TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025045963
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154067
出願日
2023-09-21
発明の名称
進路制御装置および進路制御方法
出願人
株式会社インターネットイニシアティブ
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/36 20060101AFI20250326BHJP(測定;試験)
要約
【課題】より簡易な構成により遠隔で車両の進路制御を行うことを目的とする。
【解決手段】
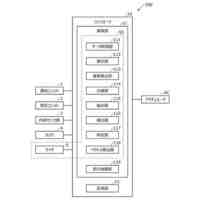
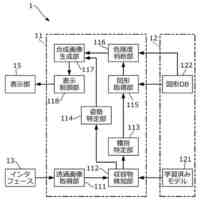
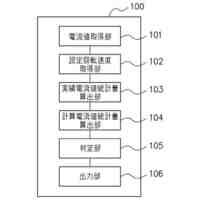
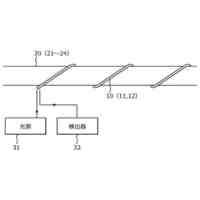
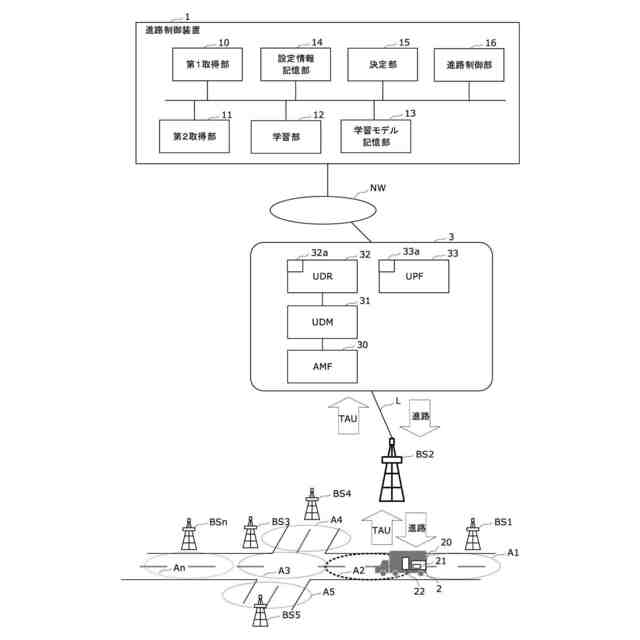
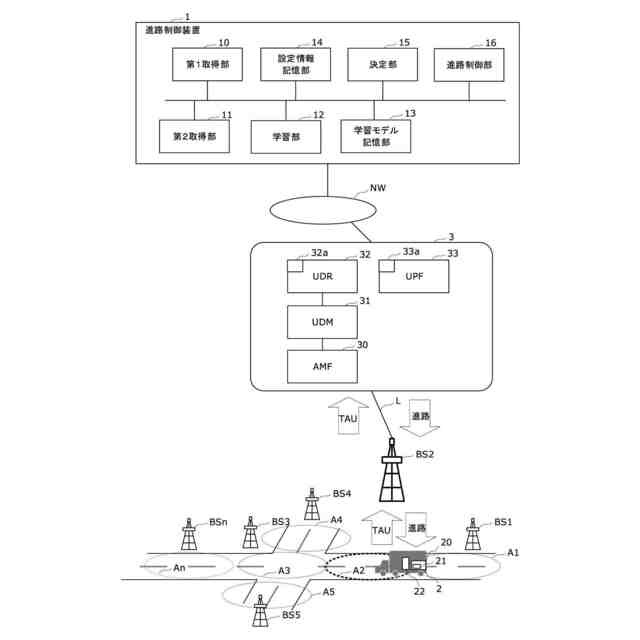
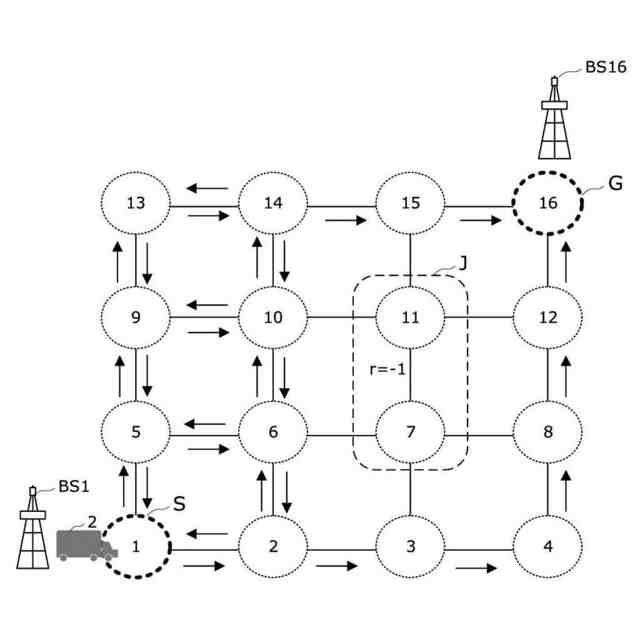
複数の通信エリアA1~Anで規定される車両2の移動空間において、初期地点の通信エリアA1の位置から目的地点の通信エリアAnの位置までの車両2の進路を制御する進路制御装置1であって、通信エリアAを跨いだ際に送信される車両2からの位置登録信号に関連付けられている該通信エリアAの位置を、車両2の現在の位置として取得する第1取得部10と、学習モデルを用いて学習された、車両2が各通信エリアAの位置から順次進むべき進路の方策に基づいて、第1取得部10によって車両2の現在の位置として取得された現在の通信エリアAの位置から、車両2が次に進むべき進路を決定する決定部15と、決定部15によって決定された、車両2が次に進むべき進路を所定の通信規格のコアネットワーク3を介して車両2に指示する進路制御部16とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数の通信エリアで規定される車両の移動空間において、初期地点の通信エリアの位置から目的地点の通信エリアの位置までの前記車両の進路を制御する進路制御装置であって、
通信エリアを跨いだ際に送信される前記車両からの位置登録信号に関連付けられている該通信エリアの位置を、前記車両の現在の位置として取得するように構成された第1取得部と、
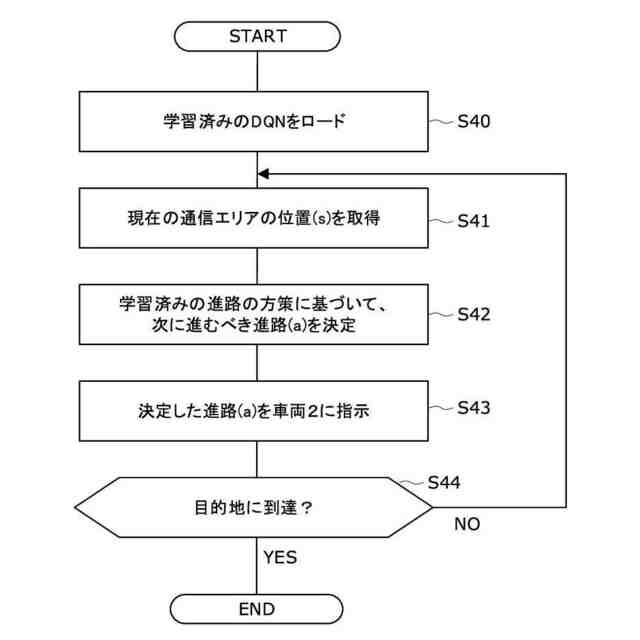
学習モデルを用いて学習された、前記車両が各通信エリアの位置から順次進むべき進路の方策に基づいて、前記第1取得部によって前記車両の前記現在の位置として取得された現在の通信エリアの位置から、前記車両が次に進むべき進路を決定するように構成された決定部と、
前記決定部によって決定された、前記車両が次に進むべき進路を所定の通信規格のコアネットワークを介して前記車両に指示するように構成された進路制御部と
を備える進路制御装置。
続きを表示(約 2,900 文字)
【請求項2】
請求項1に記載の進路制御装置において、
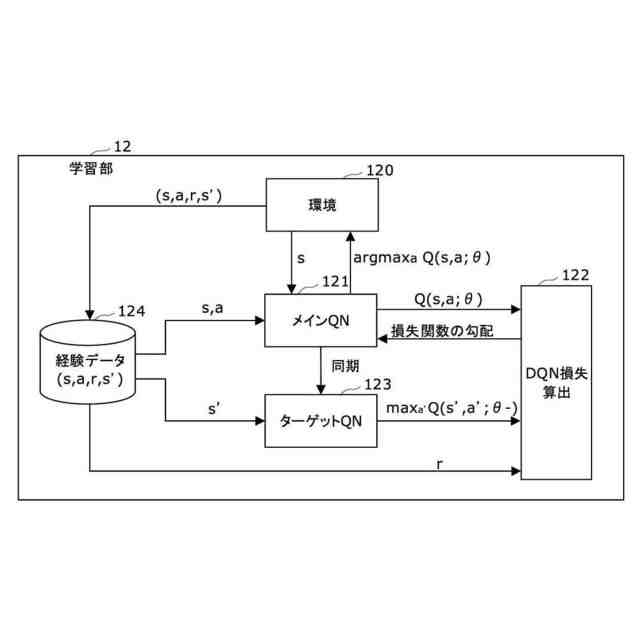
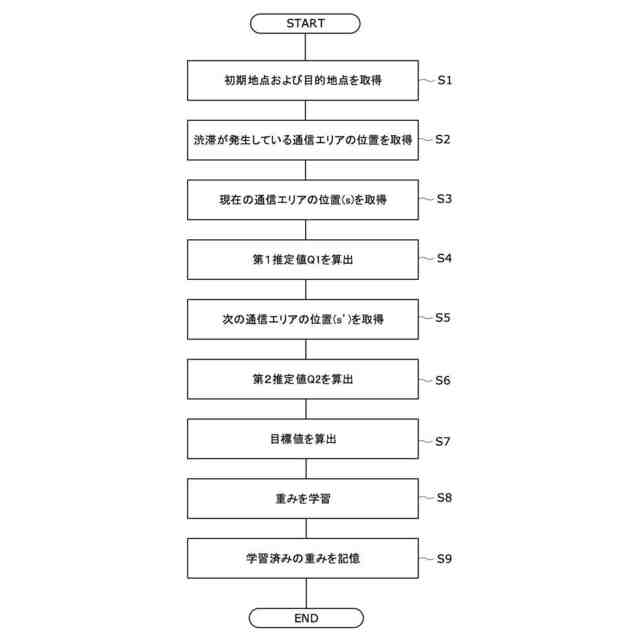
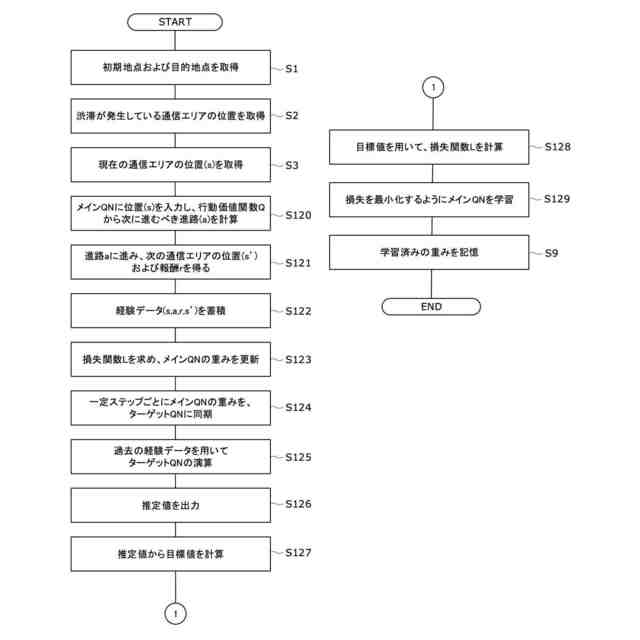
さらに、前記車両が前記初期地点の通信エリアの位置から前記目的地点の通信エリアの位置に到達するまでに、前記車両が前記各通信エリアの位置から順次進むべき進路を計算した推定結果に報酬関数を適用して、前記車両が前記目的地点の通信エリアの位置へ到達するための報酬が最大化するように更新し、前記車両が前記各通信エリアの位置から順次進むべき前記進路の方策を、前記学習モデルを用いて学習するように構成された学習部と、
前記学習部によって学習された、前記進路の方策を記憶するように構成された記憶部と
を備え、
前記決定部は、前記記憶部から前記進路の方策を読み出して、前記車両が次に進むべき進路を決定する
ことを特徴とする進路制御装置。
【請求項3】
請求項2に記載の進路制御装置において、
さらに、前記移動空間において渋滞が発生している領域に対応する通信エリアの位置を取得するように構成された第2取得部と、
前記報酬関数は、前記車両の前記目的地点に係る通信エリアの位置への到達度、および前記渋滞が発生している領域に対応する通信エリアの位置への前記車両の到達度を変数として含む
ことを特徴とする進路制御装置。
【請求項4】
請求項3に記載の進路制御装置において、
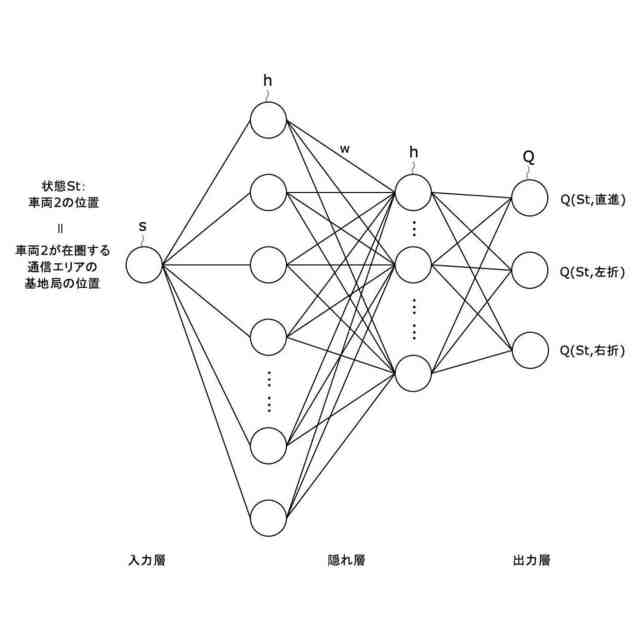
前記学習モデルは、入力層、隠れ層、および出力層を含むニューラルネットワークモデルであり、
前記学習部は、前記現在の通信エリアの位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記車両が前記現在の通信エリアの位置から次に進むべき進路として、右折、左折、および直進を含む各々の行動をとった場合に得られる将来の前記報酬の累積値の期待値を表す行動価値関数の第1推定値を出力し、
前記学習部は、さらに、前記車両が次に到達した通信エリアの位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記行動価値関数の第2推定値を出力し、
前記学習部は、前記第1推定値が、前記第2推定値から計算される目標値となるように、前記ニューラルネットワークモデルの重みパラメータを学習し、
前記記憶部は、学習済みの重みパラメータを記憶する
ことを特徴とする進路制御装置。
【請求項5】
請求項1から4のいずれか1項に記載された進路制御装置において、
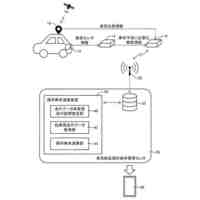
前記第1取得部は、前記コアネットワークに含まれる、加入者情報を管理する統合データリポジトリから、前記車両の前記現在の通信エリアの位置を取得し、
前記進路制御部は、前記コアネットワークに含まれるユーザープレーン機能を介して、前記車両に前記次に進むべき進路に係る指示を送信する
ことを特徴とする進路制御装置。
【請求項6】
複数の通信エリアで規定される車両の移動空間において、初期地点の通信エリアの位置から目的地点の通信エリアの位置までの前記車両の進路を制御するための進路制御方法であって、
通信エリアを跨いだ際に送信される前記車両からの位置登録信号に関連付けられている該通信エリアの位置を、前記車両の現在の位置として取得する第1取得ステップと、
学習モデルを用いて学習された、前記車両が各通信エリアの位置から順次進むべき進路の方策に基づいて、前記第1取得ステップで前記車両の前記現在の位置として取得された現在の通信エリアの位置から、前記車両が次に進むべき進路を決定する決定ステップと、
前記決定ステップで決定された、前記車両が次に進むべき進路を所定の通信規格のコアネットワークを介して前記車両に指示する進路制御ステップと
を備える進路制御方法。
【請求項7】
請求項6に記載の進路制御方法において、
さらに、前記車両が前記初期地点の通信エリアの位置から前記目的地点の通信エリアの位置に到達するまでに、前記車両が前記各通信エリアの位置から順次進むべき進路を計算した推定結果に報酬関数を適用して、前記車両が前記目的地点の通信エリアの位置へ到達するための報酬が最大化するように更新し、前記車両が前記各通信エリアの位置から順次進むべき前記進路の方策を、前記学習モデルを用いて学習するように構成された学習ステップと、
前記学習ステップで学習された、前記進路の方策を記憶部に記憶する記憶ステップと
を備え、
前記決定ステップは、前記記憶部から前記進路の方策を読み出して、前記車両が次に進むべき進路を決定する
ことを特徴とする進路制御方法。
【請求項8】
請求項7に記載の進路制御方法において、
さらに、前記移動空間において渋滞が発生している領域に対応する通信エリアの位置を取得するように構成された第2取得ステップと、
前記報酬関数は、前記車両の前記目的地点に係る通信エリアの位置への到達度、および前記渋滞が発生している領域に対応する通信エリアの位置への前記車両の到達度を変数として含む
ことを特徴とする進路制御方法。
【請求項9】
請求項8に記載の進路制御方法において、
前記学習モデルは、入力層、隠れ層、および出力層を含むニューラルネットワークモデルであり、
前記学習ステップは、前記現在の通信エリアの位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記車両が前記現在の通信エリアから次に進むべき進路として、右折、左折、および直進を含む各々の行動をとった場合に得られる将来の前記報酬の累積値の期待値を表す行動価値関数の第1推定値を出力し、
前記学習ステップは、さらに、前記車両が次に到達した通信エリアの位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記行動価値関数の第2推定値を出力し、
前記学習ステップは、前記第1推定値が、前記第2推定値から計算される目標値となるように、前記ニューラルネットワークモデルの重みパラメータを学習し、
前記記憶ステップは、学習済みの重みパラメータを前記記憶部に記憶する
ことを特徴とする進路制御方法。
【請求項10】
請求項6から9のいずれか1項に記載された進路制御方法において、
前記第1取得ステップは、前記コアネットワークに含まれる、加入者情報を管理する統合データリポジトリから、前記車両の前記現在の通信エリアの位置を取得し、
前記進路制御ステップは、前記コアネットワークに含まれるユーザープレーン機能を介して、前記車両に前記次に進むべき進路に係る指示を送信する
ことを特徴とする進路制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、進路制御装置および進路制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、車両の自動運転における自車位置推定技術として、GPSなどの測位衛星からの信号および、測位衛星からの信号を補完するために車両の挙動を検知する6軸慣性センサ(Inertial Measurement Unit:IMU)や、タイヤの回転数を計測して車両が進んだ距離を計測する走行距離計(Distance Measuring Instrument:DMI)が知られている。
【0003】
車両がトンネル内を走行している場合など通信状態が悪い状況では測位衛星からのGPSの信号が受信できない場合がある。しかし、GPSを補完するために用いられているIMUおよびDMIにおいても、状況によっては自車位置推定精度が十分でない場合がある。例えば、IMUを用いた自車位置推定では誤差が蓄積しやすい欠点がある。DMIを用いた自車位置推定では、車速や車両の向きが変わるときに、計測精度が低下する場合がある。
【0004】
このように、従来の自動運転における自車位置推定では、GPSの測位衛星からの電波の受信状況が悪い場合に、自車位置推定の精度が低下し、自車両の自動運転ECUによって進路や経路の選択を正確に行うことが困難な場合があった。
【0005】
そこで、特許文献1は、GPSおよび地図情報を組み合わせて自動運転の制御を行う場合に、通信遅延が生じた際には、車両がいる地域情報を収集して現在状況地図情報を作成し、設定された目的地点と現在状況地図情報とに基づいて、目的地点までの車両の走行領域の予測演算を行う技術を開示している。
【0006】
しかし、特許文献1が開示する技術では、車両の速度や周辺情報などの様々な情報を収集し地図を生成して車両の走行領域の予測演算を行うため、予測演算が複雑化し、演算負荷が多大となる。
【先行技術文献】
【特許文献】
【0007】
特開2021-111329号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
このように、従来の技術では、より簡易な構成により遠隔で車両の進路制御を行うことができなかった。
【0009】
本発明は、上述した課題を解決するためになされたものであり、より簡易な構成により遠隔で車両の進路制御を行うことを目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するために、本発明に係る進路制御装置は、複数の通信エリアで規定される車両の移動空間において、初期地点の通信エリアの位置から目的地点の通信エリアの位置までの前記車両の進路を制御する進路制御装置であって、通信エリアを跨いだ際に送信される、前記車両からの位置登録信号に関連付けられている該通信エリアの位置を、前記車両の現在の位置として取得するように構成された第1取得部と、学習モデルを用いて学習された、前記車両が各通信エリアの位置から順次進むべき進路の方策に基づいて、前記第1取得部によって前記車両の前記現在の位置として取得された現在の通信エリアの位置から、前記車両が次に進むべき進路を決定するように構成された決定部と、前記決定部によって決定された、前記車両が次に進むべき進路を所定の通信規格のコアネットワークを介して前記車両に指示するように構成された進路制御部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
2日前
東レ株式会社
シート状物の検査方法
今日
東ソー株式会社
自動分析装置及び方法
2日前
富士電機株式会社
エンコーダ
今日
TDK株式会社
温度センサ
今日
株式会社ヨコオ
シートコンタクタ
2日前
本田技研工業株式会社
物体検出装置
5日前
本田技研工業株式会社
物体検出装置
5日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
セイコーエプソン株式会社
干渉計
2日前
TDK株式会社
センサ
今日
内山工業株式会社
分析装置用部材
1日前
日本信号株式会社
表示装置
今日
日東建設株式会社
ボルト・ナットの健全性検査装置
5日前
株式会社SUBARU
蓄電池の状態センサ装置
2日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
5日前
国立大学法人 東京大学
粘性の測定装置及び方法
1日前
大成建設株式会社
地震動解析システム
今日
日本製鉄株式会社
回転機械の異常診断支援方法及び装置
今日
株式会社キーエンス
レベル計
5日前
倉敷化工株式会社
動特性測定装置
5日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
個人
位置決め具及び位置決め具付きコンベックスルール
5日前
株式会社キーエンス
レベル計
5日前
株式会社アイシン
乗員検知装置
2日前
国立大学法人島根大学
検査方法及び検査装置
今日
日本特殊陶業株式会社
ガスセンサ
今日
SWCC株式会社
温度測定方法
5日前
日本特殊陶業株式会社
ガスセンサ
今日
トヨタ自動車株式会社
車両部品の残存寿命予測装置
今日
株式会社エヌテック
物品検査装置及び物品検査方法
今日
株式会社デンソーウェーブ
歪ゲージの取付方法
今日
株式会社メック
欠陥検査装置及び欠陥検査方法
1日前
ヒロセ電機株式会社
磁気センサおよび磁気センサ装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ