TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025063525
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2023172806
出願日
2023-10-04
発明の名称
ロボットアーム遠隔操作システム及び方法
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B25J
3/00 20060101AFI20250409BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームによる遠隔作業の作業性を向上できる。
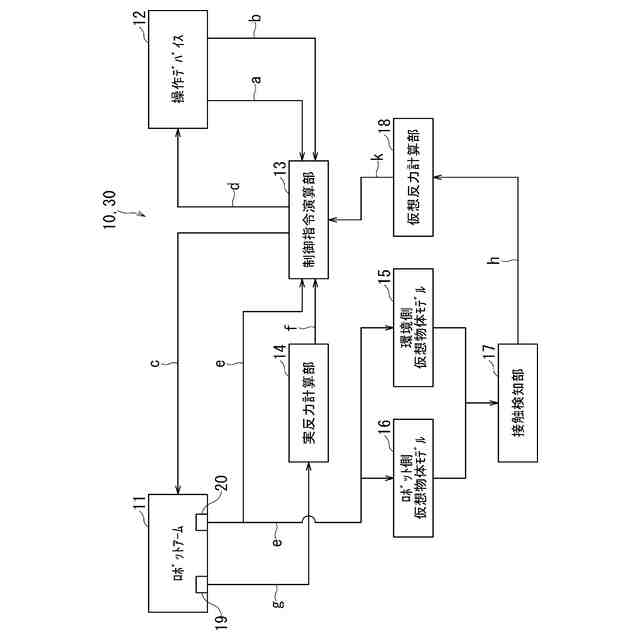
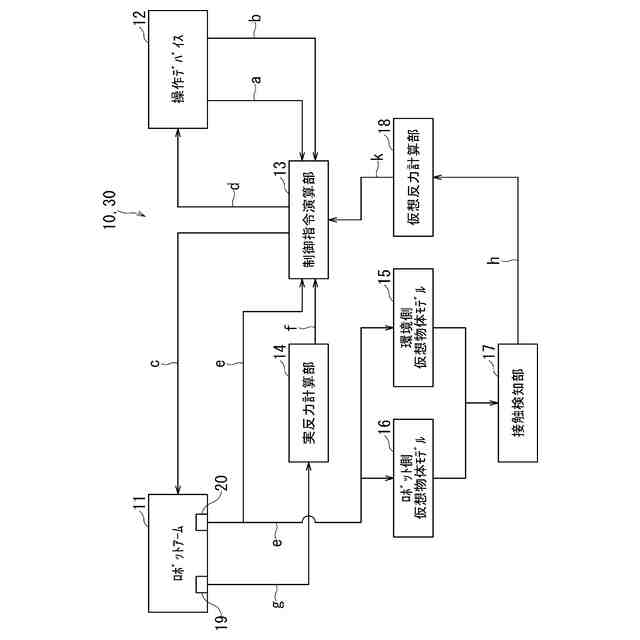
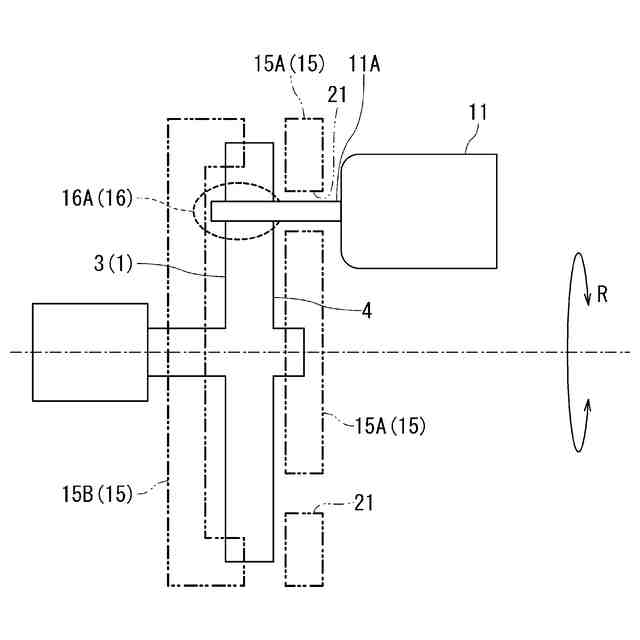
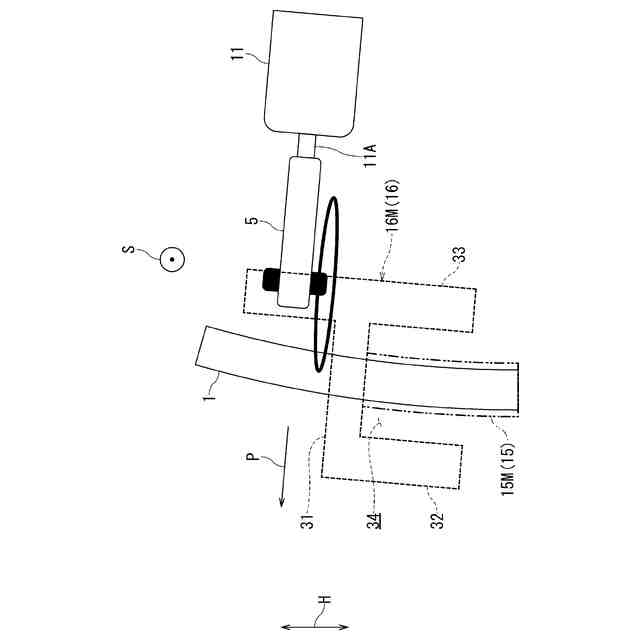
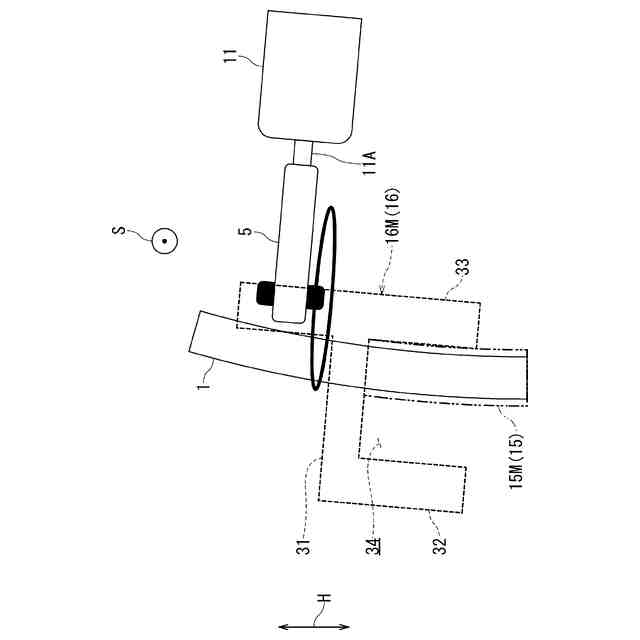
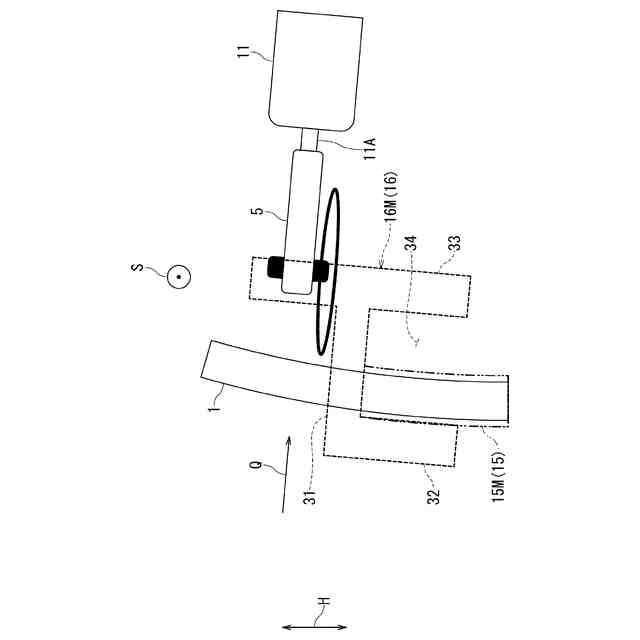
【解決手段】ロボットアーム遠隔操作システム10において、ロボットアーム11の手先の位置等の操作情報を出力する操作デバイス12と、操作デバイスからの操作情報と上記手先の現位置等の実在情報とに基づき上記手先の位置等の制御指令を出力する制御指令演算部13と、作業対象物に対する作業内容に応じた形状の環境側仮想物体モデル15と、作業内容に対応するようにロボットアームに対して形状を定義したロボット側仮想物体モデル16と、ロボットアームの移動に伴う両仮想物体モデルの接触を検知する接触検知部17と、両仮想物体モデルの接触量に基づき仮想的な反力を算出する仮想反力計算部18とを有し、制御指令演算部は、仮想的な反力を操作デバイスのオペレータ側に知覚可能な力として再現させる操作デバイス制御指令を出力し、操作デバイスが操作デバイス制御指令に基づく力をオペレータ側に提示する。
【選択図】図1
特許請求の範囲
【請求項1】
遠隔作業を行うロボットアームの手先の位置及び前記手先に作用する力を、所望の値に誘導して前記手先を遠隔操作するロボットアーム遠隔操作システムにおいて、
前記ロボットアームの前記手先の所望する位置及び所望する前記手先に付与する力から成る操作情報を入力し、前記ロボットアームの前記手先の位置及び前記手先に発生させる力を出力する操作デバイスと、
前記操作デバイスからの前記操作情報と、前記ロボットアームの前記手先の実際の位置及び付与された力に関する実在情報とに基づいて、前記ロボットアームに対して前記手先の位置及び前記手先に付与する力に関する制御指令を出力する制御指令演算部と、
前記作業対象物に対する作業内容に応じた形状に定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられた環境側仮想物体モデルと、
前記作業内容に対応するように前記ロボットアームに対して形状が定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられたロボット側仮想物体モデルと、
前記ロボットアームの移動に伴う前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触を検知する接触検知部と、
前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触量に基づいて、これらの仮想物体モデル間に発生する仮想的な反力を算出する仮想反力計算部と、を有し、
前記制御指令演算部は、前記仮想反力計算部にて算出された前記仮想的な反力を、前記操作デバイスを操作するオペレータ側に知覚可能な力として再現させるための操作デバイス制御指令を出力し、前記操作デバイスが、前記操作デバイス制御指令に基づく前記知覚可能な力を前記オペレータ側に提示するよう構成されたことを特徴とするロボットアーム遠隔操作システム。
続きを表示(約 1,100 文字)
【請求項2】
前記作業対象物とロボットアームの手先との間で前記手先に実際に付与された力に基づいて実反力を算出する実反力計算部を更に有し、
制御指令演算部は、前記実反力計算部にて算出された実反力と、仮想反力計算部にて算出された仮想的な反力とを合算した合算反力に基づく操作デバイス制御指令を出力するよう構成されたことを特徴とする請求項1に記載のロボットアーム遠隔操作システム。
【請求項3】
前記環境側仮想物体モデル及び前記ロボット側仮想物体モデルの少なくとも一方は、ロボットアームの遠隔操作中に作業の進捗に応じて、有効と無効に切替可能に構成されたことを特徴とする請求項1に記載のロボットアーム遠隔操作システム。
【請求項4】
前記環境側仮想物体モデル及び前記ロボット側仮想物体モデルの少なくとも一方は、ロボットアームの遠隔操作中に作業の進捗に応じて、形状の異なる仮想物体モデルに切替可能に構成されたことを特徴とする請求項1に記載のロボットアーム遠隔操作システム。
【請求項5】
遠隔作業を行うロボットアームの手先の位置及び前記手先に作用する力を、所望の値に誘導して前記手先を遠隔操作するロボットアーム遠隔操作方法において、
前記作業対象物に対する作業内容に応じた形状に定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられた環境側仮想物体モデルと、前記作業内容に対応するように前記ロボットアームに対して形状が定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられたロボット側仮想物体モデルと、を準備するステップと、
前記ロボットアームの移動に伴う前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触を接触検知部が検知するステップと、
前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触量に基づいて、これらの仮想物体モデル間に発生する仮想的な反力を仮想反力計算部が算出するステップと、
前記仮想反力計算部にて算出された前記仮想的な反力を、操作デバイスを操作するオペレータ側に知覚可能な力として再現させるための操作デバイス制御指令を制御指令演算部が出力することで、前記操作デバイスが前記操作デバイス制御指令に基づく前記知覚可能な力を前記オペレータ側に提示するステップと、を有することを特徴とするロボットアーム遠隔操作方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態はロボットアーム遠隔操作システム、及びロボットアーム遠隔操作方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
僻地のプラントや発電施設のほか、過酷環境下にある設備等において、省人化や危険作業削減の観点から、人間の代わりにロボットアームを用いて点検やメンテナンスを行うことが求められている。例えば、移動機能とマニピュレータ、カメラ等を備えたロボットをオペレータが遠隔操作して、設備の点検やメンテナンスを行うことが考えられる。
【先行技術文献】
【特許文献】
【0003】
特開平8-25254号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人間がプラントや発電施設で行う点検やメンテナンス作業では、バルブを回す動作や工具を使った加工作業が想定される。これらの作業においては、人間であれば、バルブの駆動部分の摩擦や固着による回しにくさや、加工対象の表面の凸凹、工具からの反力等を感知しながら工具位置や押し付け力を調整し、臨機応変に手先を動かして作業を行っている。
【0005】
これらの作業を遠隔操作ロボットで代替する場合には、人間の手先が感じている前述の硬さや凹凸、反力などをオペレータが検知できる必要がある。その実現手法として、ロボットアームの手先位置をオペレータが操作デバイスを用いて制御し、ロボットアームに作用する作業反力を操作デバイスで再現することでオペレータに知覚させるバイラテラル制御と呼ばれる手法が広く知られている。
【0006】
しかしながら、このように作業反力をオペレータに提示する制御手法を用いたとしても、力の再現方法や精度、通信遅延などにより、人が手で持っている状態と同様の感覚で作業を行うことが難しいという課題がある。また、このような課題があると、ロボット側で動かしたい動作とオペレータ側の操作との間で位置や姿勢、力に乖離が生まれる。この乖離が続くと所定の動作ができなくなり、特に、手先の位置や姿勢の精度が求められる作業が困難になる。また、上記乖離の解消のために、作業対象物の形状や作業対象物との距離を再計測するなどのチェックを行いながら作業を行うと、効率が低下するという課題もある。
【0007】
上述のような乖離状態が発生してもロボットアームの手先の位置や姿勢を所望の状態に誘導できるように、仮想的な壁(以下、仮想ガイド)を設け、ロボットアームの手先と仮想ガイドとの接触反力をオペレータが知覚しながら、ロボットアームの手先を目標位置に操作しやすくする手法が知られている(特許文献1)。ところが、この特許文献1に記載の手法は、ロボットが作業する作業対象物側にのみ仮想ガイドを設置しており、作業対象物へのロボットアームの手先の誘導を目的としている。想定している動作は嵌め合いのような単純な位置決め動作であり、バルブの操作や工具の取り扱いなどは想定しておらず、適用可能な作業種類が少ないことが課題である。
【0008】
本発明の実施形態は、上述の事情を考慮してなされたものであり、ロボットアームを用いた遠隔作業の作業性を向上させることができるロボットアーム遠隔操作システム及びロボットアーム遠隔操作方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の実施形態におけるロボットアーム遠隔操作システムは、遠隔作業を行うロボットアームの手先の位置及び前記手先に作用する力を、所望の値に誘導して前記手先を遠隔操作するロボットアーム遠隔操作システムにおいて、前記ロボットアームの前記手先の所望する位置及び所望する前記手先に付与する力から成る操作情報を入力し、前記ロボットアームの前記手先の位置及び前記手先に発生させる力を出力する操作デバイスと、前記操作デバイスからの前記操作情報と、前記ロボットアームの前記手先の実際の位置及び付与された力に関する実在情報とに基づいて、前記ロボットアームに対して前記手先の位置及び前記手先に付与する力に関する制御指令を出力する制御指令演算部と、前記作業対象物に対する作業内容に応じた形状に定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられた環境側仮想物体モデルと、前記作業内容に対応するように前記ロボットアームに対して形状が定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられたロボット側仮想物体モデルと、前記ロボットアームの移動に伴う前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触を検知する接触検知部と、前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触量に基づいて、これらの仮想物体モデル間に発生する仮想的な反力を算出する仮想反力計算部と、を有し、前記制御指令演算部は、前記仮想反力計算部にて算出された前記仮想的な反力を、前記操作デバイスを操作するオペレータ側に知覚可能な力として再現させるための操作デバイス制御指令を出力し、前記操作デバイスが、前記操作デバイス制御指令に基づく前記知覚可能な力を前記オペレータ側に提示するよう構成されたことを特徴とするものである。
【0010】
また、本発明の実施形態におけるロボットアーム遠隔操作方法は、遠隔作業を行うロボットアームの手先の位置及び前記手先に作用する力を、所望の値に誘導して前記手先を遠隔操作するロボットアーム遠隔操作方法において、前記作業対象物に対する作業内容に応じた形状に定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられた環境側仮想物体モデルと、作業内容に対応するように前記ロボットアームに対して形状が定義され、且つ位置及び姿勢がセンサまたはカメラを含む情報取得機器からの取得情報に基づき実際の位置及び姿勢となるように設定されて、仮想的に設けられたロボット側仮想物体モデルと、を準備するステップと、前記ロボットアームの移動に伴う前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触を接触検知部が検知するステップと、前記環境側仮想物体モデルと前記ロボット側仮想物体モデルとの接触量に基づいて、これらの仮想物体モデル間に発生する仮想的な反力を仮想反力計算部が算出するステップと、前記仮想反力計算部にて算出された前記仮想的な反力を、操作デバイスを操作するオペレータ側に知覚可能な力として再現させるための操作デバイス制御指令を制御指令演算部が出力することで、前記操作デバイスが前記操作デバイス制御指令に基づく前記知覚可能な力を前記オペレータ側に提示するステップと、を有することを特徴とするものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ