TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068562
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2024044064
出願日
2024-03-19
発明の名称
作業割当装置、作業割当方法、およびコンピュータプログラム
出願人
株式会社豊田中央研究所
,
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社豊田自動織機
,
株式会社アイシン
代理人
個人
,
個人
主分類
G06Q
50/04 20120101AFI20250421BHJP(計算;計数)
要約
【課題】各作業者に対する作業の割り当てと、各作業者が割り当てられた作業を開始する時刻についてのスケジュールとを、要望に応じて適正化する。
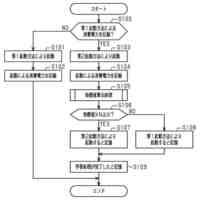
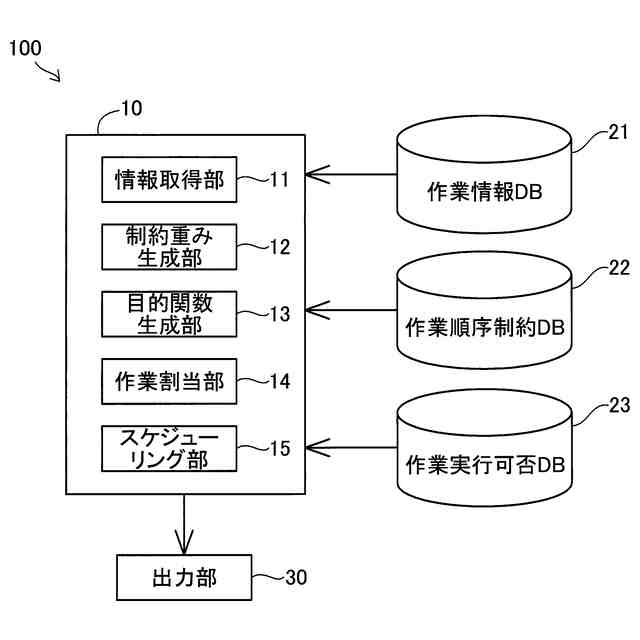
【解決手段】作業割当装置は、作業を作業者が行う際の作業時間と、作業者が作業を行う際の作業コストと、人の作業者に発生する作業負荷と、の情報を取得する情報取得部と、作業時間と、作業コストと、作業負荷と、の少なくとも1つに関連する値をパラメータとする目的関数であって、パラメータに対して乗じる重みを設定した目的関数を生成する目的関数生成部と、目的関数が最小化する又は最大化するように、各作業者が行う作業を割り当てる作業割当部と、各作業者の作業完了時間に関連する値をパラメータとする第2目的関数を最小化する又は最大化することにより、最大の作業完了時間が小さくなるように各作業者が作業を始める作業開始時間を調整する調整部と、を備える。
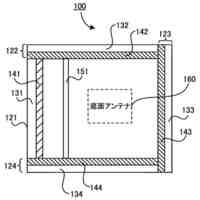
【選択図】図1
特許請求の範囲
【請求項1】
作業割当装置であって、
人またはロボットである作業者によって行われる作業を作業者が行う際の作業時間と、作業者が前記作業を行う際の作業コストと、前記作業が人の作業者により行われる場合に前記作業を行った作業者に発生する作業負荷と、の情報を取得する情報取得部と、
前記作業時間と、前記作業コストと、前記作業負荷と、の少なくとも1つに関連する値をパラメータとする第1目的関数であって、パラメータのそれぞれに対して乗じる重みを設定した第1目的関数を生成する目的関数生成部と、
前記第1目的関数が最小化する又は最大化するように、各作業者が行う前記作業を割り当てる作業割当部と、
各作業者が割り当てられた全ての前記作業を完了するまでのそれぞれの作業完了時間に関連する値をパラメータとする第2目的関数を最小化する又は最大化することにより、作業者ごとの前記作業完了時間の内の最大の前記作業完了時間である最大作業完了時間が小さくなるように各作業者が割り当てられた前記作業を始めるそれぞれの作業開始時間を調整する調整部と、
を備える、作業割当装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の作業割当装置であって、
前記情報取得部は、さらに、複数の前記作業が行われる際の順序の制約である作業順序制約を取得し、
前記目的関数生成部は、前記作業順序制約に関連する値をパラメータとして含む前記第1目的関数を生成し、
前記調整部は、前記作業完了時間と、前記作業順序制約とのそれぞれに関連する値をパラメータとして含む前記第2目的関数を最小化する又は最大化する、作業割当装置。
【請求項3】
請求項2に記載の作業割当装置であって、さらに、
前記作業順序制約が設定されている前記作業の作業順序に応じて前記作業に設定する重みである順序制約重みを生成する制約重み生成部を備え、
前記制約重み生成部は、
前記作業順序制約が設定されている前記作業の全てを、前記作業順序制約が相互に関連する複数の前記作業ごとに分けた作業グループに抽出し、
抽出された異なる前記作業グループに含まれる複数の前記作業に対して、複数の作業者が同時に実行可能であると共に前記作業グループ内において作業順序が早い前記作業ほど大きい前記順序制約重みを設定する、作業割当装置。
【請求項4】
請求項3に記載の作業割当装置であって、
前記目的関数生成部は、前記作業時間と、前記作業コストと、前記作業負荷と、前記作業順序制約とのそれぞれに関連する値をパラメータとして含む前記第1目的関数を生成する、作業割当装置。
【請求項5】
請求項4に記載の作業割当装置であって、
前記目的関数生成部は、前記第1目的関数のパラメータとして含まれている前記作業時間に関連する値として、実行する作業者によって異なる前記作業時間の最大値を用いる、作業割当装置。
【請求項6】
請求項2から請求項5までのいずれか一項に記載の作業割当装置であって、
前記情報取得部は、さらに、前記作業が人の作業者により行われる場合に前記作業が行われる位置である作業位置と、前記作業がロボットの作業者により行われる場合に前記作業を行うために必要な道具をロボットに着脱させるために必要な時間である段替え時間と、を取得し、
前記目的関数生成部は、連続して行われる前記作業の前記作業位置間を作業者である人が移動するために要する時間である移動推定時間と、前記段替え時間とをパラメータとして含む前記第1目的関数を生成する、作業割当装置。
【請求項7】
請求項6に記載の作業割当装置であって、
前記調整部は、前記移動推定時間と、前記段替え時間とをパラメータとして含む前記第2目的関数を最小化する又は最大化する、作業割当装置。
【請求項8】
請求項2から請求項5までのいずれか一項に記載の作業割当装置であって、
前記作業割当部は、混合整数計画法を用いて前記第1目的関数を最小化する又は最大化し、
前記調整部は、混合整数計画法を用いて前記第2目的関数を最小化する又は最大化する、作業割当装置。
【請求項9】
請求項1に記載の作業割当装置であって、
前記情報取得部は、さらに、前記作業が人の作業者により行われる場合に前記作業が行われる作業位置と、異なる前記作業位置を人の作業者が移動する際に要する移動所要時間と、を取得し、
前記目的関数生成部は、前記移動所要時間をパラメータとして含む前記第1目的関数を生成する、作業割当装置。
【請求項10】
請求項9に記載の作業割当装置であって、
前記目的関数生成部は、複数の人の作業者により前記作業が行われる場合に、人の作業者のそれぞれの前記作業時間および前記移動所要時間の合計をパラメータとして含む前記第1目的関数を生成する、作業割当装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業割当装置、作業割当方法、およびコンピュータプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
生産ラインの各工程へ複数の作業を割り当てる作業割当を最適化する方法が知られている(例えば、特許文献1参照)。特許文献1に記載された配置人数決定装置は、予め定められた数のロボットが配置される組立ラインに配置する人の作業者の数を、タクトタイムと、生産ラインとしての組立ラインに配置される人の作業者数およびロボットのコストとを用いて最適化している。特許文献2に記載された実験計画プログラムでは、生命科学等の分野の研究において、実験を行うロボット等の各機器が実験に要する時間が短くなるように、各工程に実験を割り当てている。
【先行技術文献】
【特許文献】
【0003】
特開2018-097801号公報
特開2022-170525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、1つの組立ラインに予め定められた数のロボットが配置される前提で、組立ラインに配置される人の作業者数が最適化される。そのため、複数の組立ラインが存在し、かつ、各組立ラインに配置される人の作業者数に加えてロボットの数を変化させられる場合に、特許文献1に記載された技術では、配置される人の作業者数に加えてロボットの数を最適化することが難しい。
【0005】
特許文献2に記載された技術では、同時に実行される複数の工程に、実験を行う複数の機器を割り当てている。この技術では、複数の工程間で実行される実験の順番が制約として設定され、当該制約を満たす実験計画が策定されている。しかしながら、各工程に割り当てられる機器と、各工程に割り当てられた機器の使用を開始するスケジューリングと、を同時に最適化しようとする場合、順番に関する制約を目的関数などのパラメータとして含ませる必要がある。この場合、最適解を得るための組合せ数は、割当の最適化に関する組合せ数とスケジューリングに関する組合せ数を掛け合わせたものになる。そのため、特許文献2に記載された技術に対して、目的関数のパラメータに順番の制約を含ませて最適化しようとすると、最適化に要する時間が膨大となり、商用ソルバーと用いても実用時間で解ける保証がない。
【0006】
本発明は、上述した課題の少なくとも一部を解決するためになされたものであり、各作業者が行う作業を割り当てる際に、各作業者に対する作業の割り当てと、各作業者が割り当てられた作業を開始する時刻についてのスケジュールとを、要望に応じて適正化することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態として実現できる。
【0008】
(1)本発明の一形態によれば、作業割当装置が提供される。この作業割当装置は、人またはロボットである作業者によって行われる作業を作業者が行う際の作業時間と、作業者が前記作業を行う際の作業コストと、前記作業が人の作業者により行われる場合に前記作業を行った作業者に発生する作業負荷と、の情報を取得する情報取得部と、前記作業時間と、前記作業コストと、前記作業負荷と、の少なくとも1つに関連する値をパラメータとする第1目的関数であって、パラメータのそれぞれに対して乗じる重みを設定した第1目的関数を生成する目的関数生成部と、前記第1目的関数が最小化する又は最大化するように、各作業者が行う前記作業を割り当てる作業割当部と、各作業者が割り当てられた全ての前記作業を完了するまでのそれぞれの作業完了時間に関連する値をパラメータとする第2目的関数を最小化する又は最大化することにより、作業者ごとの前記作業完了時間の内の最大の前記作業完了時間である最大作業完了時間が小さくなるように各作業者が割り当てられた前記作業を始めるそれぞれの作業開始時間を調整する調整部と、を備える。
【0009】
この構成によれば、作業割当部が最小化または最大化する第1目的関数のパラメータとして、作業時間と、作業コストと、作業負荷との少なくとも1つに関連する値が含まれている。第1目的関数では、パラメータのそれぞれに対して乗じる重みが設定されている。そのため、重みがユーザの要望に応じて設定されることにより、作業時間と、作業コストと、作業負荷とのいずれか、又は、これらのバランスを調整して、各作業者に対する作業の割り当てが行われる。作業割当後に、作業完了時間に関連する値をパラメータとする第2目的関数を最小化する又は最大化することにより、作業完了時間が最も遅い作業者の最大作業完了時間が小さくなるように各作業の開始時間が調整される。この結果、ユーザの要望に応じた作業割当が行われた上で、全作業者の作業完了時間が最短になるように各作業者が行う作業を適正化できる。
【0010】
(2)上記態様の作業割当装置において、前記情報取得部は、さらに、複数の前記作業が行われる際の順序の制約である作業順序制約を取得し、前記目的関数生成部は、前記作業順序制約に関連する値をパラメータとして含む前記第1目的関数を生成し、前記調整部は、前記作業完了時間と、前記作業順序制約とのそれぞれに関連する値をパラメータとして含む前記第2目的関数を最小化する又は最大化してもよい。
この構成によれば、作業割当時に適正化される第1目的関数と、作業割当後の調整部による調整により適正化される第2目的関数との両方のパラメータに作業順序制約に関連する値が含まれている。そのため、本構成では、作業割当時に作業順序制約を遵守して適正化した作業割当を行い、かつ、作業順序制約を用いて最大作業完了時間を短くできる。さらに、作業割当と作業順序を同時に最適化する場合に比べて、解を得るための組合せ数を大幅に減らせるため、短時間で最適解を得ることが可能である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
物品給付年金
10日前
個人
非正規コート
1か月前
個人
政治のAI化
5日前
個人
人物再現システム
1か月前
個人
RFタグ読取装置
23日前
個人
在宅介護システム
23日前
個人
AI飲食最適化プラグイン
1か月前
キヤノン株式会社
通信装置
11日前
有限会社ノア
データ読取装置
1か月前
個人
電話管理システム及び管理方法
1か月前
個人
広告提供システムおよびその方法
1か月前
キヤノン株式会社
画像処理装置
3日前
個人
全アルゴリズム対応型プログラム
6日前
大同特殊鋼株式会社
輝線検出方法
5日前
個人
日誌作成支援システム
1か月前
株式会社CROSLAN
支援装置
23日前
シャープ株式会社
電子機器
5日前
ミサワホーム株式会社
宅配ロッカー
2日前
長屋印刷株式会社
画像形成システム
23日前
個人
ポイント還元付き配送システム
1か月前
ミサワホーム株式会社
情報処理装置
10日前
ひびきの電子株式会社
認証システム
25日前
トヨタ自動車株式会社
欠け検査装置
5日前
株式会社アジラ
データ転送システム
5日前
トヨタ自動車株式会社
管理装置
2日前
オムロン株式会社
回転装置及びマウス
27日前
オベック実業株式会社
端末用スタンド
6日前
オベック実業株式会社
接続構造
1か月前
株式会社ユピテル
電子機器及びプログラム等
13日前
ミサワホーム株式会社
荷物搬送システム
2日前
株式会社カプコン
データおよびシステム
4日前
株式会社実身美
ワーキングシェアリングシステム
1か月前
トヨタ自動車株式会社
情報処理装置
9日前
トヨタ自動車株式会社
部品表照合システム
4日前
株式会社デンソーウェーブ
携帯端末
3日前
トヨタ自動車株式会社
更新システム
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ