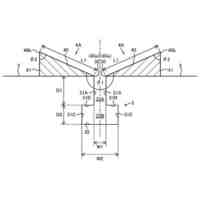
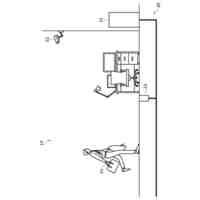
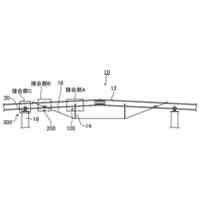
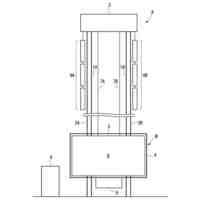
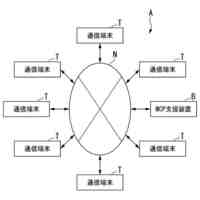
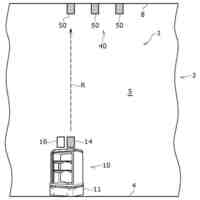
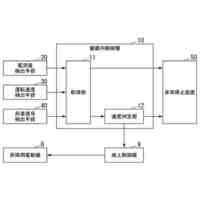
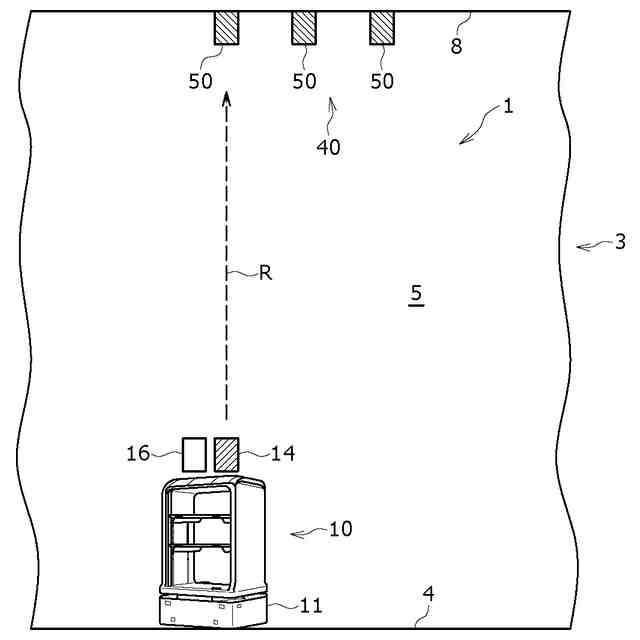
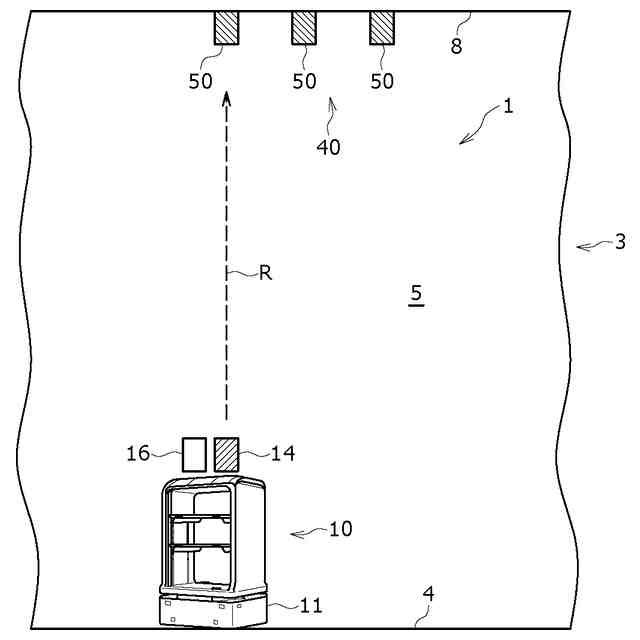
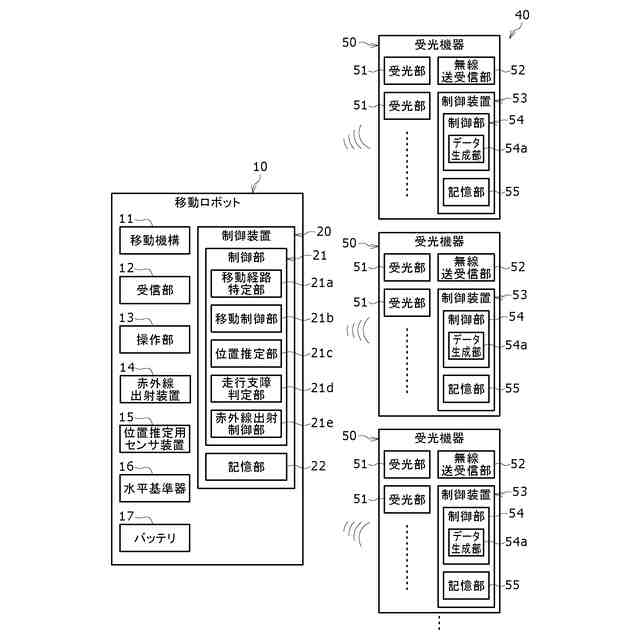
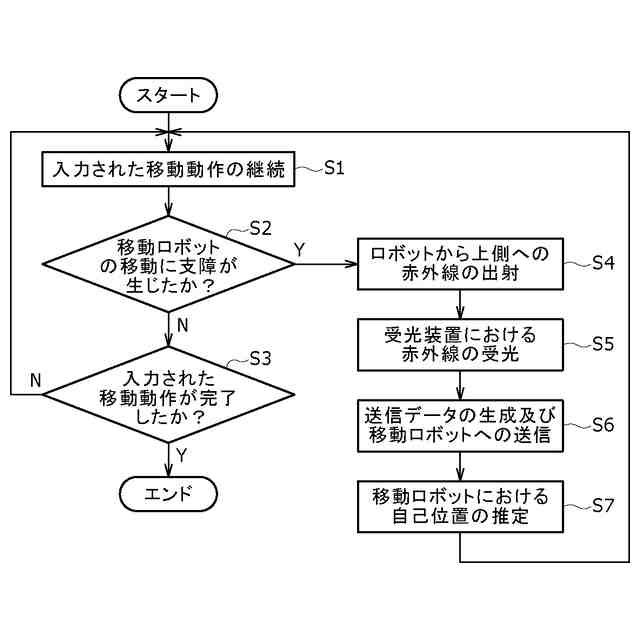
【解決手段】位置推定システム1が、赤外線出射装置14、及び移動を制御する制御装置を有する移動ロボット10と、建物3の天井8に設置されるか又は天井8に取り付けられた天井取付部に設置された受光装置40を備える。制御装置が、赤外線出射装置14から出射されて受光装置40で受光された光の情報に基づく位置情報に基づいて移動ロボット10の位置を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
発光装置及び受光装置のうちの一方、及び移動を制御する制御装置を有する移動ロボットと、
建物の天井に設置されるか又は前記天井に取り付けられた天井取付部に設置された前記発光装置及び前記受光装置のうちの他方と、を備え、
前記制御装置が、前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報に基づいて前記移動ロボットの位置を推定する、移動ロボットの位置推定システム。
続きを表示(約 1,000 文字)
【請求項2】
前記発光装置が前記移動ロボットに搭載されると共に、前記受光装置が前記天井に設置されるか又は前記天井に取り付けられた天井取付部に設置され、
前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報を、前記移動ロボットに送信する通信装置を備え、
前記発光装置が、前記移動ロボットの高さ方向に光を出射する、請求項1に記載の移動ロボットの位置推定システム。
【請求項3】
前記発光装置が前記移動ロボットに搭載されると共に、前記受光装置が前記天井に設置されるか又は前記天井に取り付けられた天井取付部に設置され、
前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報を、前記移動ロボットに送信する通信装置を備え、
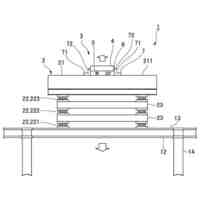
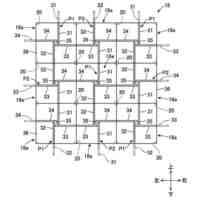
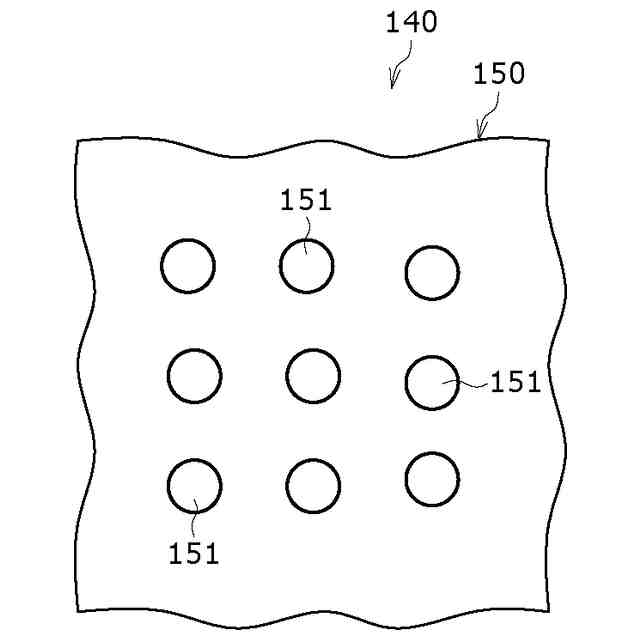
前記受光装置は、間隔をおいて配置された複数の受光部を含み、
前記位置情報が、前記複数の受光部に含まれる1以上の前記受光部が受光した光に関連する当該1以上の情報を含む、請求項1に記載の移動ロボットの位置推定システム。
【請求項4】
N及びMが、(N+M)≧4を満たす自然数であるとき、
下側から鉛直方向に前記複数の受光部を見たときの平面視において、
前記複数の受光部が、ビッチが略同一になっていると共にN行M列にマトリクス状に配置されたN×M個の配列受光部を含む、請求項3に記載の移動ロボットの位置推定システム。
【請求項5】
前記位置情報が、2以上の前記受光部が受光した光の強度に基づく情報である、請求項3又は4に記載の移動ロボットの位置推定システム。
【請求項6】
前記天井に設置されるか又は前記天井に取り付けられた天井取付部に設置された前記発光装置及び前記受光装置のうちの他方における前記建物の側壁からの最短距離が、2m以上である、請求項1に記載の移動ロボットの位置推定システム。
【請求項7】
移動ロボットに発光装置及び受光装置のうちの一方を設置するステップと、
建物の天井又は前記天井に取り付けられた天井取付部に前記発光装置及び前記受光装置のうちの他方を設置するステップと、
前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報に基づいて移動ロボットが自己の位置を推定するステップと
を含む、移動ロボットの位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動ロボットの位置推定システム及び位置推定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、移動ロボットの位置推定システムとしては、特許文献1に記載されているものがある。この位置推定システムでは、移動ロボットがライダーセンサと記憶部を備える。この位置推定システムでは、移動ロボットがライダーセンサを介して取得した地形情報を記憶部に予め記憶されている地形情報と比較することで移動ロボットの存在位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特許7356566号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本件発明者は、次の新規の課題を見出した。詳しくは、屋内空間で、移動ロボットが自己位置を見失って、任務を遂行できなくなる場合があることを見出した。また、特に、建物の大空間アトリウムの内部のように、天井が高くて、広い屋内空間で、かつ、ガラス壁で囲まれたような空間の場合に、移動ロボットが搭載しているライダーセンサ等のセンサが出射した波(例えば、レーザーや光線等)が、側壁を透過する等して側壁でうまく反射しなくて、移動ロボットが反射波の情報を取得しにくい場合が生じ易くなり、移動ロボットが移動に支障をきたす場合が顕著になることを見出した。そこで、本開示の目的は、建物の屋内において、移動ロボットの自己位置の見失いを抑制でき、移動ロボットを正確かつ円滑に移動させ易い、移動ロボットの位置推定システム及び位置推定方法を提供することにある。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本開示に係る移動ロボットの位置推定システムは、発光装置及び受光装置のうちの一方、及び移動を制御する制御装置を有する移動ロボットと、建物の天井に設置されるか又は前記天井に取り付けられた天井取付部に設置された前記発光装置及び前記受光装置のうちの他方と、を備え、前記制御装置が、前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報に基づいて前記移動ロボットの位置を推定する。
【0006】
天井又は天井取付部に取り付けられた発光装置又は受光装置の位置情報は、予め既知である。したがって、発光装置から出射されて受光装置で受光された光の情報には、位置情報が含まれる。本開示によれば、移動ロボットが、発光装置から出射されて受光装置で受光された光の情報を取得するので、天井又は天井取付部に取り付けられた発光装置又は受光装置の既知の位置情報に基づく情報を取得できる。よって、移動ロボットが、自己位置を見失い易い箇所周辺の上方に位置する天井又は天井取付部に発光装置又は受光装置を取り付けるだけで、移動ロボットの自己位置の見失いを抑制でき、移動ロボットを正確かつ円滑に移動させ易い。
【0007】
また、前記発光装置が前記移動ロボットに搭載されると共に、前記受光装置が前記天井に設置されるか又は前記天井に取り付けられた天井取付部に設置され、前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報を、前記移動ロボットに送信する通信装置を備え、前記発光装置が、略鉛直方向に光を出射してもよい。
【0008】
本構成によれば、発光装置が、略鉛直方向に光を出射するので、光の出射位置、ひいては、移動ロボットの存在位置を正確に推定し易い。なお、光は、如何なる光であってもよく、例えば、可視光や紫外線や赤外線でもよいが、光が赤外線の場合、直進性に優れる赤外線が略鉛直方向に出射されることになるので、赤外線の出射位置が更に正確に推定され易い。
【0009】
また、発光装置が移動ロボットに搭載される構成であるので、ランニングコストやメンテナンスコストが受光装置よりも高くなり易い発光装置の数を低減し易く、ランニングコストやメンテナンスコストを低減し易い。
【0010】
また、前記発光装置が前記移動ロボットに搭載されると共に、前記受光装置が前記天井に設置されるか又は前記天井に取り付けられた天井取付部に設置され、前記発光装置から出射されて前記受光装置で受光された光の情報に基づく位置情報を、前記移動ロボットに送信する通信装置を備え、前記受光装置は、間隔をおいて配置された複数の受光部を含み、前記位置情報は、前記複数の受光部に含まれる1以上の前記受光部が受光した光に関連する当該1以上の情報を含んでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
外装材
1か月前
清水建設株式会社
制振装置
3日前
清水建設株式会社
耐風装置
24日前
清水建設株式会社
水素貯蔵容器
1か月前
清水建設株式会社
集塵ユニット
2か月前
清水建設株式会社
塔体の切断装置
1日前
清水建設株式会社
空調制御システム
1か月前
清水建設株式会社
機械排煙システム
16日前
清水建設株式会社
カーテンウォール
1か月前
清水建設株式会社
建物のエコシステム
26日前
清水建設株式会社
ロボット制御システム
2日前
清水建設株式会社
木鋼接合部の耐火構造
1か月前
清水建設株式会社
ブラインド制御システム
11日前
富士電機株式会社
タンク
1か月前
富士電機株式会社
タンク
1か月前
清水建設株式会社
プレキャスト床版の接合構造
24日前
清水建設株式会社
工事用エレベータ及び騒音低減方法
25日前
中日本高速道路株式会社
眩光防止板
1か月前
清水建設株式会社
空間管理システムおよび空間管理方法
1か月前
清水建設株式会社
マーカー抽出システム及びプログラム
1か月前
清水建設株式会社
構造体取替装置および構造体取替方法
1か月前
清水建設株式会社
補修箇所抽出装置及び補修箇所抽出方法
5日前
清水建設株式会社
洗浄性評価方法及び洗浄性評価デバイス
1か月前
清水建設株式会社
水素貯蔵容器および水素吸蔵合金の投入方法
1か月前
清水建設株式会社
事業継続支援装置及び事業継続支援システム
2日前
清水建設株式会社
構造部材の製造装置および構造部材の製造方法
1か月前
三商株式会社
建築部材及び建築部材の製造方法
1か月前
清水建設株式会社
建築物内圧制御システム及び建築物内圧制御方法
3日前
清水建設株式会社
移動ロボットの位置推定システム及び位置推定方法
2か月前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
1か月前
清水建設株式会社
工事用エレベータおよび工事用エレベータの制御方法
25日前
清水建設株式会社
病院
1日前
清水建設株式会社
3Dモデル生成方法、施工方法、及び3Dモデル生成装置
1か月前
清水建設株式会社
吹付コンクリート評価装置及び吹付コンクリート評価方法
1か月前
清水建設株式会社
掘削時のリバウンド抑制方法、リバウンド抑制構造および設計方法
1か月前
清水建設株式会社
人流推定システム、人流推定装置、人流推定方法、及びプログラム
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ