TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044033
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151709
出願日
2023-09-19
発明の名称
モータ制御装置
出願人
日立Astemo株式会社
代理人
弁理士法人開知
主分類
H02P
21/05 20060101AFI20250325BHJP(電力の発電,変換,配電)
要約
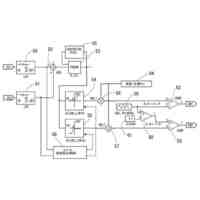
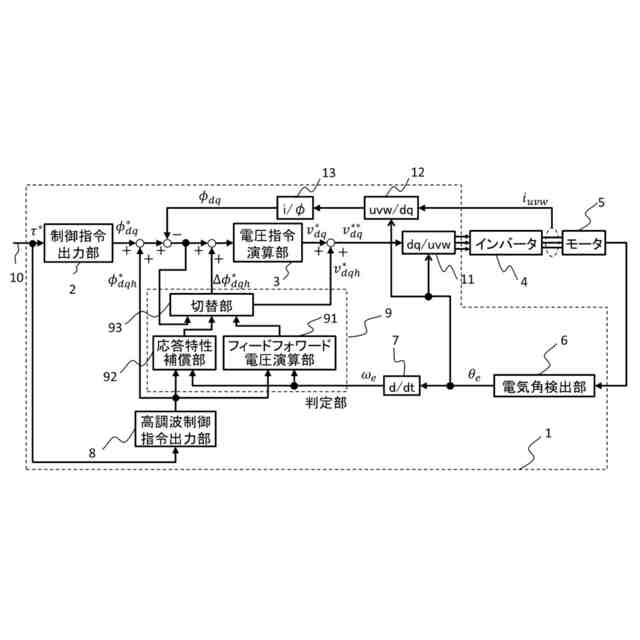
【課題】FFとFBの干渉を回避しつつトルクリプルの抑制精度を広い回転数領域に対して維持できるモータ制御装置を提供する。
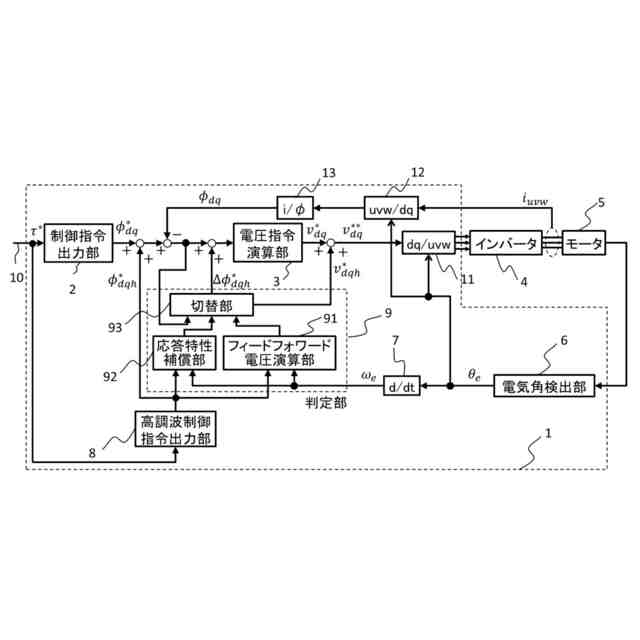
【解決手段】プロセッサはトルク指令値10(τ*)から高調波制御指令値(φ*
dqh
)を決定する(高調波制御指令出力部8)。プロセッサは高調波制御指令値と電気角速度(ω
e
)から応答特性補償値(Δφ*
dqh
)を決定する(応答特性補償部92)。プロセッサは高調波制御指令値と電気角速度からフィードフォワード電圧指令値を決定する(フィードフォワード電圧演算部91)。プロセッサはトルク指令値10に対応する制御指令値(φ*
dq
)と高調波制御指令値とに基づいて電圧指令値(v*
dq
)を決定する(電圧指令演算部3)。プロセッサは切替条件によって電圧指令値にフィードフォワード電圧指令値(v*dqh)を重畳する第1制御と応答特性補償値で高調波制御指令値を補償する第2制御とを切り替える(切替部93)。
【選択図】図1
特許請求の範囲
【請求項1】
モータをインバータにより駆動するモータ制御装置であって、
トルク指令値から高調波制御指令値を決定し、
前記高調波制御指令値と電気角速度から応答特性補償値を決定し、
前記高調波制御指令値と前記電気角速度からフィードフォワード電圧指令値を決定し、
前記トルク指令値に対応する制御指令値と前記高調波制御指令値とに基づいて電圧指令値を決定し、
切替条件によって、前記電圧指令値に前記フィードフォワード電圧指令値を重畳する第1制御と、前記応答特性補償値で前記高調波制御指令値を補償する第2制御と、を切り替えるプロセッサを備えるモータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記電圧指令値の高調波成分と前記フィードフォワード電圧指令値との差によって、前記第1制御と前記第2制御とを切り替える
ことを特徴とするモータ制御装置。
【請求項3】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記高調波制御指令値と同じ物理量の計測制御量と前記高調波制御指令値との差によって、前記第1制御と前記第2制御とを切り替える
ことを特徴とするモータ制御装置。
【請求項4】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記電気角速度によって、前記第1制御と前記第2制御とを切り替える
ことを特徴とするモータ制御装置。
【請求項5】
請求項1に記載のモータ制御装置であって、
前記切替条件は、ヒステリシス特性を有する
ことを特徴とするモータ制御装置。
【請求項6】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記高調波制御指令値に複数の周波数成分が含まれる場合、前記高調波制御指令値に含まれる周波数成分ごとに、前記第1制御と前記第2制御とを切り替える
ことを特徴とするモータ制御装置。
【請求項7】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記第2制御において前記応答特性補償値で前記高調波制御指令値にゲイン補償と位相補償を施す
ことを特徴とするモータ制御装置。
【請求項8】
請求項1に記載のモータ制御装置であって、
前記制御指令値と前記高調波制御指令値の物理量は、磁束又は電流である
ことを特徴とするモータ制御装置。
【請求項9】
請求項1に記載のモータ制御装置であって、
前記制御指令値は、トルク指令値に対応するトルクを前記モータに出力させる磁束指令値であり、
前記高調波制御指令値は、トルクリプルと逆位相のトルクを前記モータに発生させる磁束指令値であり、
前記プロセッサは、
前記高調波制御指令値を重畳した前記制御指令値と計測磁束値との差に前記応答特性補償値を加算した値から決定される前記電圧指令値の高調波成分と、前記フィードフォワード電圧指令値と、の差によって、前記第1制御と前記第2制御とを切り替える
ことを特徴とするモータ制御装置。
【請求項10】
請求項1に記載のモータ制御装置であって、
前記プロセッサは、
前記制御指令値と計測制御量が一致するように前記電圧指令値を決定する
ことを特徴とするモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自動車などの積載スペースが限られるアプリケーションで利用するためモータの高出力密度化が進行している。これにより磁気飽和が発生する領域でモータを利用することが増えている。磁気飽和領域では、トルクリプルが増え振動や騒音を誘発するため、特にトルクリプル抑制制御が必要とされている。
【0003】
トルクリプル抑制制御では、発生するトルクリプルと逆位相のトルクを発生させる電流高調波を流すことが行われる。そのために、高調波電流指令値からインバータの必要出力電圧をフィードフォワード(FF)で計算する。このとき、高調波電流指令値から必要な電圧指令を計算するにはモータの逆モデルが必要であり、高調波電流の実現精度は、モータの逆モデルの精度によって決まる。例えば、特許文献1で用いられる逆モデルはモータのインダクタンスと抵抗、誘起電圧の影響を考慮し、高調波電流指令値から電圧指令値を求める。
【0004】
逆モデルを用いた高調波電流の実現は逆モデルのパラメータ調整に時間がかかるため、モータ逆モデルで使用するパラメータを一部省略することがある。この場合でも、高調波の周波数が一定以上であればほとんど誤差が出ない。そこで、高速域はFFによって、また、低速域では電流指令値に高調波電流指令値を重畳し電流FB(フィードバック)によって、必要な電流高調波を実現する。
【先行技術文献】
【特許文献】
【0005】
特許第5574790号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
パラメータを省略したモータ逆モデルから計算するフィードフォワード電圧の誤差が十分小さくなるしきい値周波数よりもFBの制御帯域が低い場合、FFもFBのいずれでも精度が出ない領域が発生する。これを防ぐためにFB制御の応答特性に相当する位相と振幅を修正した高調波指令値を重畳することでしきい値周波数まで、FB制御の帯域を透過的に拡張できる。ところが、これらのFFとFBを同時に重畳してトルクリプルを抑制しようとすると両者が干渉してしまいトルクリプルを抑制できなくなる。
【0007】
本発明の目的は、フィードフォワードとフィードバックの干渉を回避しつつトルクリプルの抑制精度を広い回転数領域に対して維持できるモータ制御装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、モータをインバータにより駆動するモータ制御装置であって、トルク指令値から高調波制御指令値を決定し、前記高調波制御指令値と電気角速度から応答特性補償値を決定し、前記高調波制御指令値と前記電気角速度からフィードフォワード電圧指令値を決定し、前記トルク指令値に対応する制御指令値と前記高調波制御指令値とに基づいて電圧指令値を決定し、切替条件によって、前記電圧指令値に前記フィードフォワード電圧指令値を重畳する第1制御と、前記応答特性補償値で前記高調波制御指令値を補償する第2制御と、を切り替えるプロセッサを備える。
【発明の効果】
【0009】
本発明によれば、フィードフォワードとフィードバックの干渉を回避しつつトルクリプルの抑制精度を広い回転数領域に対して維持できる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
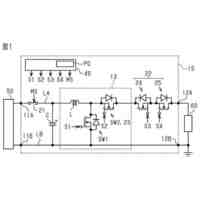
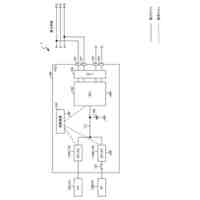
本発明の実施例1に係るモータの制御装置の概略ブロック図である。
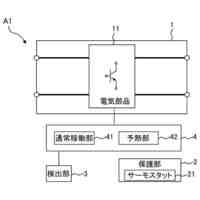
本発明の実施例1に係る切替部の概略ブロック図である。
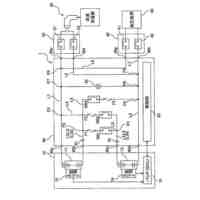
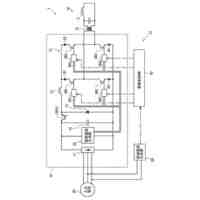
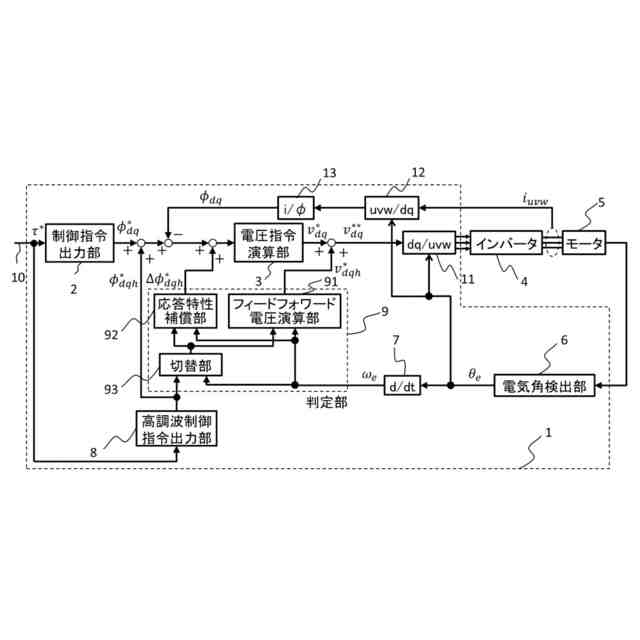
本発明の実施例2に係るモータの制御装置の概略ブロック図である。
本発明の実施例2に係る切替部の概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ファスナー式コード束ね
1日前
ニチコン株式会社
電力変換装置
6日前
個人
回転電気装置及び発電装置
2日前
矢崎総業株式会社
配電装置
6日前
株式会社ダイヘン
電気機器
7日前
株式会社豊田自動織機
回転電機のロータ
1日前
ミネベアミツミ株式会社
回転機器
6日前
株式会社コスメック
自立発電装置
2日前
鹿島建設株式会社
分電盤の配置構造
8日前
富士電機株式会社
電力変換装置
8日前
富士電機株式会社
電力変換装置
8日前
日産自動車株式会社
インバータ
6日前
富士電機株式会社
電力変換装置
8日前
富士電機株式会社
電力変換装置
8日前
富士電機株式会社
電力変換装置
8日前
株式会社ダイヘン
蓄電池システム
7日前
高周波熱錬株式会社
電源装置
1日前
高周波熱錬株式会社
電源装置
1日前
日新イオン機器株式会社
駆動装置および真空装置
8日前
矢崎総業株式会社
グロメット
7日前
ニデック株式会社
ステータ、モータ及びドローン
1日前
株式会社村田製作所
電源装置及びプログラム
2日前
豊田合成株式会社
太陽光発電給電装置
2日前
株式会社力電
励磁突入電流の抑制回路システム
1日前
株式会社アイシン
バッテリケース
2日前
株式会社アイシン
車両用駆動装置
1日前
TOTO株式会社
無線送電システム
6日前
株式会社東芝
磁性楔及び回転電機
7日前
京セラ株式会社
電力変換装置
7日前
シンフォニアテクノロジー株式会社
電力変換装置
2日前
株式会社東芝
回転電機
8日前
株式会社東芝
回転電機
8日前
個人
蓄電池システム
8日前
株式会社東芝
回転電機
8日前
トヨタ自動車株式会社
充電システム及び充電方法
7日前
株式会社ミツバ
ロータ製造方法及びロータ製造装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ