TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025066542
公報種別
公開特許公報(A)
公開日
2025-04-23
出願番号
2023176225
出願日
2023-10-11
発明の名称
複合現実デバイス、取得システム、処理方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G06T
19/00 20110101AFI20250416BHJP(計算;計数)
要約
【課題】作業効率を向上させることが可能な、複合現実デバイス、処理方法、プログラム、及び記憶媒体を提供する。また、体格のデータを自動的に取得可能な、取得システムを提供する。
【解決手段】実施形態に係る複合現実デバイスは、ねじが回される締結箇所に対応して、前記締結箇所から離れた位置に仮想オブジェクトを表示する。前記複合現実デバイスは、前記締結箇所に対する前記仮想オブジェクトの表示位置を、着用者の体格に応じて変化させる。好ましくは、前記複合現実デバイスは、所定のマーカを認識し、前記マーカを基点として三次元座標系を設定する。前記締結箇所の位置は、前記三次元座標系において予め設定される。
【選択図】図1
特許請求の範囲
【請求項1】
ねじが回される締結箇所に対応して、前記締結箇所から離れた位置に仮想オブジェクトを表示する複合現実デバイスであって、
前記締結箇所に対する前記仮想オブジェクトの表示位置を、着用者の体格に応じて変化させる、複合現実デバイス。
続きを表示(約 1,200 文字)
【請求項2】
前記締結箇所の位置及び予め登録された工具の長さを用いて、前記仮想オブジェクトが表示される高さを変化させる、請求項1に記載の複合現実デバイス。
【請求項3】
前記締結箇所の位置及び予め登録された工具の長さを用いて、前記締結箇所に対して作業可能な第1範囲を算出し、
複合現実デバイスの位置及び前記体格に基づいて、着用者が作業可能な第2範囲を算出し、
前記第1範囲と前記第2範囲が重複する範囲内に、前記仮想オブジェクトを表示する、請求項1に記載の複合現実デバイス。
【請求項4】
ねじが回される締結箇所に対応して、前記締結箇所から離れた位置に仮想オブジェクトを表示する複合現実デバイスであって、
前記締結箇所に対する前記仮想オブジェクトの表示位置を、前記締結箇所と複合現実デバイスとの位置関係に応じて変化させる、複合現実デバイス。
【請求項5】
前記締結箇所に対して複合現実デバイスが第1方向に位置する場合に、前記仮想オブジェクトの前記表示位置を前記第1方向に向けて変化させ、
前記締結箇所に対して複合現実デバイスが前記第1方向と反対の第2方向に位置する場合に、前記仮想オブジェクトの前記表示位置を前記第2方向に向けて変化させる、請求項4に記載の複合現実デバイス。
【請求項6】
ねじが回される締結箇所に対応して、前記締結箇所から離れた位置に仮想オブジェクトを表示する複合現実デバイスであって、
所定の物体が前記仮想オブジェクトに接触した場合に、作業者の手と複合現実デバイスとの間の距離を計測し、
前記距離が着用者の体格に基づいて設定される第1範囲を外れている場合、又は前記複合現実デバイスの傾きが第1閾値を超えている場合に、アラートを表示する、複合現実デバイス。
【請求項7】
所定のマーカを認識し、
前記マーカを基点として三次元座標系を設定し、
前記締結箇所の位置は、前記三次元座標系において予め設定される、請求項1~6のいずれか1つに記載の複合現実デバイス。
【請求項8】
複数の前記締結箇所に対応して、複数の前記仮想オブジェクトをそれぞれ表示し、
前記複数の仮想オブジェクトのそれぞれに、ねじを回す順序を示す情報を表示する、請求項1~6のいずれか1つに記載の複合現実デバイス。
【請求項9】
前記仮想オブジェクトが所定の物体と接触したか判定し、
前記仮想オブジェクトと前記所定の物体とが接触した場合に、前記締結箇所に対してねじが回されていると推定する、請求項1~6のいずれか1つに記載の複合現実デバイス。
【請求項10】
推定された前記締結箇所に関するデータに、作業記録を紐付ける、請求項9に記載の複合現実デバイス。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、複合現実デバイス、取得システム、処理方法、プログラム、及び記憶媒体に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
物品に対する作業において、ねじが回されることがある。ねじを回す作業の効率を高めることができる技術が求められている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/176645号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、作業効率を向上させることが可能な、複合現実デバイス、処理方法、プログラム、及び記憶媒体を提供することである。また、複合現実デバイス、処理方法、プログラム、及び記憶媒体を用いた場合に参照される体格のデータを自動的に取得可能な、取得システムを提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る複合現実デバイスは、ねじが回される締結箇所に対応して、前記締結箇所から離れた位置に仮想オブジェクトを表示する。前記複合現実デバイスは、前記締結箇所に対する前記仮想オブジェクトの表示位置を、着用者の体格に応じて変化させる。
【図面の簡単な説明】
【0006】
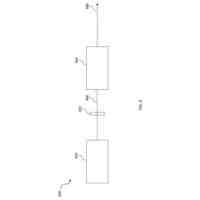
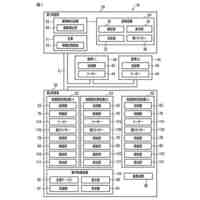
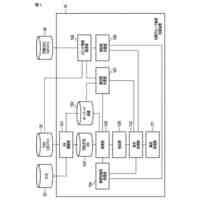
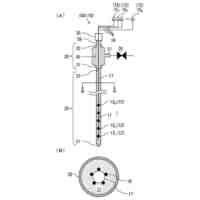
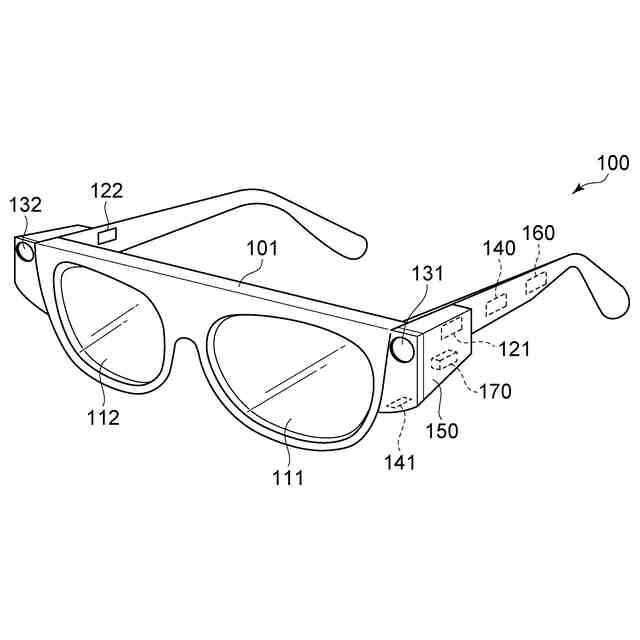
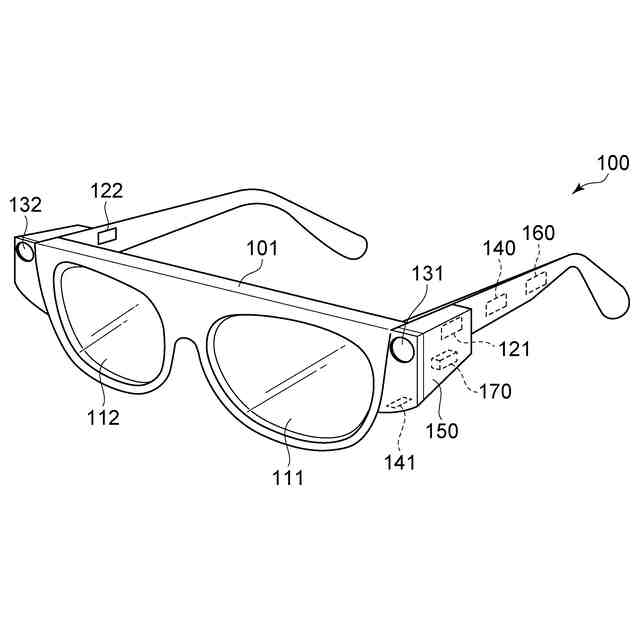
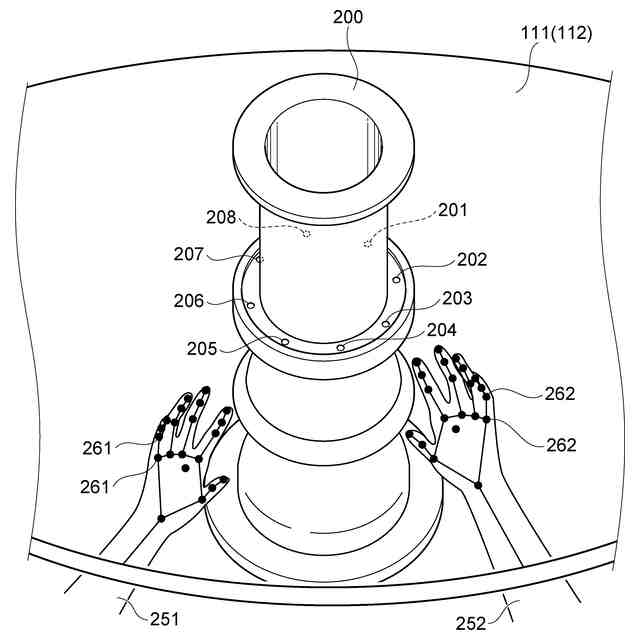
図1は、実施形態に係る複合現実デバイスを例示する模式図である。
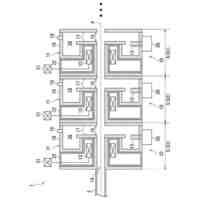
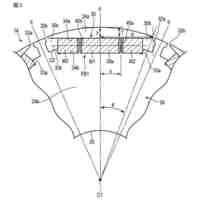
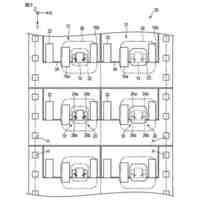
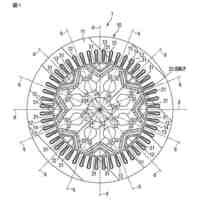
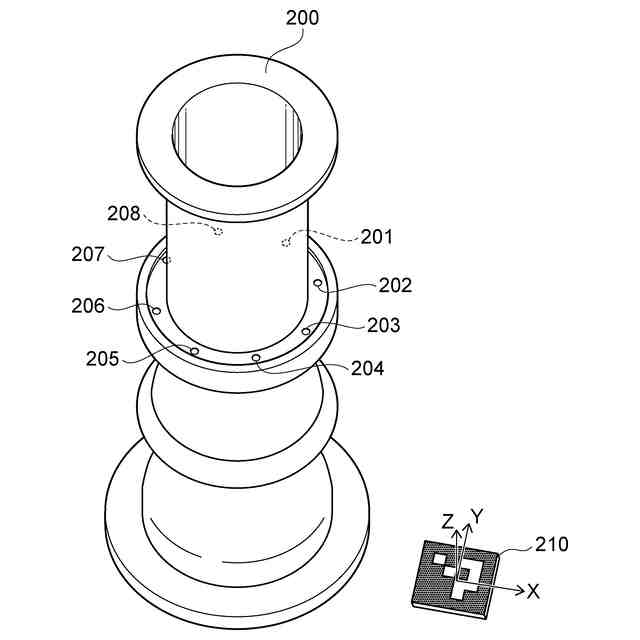
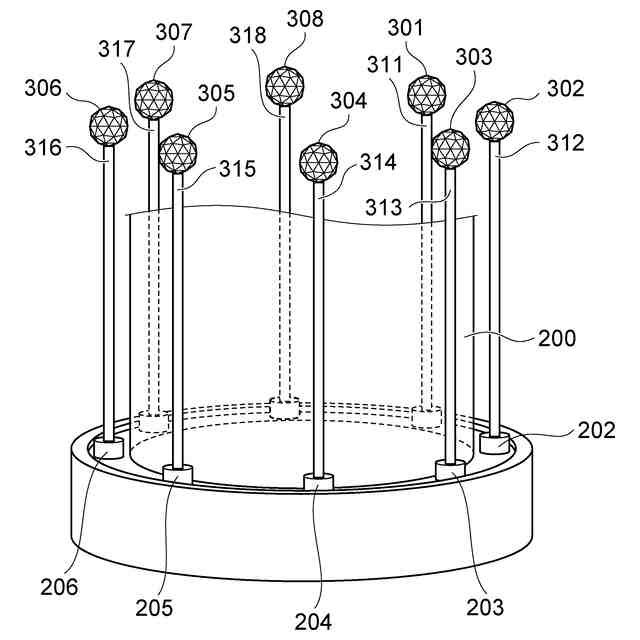
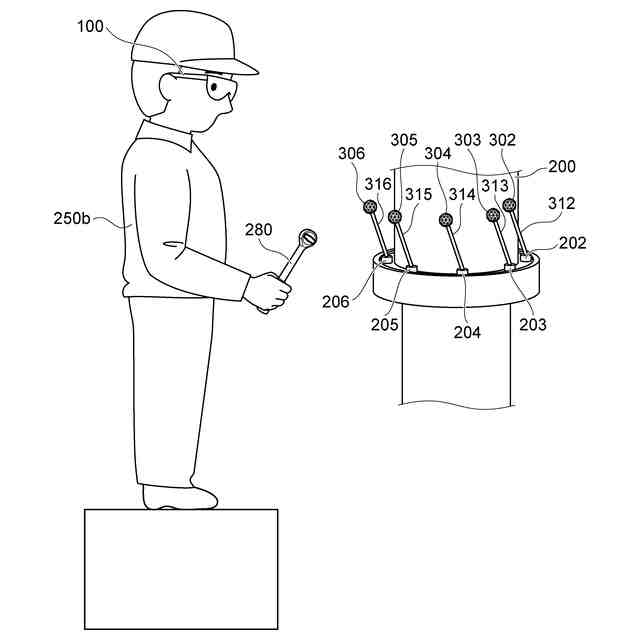
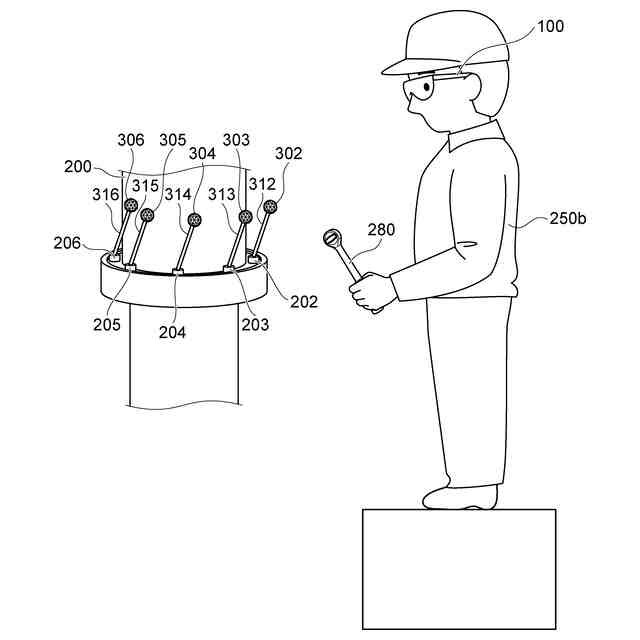
図2は、作業対象の物品を例示する模式図である。
図3は、実施形態に係る処理装置による出力例を示す模式図である。
図4は、実施形態に係る複合現実デバイスによる出力例を示す模式図である。
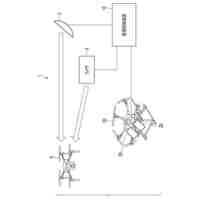
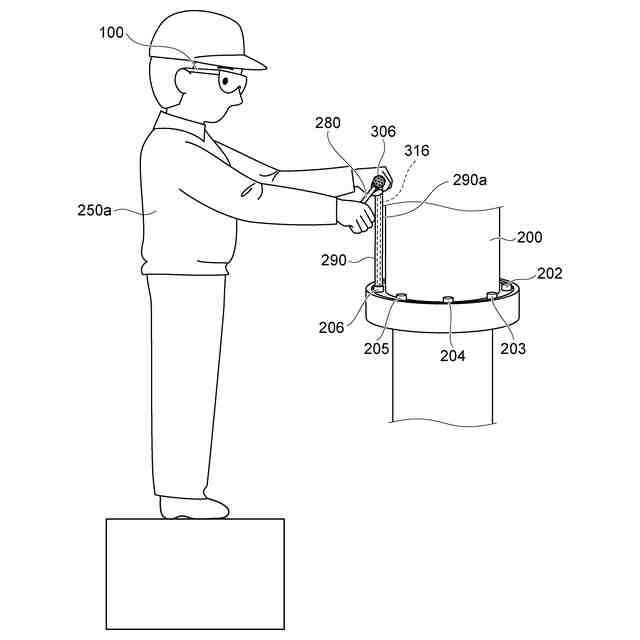
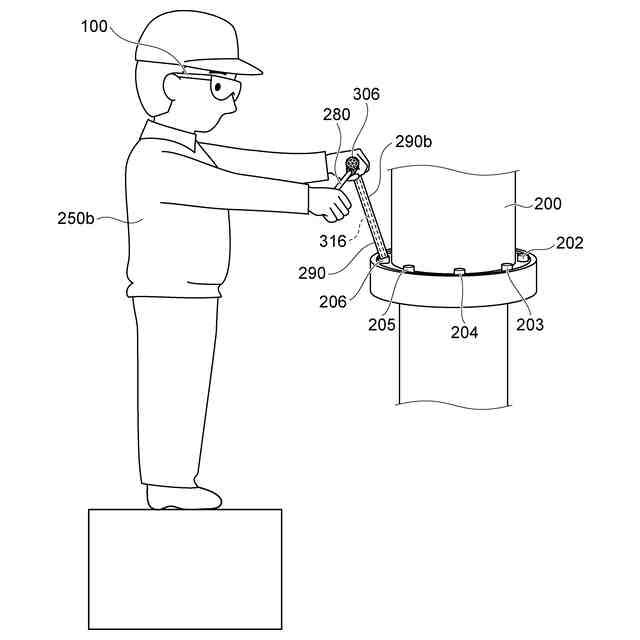
図5は、作業の様子を例示する模式図である。
図6は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図7は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図8は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図9は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図10は、実施形態に係る複合現実デバイスによる処理を説明するための模式図である。
図11は、実施形態に係る複合現実デバイスによる処理を説明するための模式図である。
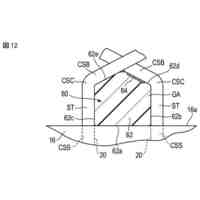
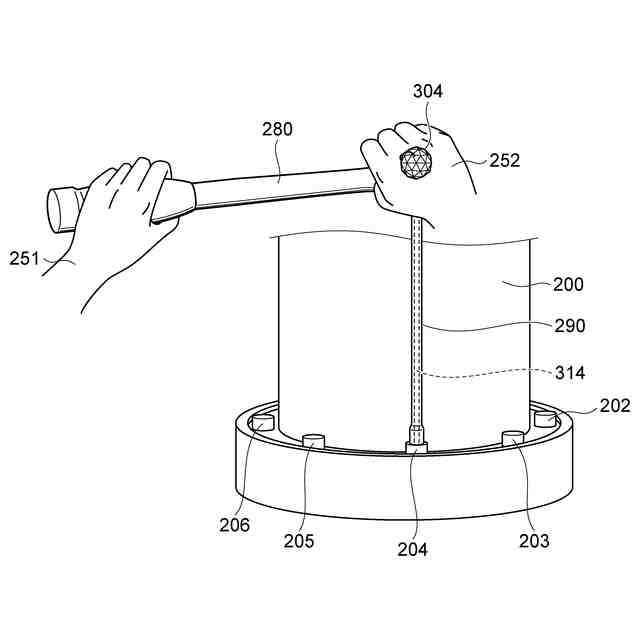
図12は、工具の一例を示す模式図である。
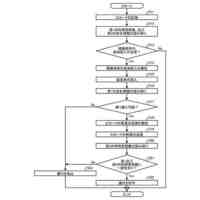
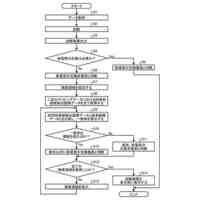
図13は、実施形態に係る処理方法を示すフローチャートである。
図14(a)及び図14(b)は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図15(a)及び図15(b)は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図16(a)及び図16(b)は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図17(a)及び図17(b)は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図18は、実施形態に係る複合現実デバイスによる表示例を説明するための模式図である。
図19は、作業のチェック方法を示すフローチャートである。
図20は、実施形態に係る複合現実デバイスによる表示例を示す模式図である。
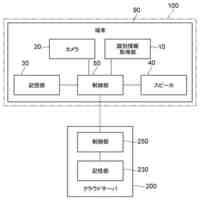
図21は、実施形態に係る取得システムの構成を示す模式図である。
図22は、実施形態の変形例に係る複合現実デバイスによる表示例を示す模式図である。
図23は、実施形態の変形例に係る処理方法を示すフローチャートである。
図24(a)~図24(c)は、実施形態の変形例に係る複合現実デバイスによる表示例を示す模式図である。
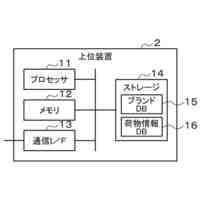
図25は、ハードウェア構成を示す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
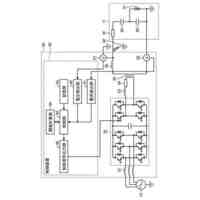
図1は、実施形態に係る複合現実デバイスを例示する模式図である。
本発明の実施形態は、複合現実(MR)デバイスに関する。例えば図1に示すように、実施形態に係るMRデバイス100は、フレーム101、レンズ111、レンズ112、投影装置121、投影装置122、画像カメラ131、深度カメラ132、センサ140、マイク141、処理装置150、バッテリ160、及び記憶装置170を含む。
【0009】
図示した例では、MRデバイス100は、2眼式の頭部装着ディスプレイである。フレーム101には、2つのレンズ111及びレンズ112が嵌め込まれている。投影装置121及び投影装置122は、それぞれ、レンズ111及びレンズ112に情報を投影する。
【0010】
投影装置121及び投影装置122は、レンズ111及びレンズ112に、作業者の身体の認識結果、仮想のオブジェクトなどを表示する。投影装置121及び投影装置122の一方のみが設けられ、レンズ111及びレンズ112の一方にのみ情報が表示されても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
回転電機
今日
株式会社東芝
回転電機
今日
株式会社東芝
回転電機
今日
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
20日前
株式会社東芝
真空バルブ
16日前
株式会社東芝
配線支援装置
1日前
株式会社東芝
情報表示装置
今日
株式会社東芝
光注入同期装置
7日前
株式会社東芝
加速器システム
20日前
株式会社東芝
電子計算機装置
1日前
株式会社東芝
磁気ディスク装置
16日前
株式会社東芝
回転電機の回転子
今日
株式会社東芝
紙葉類処理システム
17日前
株式会社東芝
改札装置、及び改札方法
17日前
株式会社東芝
半導体装置及び製造方法
7日前
株式会社東芝
オゾン発生装置用の電源装置
15日前
株式会社東芝
窒化物構造体及び半導体装置
9日前
株式会社東芝
半導体装置及びその製造方法
20日前
株式会社東芝
半導体装置及びその製造方法
7日前
株式会社東芝
設備内雰囲気監視装置及び方法
16日前
株式会社東芝
無線ICモジュールの製造方法
7日前
株式会社東芝
シールド部材およびタービン動翼
1日前
株式会社東芝
情報管理装置および検査システム
17日前
株式会社東芝
対策グループ編成支援装置及び方法
今日
株式会社東芝
放電管診断装置及び放電管診断方法
今日
株式会社東芝
半導体装置の製造方法及び半導体装置
20日前
株式会社東芝
情報処理装置、方法およびプログラム
今日
株式会社東芝
ドローン捕獲用ドローン、及びシステム
16日前
株式会社東芝
深さ情報取得装置及び深さ情報取得方法
20日前
株式会社東芝
回転子およびその回転子を備えた回転電機
今日
株式会社東芝
回転子およびその回転子を備えた回転電機
今日
株式会社東芝
駅務システム、駅務方法、及びプログラム
20日前
株式会社東芝
ロボットアーム遠隔操作システム及び方法
8日前
株式会社東芝
券売システム、情報提供方法及びプログラム
16日前
株式会社東芝
レーダ装置、信号処理装置及び信号処理方法
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ