TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042819
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149969
出願日
2023-09-15
発明の名称
入力モジュールの試験方法、出力モジュールの試験方法、試験用出力モジュール、試験用入力モジュール、入力モジュールの試験システム、および出力モジュールの試験システム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
23/02 20060101AFI20250321BHJP(制御;調整)
要約
【課題】制御システムの試験をリアルタイムで、かつ自動的に行うことができる入力モジュールの試験方法、出力モジュールの試験方法を提供することにある。
【解決手段】入力モジュールの試験方法は、前記入力モジュールが試験信号を出力するステップと、前記信号発生器が前記試験信号に応じたアナログ入力信号を出力するステップと、前記入力モジュールが前記アナログ入力信号をデジタル信号に変換した状態信号を出力するステップと、前記制御装置が前記信号発生器から出力された前記状態信号を、制御信号として出力するステップと、前記試験用出力モジュールが前記制御装置から出力された前記制御信号を出力するステップと、前記テストPCが前記試験用出力モジュールから出力された前記制御信号と、前記試験信号とを比較して、前記入力モジュールの健全性を評価するステップと、を有する。
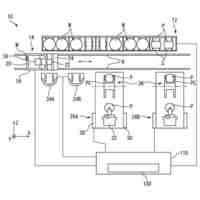
【選択図】図5
特許請求の範囲
【請求項1】
制御対象を制御する制御装置と、前記制御装置に前記制御対象の信号を出力する入力モジュールと、を備える制御システムの入力モジュールの試験方法であって、
テストPCが、試験信号を信号発生器に出力するステップと、
前記信号発生器が、前記テストPCから出力された前記試験信号に応じたアナログ入力信号を前記入力モジュールに出力するステップと、
前記入力モジュールが、前記信号発生器から出力された前記アナログ入力信号をデジタル信号に変換した状態信号を、前記制御装置に出力するステップと、
前記制御装置が、前記入力モジュールから出力された前記状態信号を、制御信号として、前記制御装置に接続された試験用出力モジュールに出力するステップと、
前記試験用出力モジュールが、前記制御装置から出力された前記制御信号を前記テストPCに出力するステップと、
前記テストPCが、前記試験用出力モジュールから出力された前記制御信号と、前記試験信号とを比較して、前記入力モジュールの健全性を評価するステップと、
を有する入力モジュールの試験方法。
続きを表示(約 1,900 文字)
【請求項2】
前記テストPCは、予め設定されたテストデータファイルに基づいて、複数の前記試験信号を自動的に生成して出力する、
請求項1に記載の入力モジュールの試験方法。
【請求項3】
制御対象を制御する制御装置と、前記制御装置の信号を前記制御対象へ出力する出力モジュールと、を備える制御システムの出力モジュールの試験方法であって、
テストPCが、試験信号を前記制御装置に接続された試験用入力モジュールに出力するステップと、
前記試験用入力モジュールが、前記試験信号を前記制御装置に出力するステップと、
前記制御装置が、前記試験用入力モジュールから出力された前記試験信号を制御信号として前記出力モジュールに出力するステップと、
前記出力モジュールが、前記制御装置から出力された前記制御信号をアナログ信号に変換したアナログ出力信号を、前記出力モジュールに接続された計測器に出力するステップと、
前記計測器が、前記出力モジュールから出力された前記アナログ出力信号を計測し、前記アナログ出力信号の計測値を前記テストPCに出力するステップと、
前記テストPCが、前記計測器から出力された前記アナログ出力信号の前記計測値と、前記試験信号とを比較して、前記出力モジュールの健全性を評価するステップと、
を有する出力モジュールの試験方法。
【請求項4】
前記テストPCは、予め設定されたテストデータファイルに基づいて、複数の前記試験信号を自動的に生成して出力する、
請求項3に記載の出力モジュールの試験方法。
【請求項5】
制御装置に制御対象の信号を出力する入力モジュールの試験時に前記制御装置に接続される試験用出力モジュールであって、
前記入力モジュールが試験用に入力されたアナログ入力信号をデジタル信号に変換した状態信号であって、前記入力モジュールが前記制御装置に出力した前記状態信号を、前記制御装置から取得する上位通信部と、
取得した前記状態信号を前記入力モジュールの試験結果としてテストPCに送信するシリアル通信部と、
を備える試験用出力モジュール。
【請求項6】
制御装置の信号を制御対象に出力する出力モジュールの試験時に前記制御装置に接続される試験用入力モジュールであって、
テストPCから試験信号を取得するシリアル通信部と、
前記試験信号を前記制御装置に送信する上位通信部と、
を備える試験用入力モジュール。
【請求項7】
試験信号を出力するテストPCと、
前記テストPCから出力された前記試験信号に応じたアナログ入力信号を出力する信号発生器と、
前記信号発生器から出力された前記アナログ入力信号をデジタル信号に変換した状態信号を出力する入力モジュールと、
前記入力モジュールから出力された前記状態信号を制御信号として出力する制御装置と、
前記制御装置から出力された前記制御信号を前記テストPCに出力する試験用出力モジュールと、
を備え、
前記テストPCは、前記試験用出力モジュールから出力された前記制御信号と、前記試験信号とを比較して、前記入力モジュールの健全性を評価する、
入力モジュールの試験システム。
【請求項8】
前記テストPCは、予め設定されたテストデータファイルに基づいて、複数の前記試験信号を自動的に生成して出力する、
請求項7に記載の入力モジュールの試験システム。
【請求項9】
試験信号を出力するテストPCと、
前記テストPCから出力された前記試験信号を出力する試験用入力モジュールと、
前記試験用入力モジュールから出力された前記試験信号を制御信号として出力する制御装置と、
前記制御装置から出力された前記制御信号をアナログ出力信号に変換して出力する出力モジュールと、
前記出力モジュールから出力された前記アナログ出力信号を計測し、前記アナログ出力信号の計測値を前記テストPCに出力する計測器と、
を備え、
前記テストPCは、前記計測器から出力された前記アナログ出力信号の前記計測値と、前記試験信号とを比較して、前記出力モジュールの健全性を評価する、
出力モジュールの試験システム。
【請求項10】
前記テストPCは、予め設定されたテストデータファイルに基づいて、複数の前記試験信号を自動的に生成して出力する、
請求項9に記載の出力モジュールの試験システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、入力モジュールの試験方法、出力モジュールの試験方法、試験用出力モジュール、試験用入力モジュール、入力モジュールの試験システム、および出力モジュールの試験システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
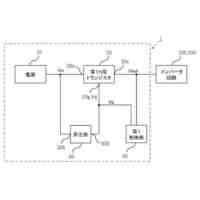
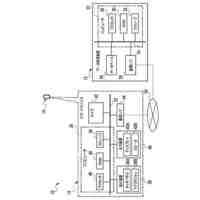
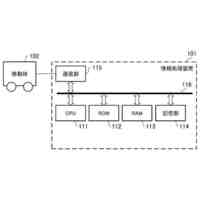
プラントの制御システムは、制御装置と、入出力モジュールと、上位装置とを備える。制御装置は、プラントの状態を示す状態信号や、上位装置より指定された制御ロジックや指令値などに基づいて、プラントの各機器を制御するための制御信号を演算して出力する。入出力モジュールは、プラントの各機器から取得したプラントの状態を示すアナログ信号をデジタル信号に変換して制御装置に入力する入力モジュールと、制御装置が演算した制御信号をアナログ信号に変換してプラントの各機器に出力する出力モジュールとを含む。上位装置は、たとえば操作者(プラントの管理者など)が制御ロジックの変更を行う制御用PCや、制御装置に入出力される状態信号および制御信号を取得して、操作者がプラントの監視や指令値の変更を行うための操作用PCを含む。
【0003】
制御装置がプラントを精度よく制御するためには、入出力モジュールが適正に動作している必要がある。たとえば、特許文献1には、入力モジュールの出荷前や、出荷後の任意のタイミングなどで試験を行い、入力モジュールの設定値やゲインなどを調整することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-20603号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の手法では、たとえば入力モジュールの試験を自動化して行う場合、操作用PCは、操作者の操作内容を記憶するRPA(Robotic Process Automation)ツールなどを利用して、予め操作者が記憶させた操作内容に基づいて、入力モジュールに試験信号を出力する。そうすると、入力モジュールは、試験信号を制御装置に出力する。また、操作用PCは、入力モジュールが制御装置に出力した信号を、制御装置から取得して表示する。操作者は、入力モジュールに出力した試験信号と、入力モジュールが制御装置に出力した信号(試験結果)とを比較して、入力モジュールが適正に動作しているか評価する。
【0006】
入力モジュールと制御装置との間の信号の送受信は、たとえばXマイクロ秒~Xミリ秒単位のごく短い周期で行われる。一方、操作用PCと制御装置との間の信号の送受信は、それよりも長い1秒ごとなどの周期で行われる。つまり、操作用PCを用いた従来の試験方法では、入力モジュールが制御装置へ出力した信号をリアルタイムで、すなわち、入力モジュールと制御装置との間の通信周期に同期して監視することができない。そうすると、入力モジュールと制御装置との間の試験信号の通信周期と、操作用PCが制御装置から試験信号(試験結果)を取得する周期とが不一致となることから、操作用PCで自動的に試験信号と試験結果とを対応づけて比較し、評価を行うことは困難である。このため、従来の手法では、操作者が試験信号と試験結果とを目視で確認して評価する必要があった。
【0007】
また、操作用PCの操作画面(GUIなど)は、プラントや制御システムごとに異なる場合がある。そうすると、RPAツールを利用して試験を自動化する従来の手法では、異なるプラントや制御システムに適用することが困難である。
【0008】
本開示の目的は、制御システムの試験をリアルタイムで、かつ自動的に行うことができる入力モジュールの試験方法、出力モジュールの試験方法、試験用出力モジュール、試験用入力モジュール、入力モジュールの試験システム、および出力モジュールの試験システムを提供することにある。
【課題を解決するための手段】
【0009】
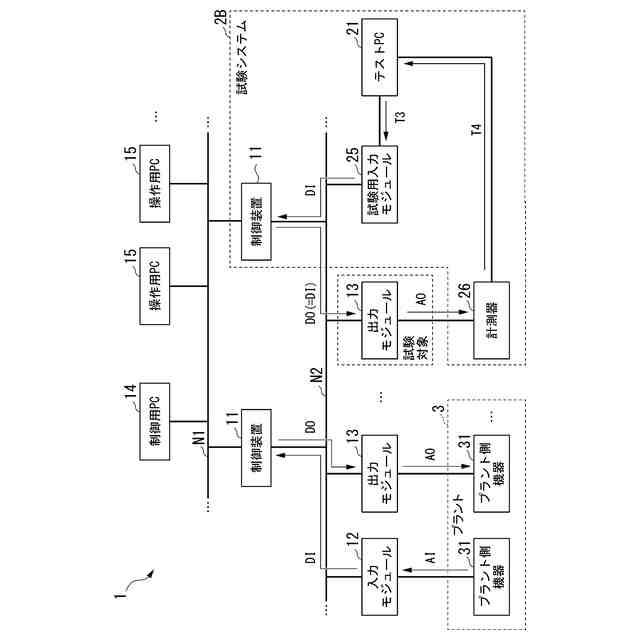
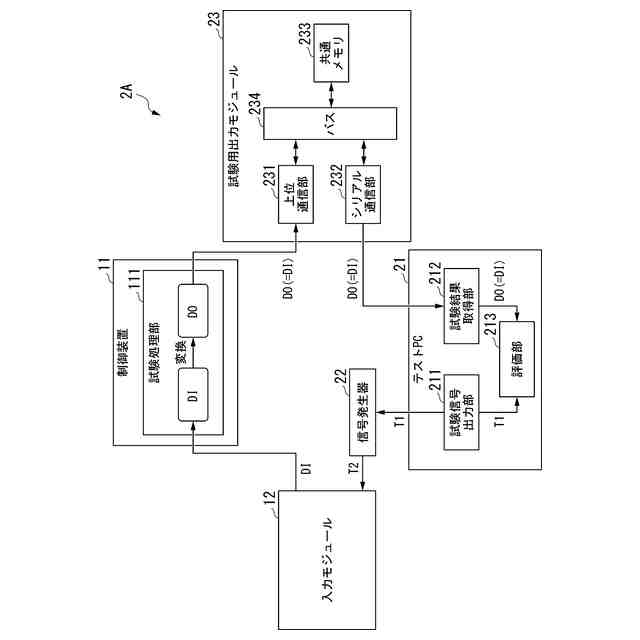
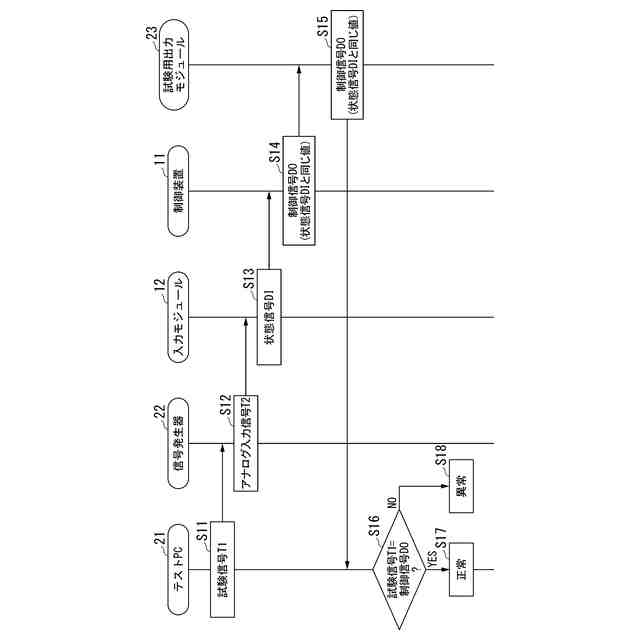
本開示の一態様によれば、入力モジュールの試験方法は、制御対象を制御する制御装置と、前記制御装置に前記制御対象の信号を出力する入力モジュールと、を備える制御システムの入力モジュールの試験方法であって、テストPCが、試験信号を信号発生器に出力するステップと、前記信号発生器が、前記テストPCから出力された前記試験信号に応じたアナログ入力信号を前記入力モジュールに出力するステップと、前記入力モジュールが、前記信号発生器から出力された前記アナログ入力信号をデジタル信号に変換した状態信号を、前記制御装置に出力するステップと、前記制御装置が、前記入力モジュールから出力された前記状態信号を、制御信号として、前記制御装置に接続された試験用出力モジュールに出力するステップと、前記試験用出力モジュールが、前記制御装置から出力された前記制御信号を前記テストPCに出力するステップと、前記テストPCが、前記試験用出力モジュールから出力された前記制御信号と、前記試験信号とを比較して、前記入力モジュールの健全性を評価するステップと、を有する。
【0010】
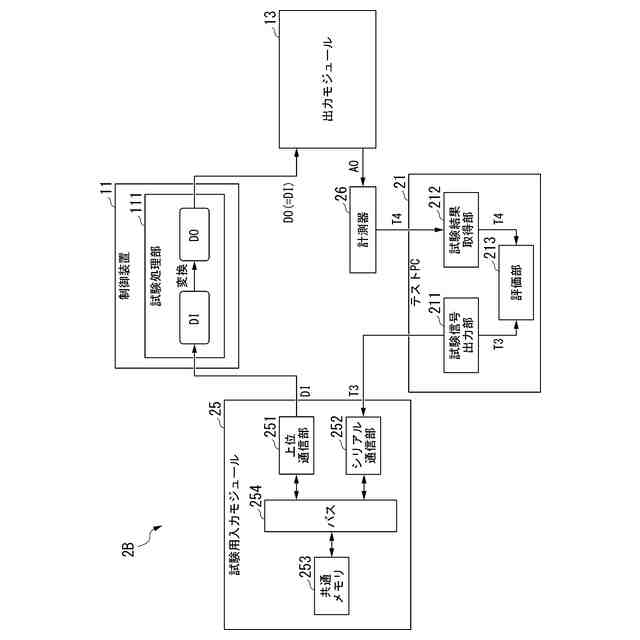
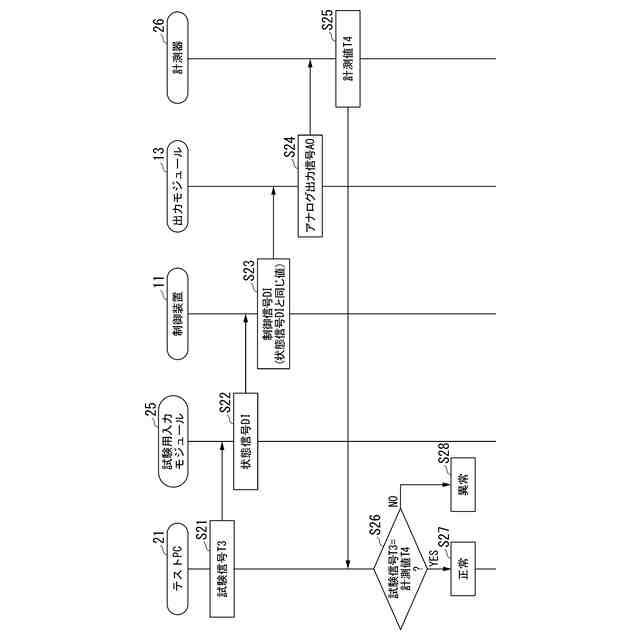
本開示の一態様によれば、出力モジュールの試験方法は、制御対象を制御する制御装置と、前記制御装置の信号を前記制御対象に出力する出力モジュールと、を備える制御システムの出力モジュールの試験方法であって、テストPCが、試験信号を前記制御装置に接続された試験用入力モジュールに出力するステップと、前記試験用入力モジュールが、前記試験信号を前記制御装置に出力するステップと、前記制御装置が、前記試験用入力モジュールから出力された前記試験信号を制御信号として前記出力モジュールに出力するステップと、前記出力モジュールが、前記制御装置から出力された前記制御信号をアナログ信号に変換したアナログ出力信号を、前記出力モジュールに接続された計測器に出力するステップと、前記計測器が、前記出力モジュールから出力された前記アナログ出力信号を計測し、前記アナログ出力信号の計測値を前記テストPCに出力するステップと、前記テストPCが、前記計測器から出力された前記アナログ出力信号の前記計測値と、前記試験信号とを比較して、前記出力モジュールの健全性を評価するステップと、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
13日前
株式会社クボタ
作業車
3日前
ローム株式会社
半導体集積回路
8日前
株式会社ダイフク
搬送車
3日前
トヨタ自動車株式会社
工作機械の制御装置
2日前
トヨタ自動車株式会社
工作機械の制御装置
1日前
株式会社ダイフク
物品搬送設備
1日前
アズビル株式会社
制御システムおよび制御方法
14日前
アズビル株式会社
制御システムおよび制御方法
14日前
ローム株式会社
バイアス回路
2日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
オルガノ株式会社
運転管理方法及び運転管理装置
3日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
6日前
ダイハツ工業株式会社
無人搬送車の制御方法
1日前
ローム株式会社
レギュレータ回路
7日前
ローム株式会社
電源起動監視回路
1日前
岩井ファルマテック株式会社
監査証跡の管理システム
9日前
株式会社TMEIC
リモートI/Oステーション
14日前
株式会社牧野フライス製作所
生産システム
15日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
6日前
三菱ロジスネクスト株式会社
防衛システム
7日前
ソフトバンクグループ株式会社
システム
7日前
トヨタ自動車株式会社
車両用ペダル装置
7日前
ソフトバンクグループ株式会社
システム
7日前
ソフトバンクグループ株式会社
システム
7日前
三菱ロジスネクスト株式会社
防衛システム
7日前
ソフトバンクグループ株式会社
システム
3日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
1日前
キヤノン株式会社
情報処理装置、制御方法及びプログラム
6日前
有限会社村上不動産鑑定士事務所
無人航空機管理システム
6日前
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
6日前
株式会社日立製作所
状態検知装置
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ