TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040024
公報種別
公開特許公報(A)
公開日
2025-03-24
出願番号
2023146663
出願日
2023-09-11
発明の名称
安定構造探索システム、安定構造探索方法及び安定構造探索プログラム
出願人
富士通株式会社
代理人
個人
,
個人
主分類
G06N
99/00 20190101AFI20250314BHJP(計算;計数)
要約
【課題】モデルの安定構造を探索する際の探索精度を更に向上させる。
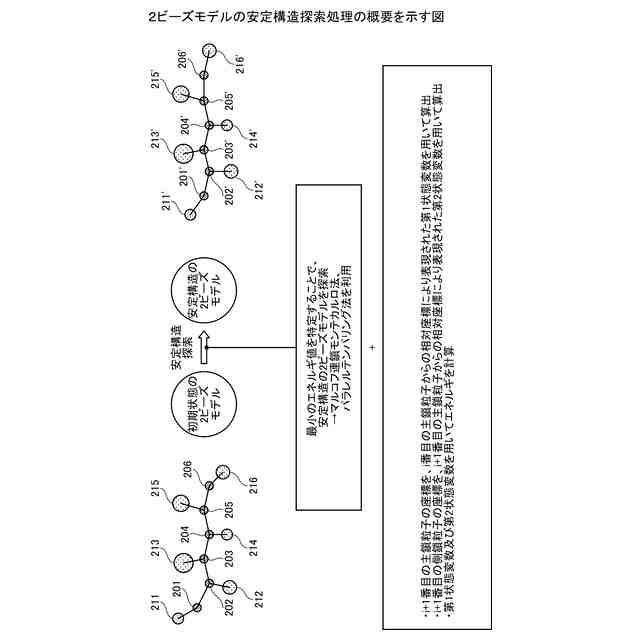
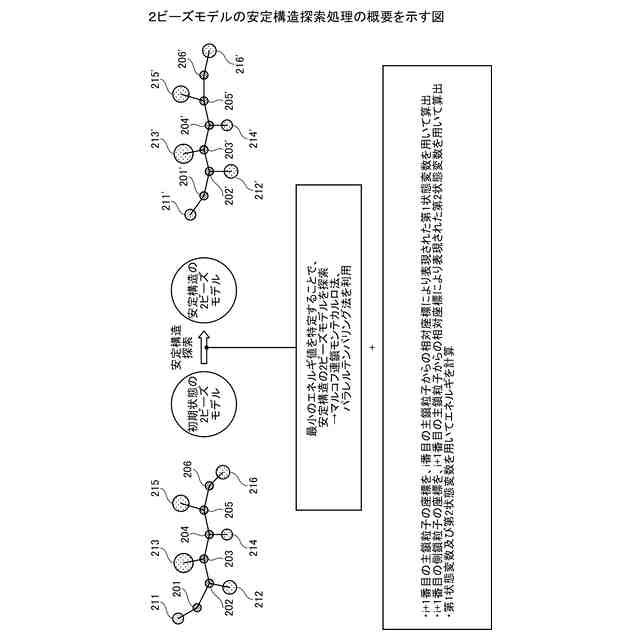
【解決手段】安定構造探索システムは、列に配置されるN個の主鎖粒子と、前記N個の主鎖粒子のそれぞれに対応して接続されるN個の側鎖粒子と、が格子空間に配置されたモデルを取得し、前記列におけるi+1番目の主鎖粒子の座標を、前記列におけるi番目の主鎖粒子の座標と、前記格子空間における前記i番目の主鎖粒子と前記i+1番目の主鎖粒子との相対座標により表現された第1状態変数とを用いて算出し、i+1番目の側鎖粒子の座標を、前記i+1番目の主鎖粒子の座標と、前記i+1番目の主鎖粒子と側鎖粒子との相対座標により表現された第2状態変数とを用いて算出し、前記第1または第2状態変数のいずれかが変更される場合の、前記モデルのエネルギの値を計算し、前記エネルギの値が極小値となる前記第1及び第2状態変数を特定する。
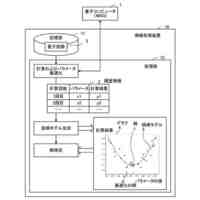
【選択図】図2
特許請求の範囲
【請求項1】
列に配置されるN個(Nは2以上の整数)の主鎖粒子と、前記N個の主鎖粒子のそれぞれに対応して接続されるN個の側鎖粒子と、が格子空間に配置されたモデルを取得し、
前記列におけるi+1番目の主鎖粒子の前記格子空間における座標を、
前記列におけるi番目の主鎖粒子の前記格子空間における座標と、
前記格子空間における前記i番目の主鎖粒子と前記i+1番目の主鎖粒子との相対座標により表現された第1状態変数と
を用いて算出する第1算出部と、
前記i+1番目の主鎖粒子に対応するi+1番目の側鎖粒子の前記格子空間における座標を、
前記i+1番目の主鎖粒子の前記格子空間における座標と、
前記i+1番目の主鎖粒子と前記i+1番目の側鎖粒子との相対座標により表現された第2状態変数と、
を用いて算出する第2算出部と、
前記第1状態変数または前記第2状態変数のいずれかが変更される場合の、前記モデルのエネルギの値を計算する計算部と、
前記エネルギの値が極小値となる前記第1状態変数及び前記第2状態変数を特定する特定部と
を有する安定構造探索システム。
続きを表示(約 2,000 文字)
【請求項2】
前記第1状態変数に含まれるN-1個の値のうちのいずれかの値と、前記第2状態変数に含まれるN個のうちのいずれかの値と、を変更する探索部を更に有する、請求項1に記載の安定構造探索システム。
【請求項3】
前記i+1番目の側鎖粒子の前記格子空間における位置は、i+1番目の側鎖粒子以外の主鎖粒子及び側鎖粒子の位置と重なることがないように決定される、請求項1に記載の安定構造探索システム。
【請求項4】
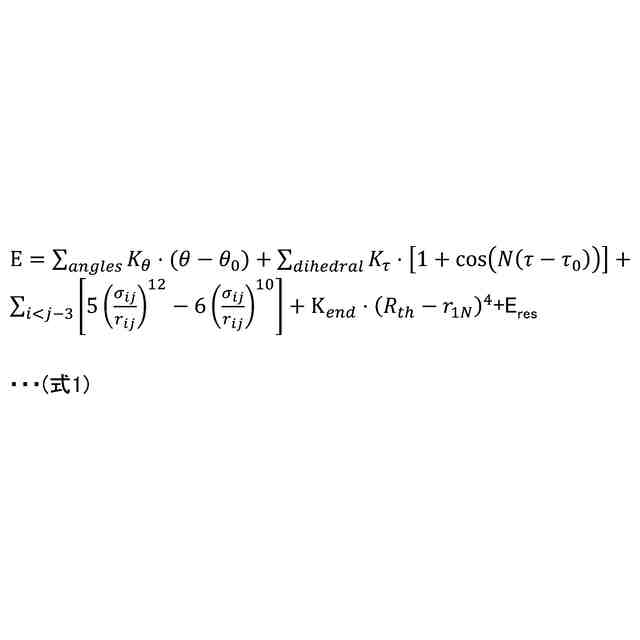
前記計算部は、主鎖粒子及び側鎖粒子の各々の格子空間における座標に基づいて、主鎖粒子及び側鎖粒子の間の相互作用に基づくエネルギの値を算出する、請求項1に記載の安定構造探索システム。
【請求項5】
前記相互作用に基づくエネルギには、
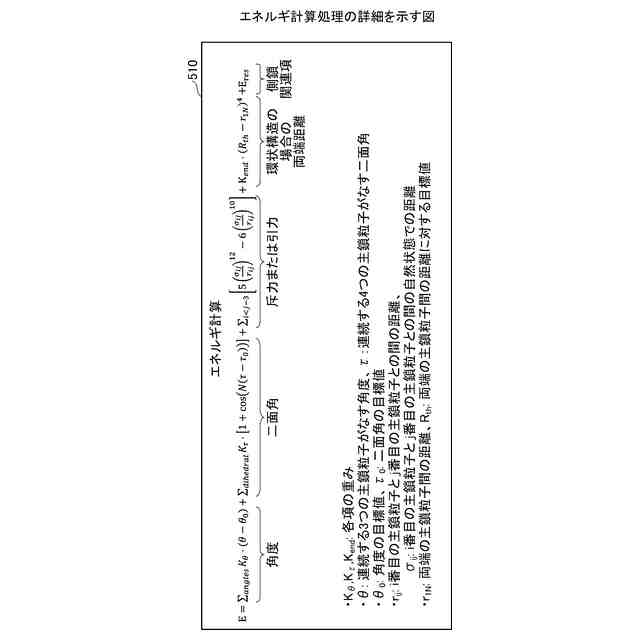
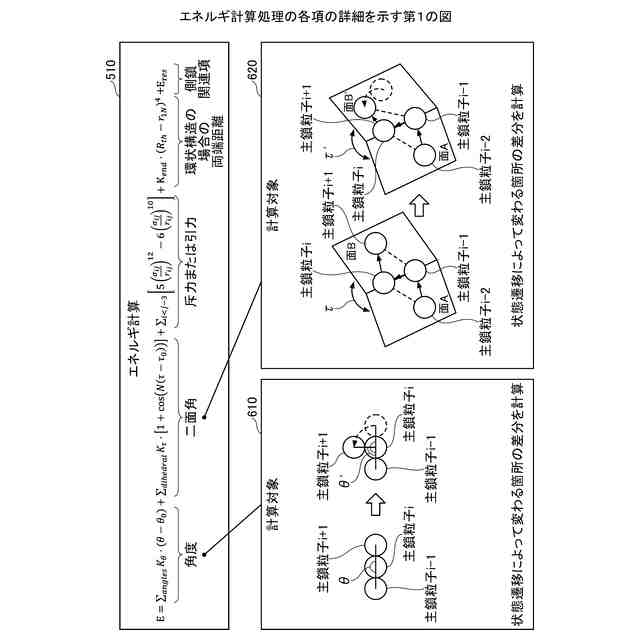
主鎖粒子の間の角度に応じたエネルギ、主鎖粒子の間の二面角に応じたエネルギ、主鎖粒子の間の斥力または引力に応じたエネルギ、環状構造を有する場合の両端の主鎖粒子の間の距離に応じたエネルギ、側鎖粒子の特性に応じたエネルギ、のいずれかが含まれる、請求項4に記載の安定構造探索システム。
【請求項6】
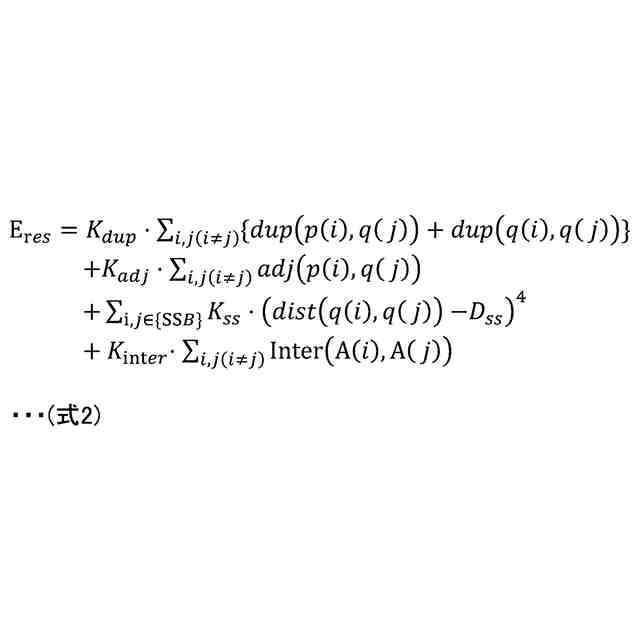
前記側鎖粒子の特性に応じたエネルギには、
i+1番目の側鎖粒子の前記格子空間における座標が、i+1番目の主鎖粒子以外の主鎖粒子及び側鎖粒子の前記格子空間における座標と重複したことに伴うペナルティ、
i+1番目の側鎖粒子の前記格子空間における座標が、i+1番目の主鎖粒子以外の主鎖粒子の前記格子空間における座標と隣接したことに伴うペナルティ、
i+1番目の側鎖粒子であって、SS結合をなす側鎖粒子間の距離が目標値以上であったことに伴うペナルティ、
アミノ酸の種類の組み合わせに応じて導出されるエネルギ、
のいずれかが含まれる、請求項5に記載の安定構造探索システム。
【請求項7】
前記計算部は、前記第1及び第2状態変数が更新された後の前記エネルギと、前記第1及び第2状態変数が更新される前の前記エネルギとの差分を計算する、請求項2に記載の安定構造探索システム。
【請求項8】
前記探索部は、前記計算部により計算された差分が、所定の条件を満たす場合に、前記第1及び第2状態変数の変更が可能であると判定する、請求項7に記載の安定構造探索システム。
【請求項9】
列に配置されるN個(Nは2以上の整数)の主鎖粒子と、前記N個の主鎖粒子のそれぞれに対応して接続されるN個の側鎖粒子と、が格子空間に配置されたモデルを取得し、
前記列におけるi+1番目の主鎖粒子の前記格子空間における座標を、
前記列におけるi番目の主鎖粒子の前記格子空間における座標と、
前記格子空間における前記i番目の主鎖粒子と前記i+1番目の主鎖粒子との相対座標により表現された第1状態変数と
を用いて算出し、
前記i+1番目の主鎖粒子に対応するi+1番目の側鎖粒子の前記格子空間における座標を、
前記i+1番目の主鎖粒子の前記格子空間における座標と、
前記i+1番目の主鎖粒子と前記i+1番目の側鎖粒子との相対座標により表現された第2状態変数と、
を用いて算出し、
前記第1状態変数または前記第2状態変数のいずれかが変更される場合の、前記モデルのエネルギの値を計算し、
前記エネルギの値が極小値となる前記第1状態変数及び前記第2状態変数を特定する、
処理をコンピュータが実行する安定構造探索方法。
【請求項10】
列に配置されるN個(Nは2以上の整数)の主鎖粒子と、前記N個の主鎖粒子のそれぞれに対応して接続されるN個の側鎖粒子と、が格子空間に配置されたモデルを取得し、
前記列におけるi+1番目の主鎖粒子の前記格子空間における座標を、
前記列におけるi番目の主鎖粒子の前記格子空間における座標と、
前記格子空間における前記i番目の主鎖粒子と前記i+1番目の主鎖粒子との相対座標により表現された第1状態変数と
を用いて算出し、
前記i+1番目の主鎖粒子に対応するi+1番目の側鎖粒子の前記格子空間における座標を、
前記i+1番目の主鎖粒子の前記格子空間における座標と、
前記i+1番目の主鎖粒子と前記i+1番目の側鎖粒子との相対座標により表現された第2状態変数と、
を用いて算出し、
前記第1状態変数または前記第2状態変数のいずれかが変更される場合の、前記モデルのエネルギの値を計算し、
前記エネルギの値が極小値となる前記第1状態変数及び前記第2状態変数を特定する、
処理をコンピュータに実行させるための安定構造探索プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、安定構造探索システム、安定構造探索方法及び安定構造探索プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
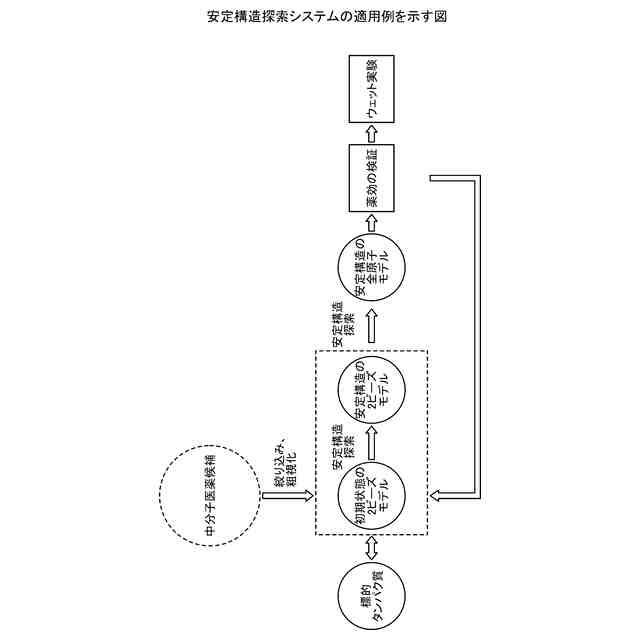
近年、創薬の分野では、副作用の少ない中分子(分子量500~3000)が着目されており、中分子の安定構造を探索するための探索方法の開発が進められている。
【0003】
一例として、本願出願人は、粗視化モデルについて、粗視化粒子間の相互作用ポテンシャルを用いて、安定構造を探索する探索方法を検討している。具体的には、粗視化モデルの安定構造を探索する際の計算量を削減する探索方法を検討している。
【先行技術文献】
【特許文献】
【0004】
特開2021-82165号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記一例の探索方法は、主鎖粒子の安定構造を探索するものであり、探索の際、側鎖粒子の特性までは考慮されていない。
【0006】
一つの側面では、モデルの安定構造を探索する際の探索精度を更に向上させることを目的としている。
【課題を解決するための手段】
【0007】
一態様によれば、安定構造探索システムは、
列に配置されるN個(Nは2以上の整数)の主鎖粒子と、前記N個の主鎖粒子のそれぞれに対応して接続されるN個の側鎖粒子と、が格子空間に配置されたモデルを取得し、
前記列におけるi+1番目の主鎖粒子の前記格子空間における座標を、
前記列におけるi番目の主鎖粒子の前記格子空間における座標と、
前記格子空間における前記i番目の主鎖粒子と前記i+1番目の主鎖粒子との相対座標により表現された第1状態変数と
を用いて算出する第1算出部と、
前記i+1番目の主鎖粒子に対応するi+1番目の側鎖粒子の前記格子空間における座標を、
前記i+1番目の主鎖粒子の前記格子空間における座標と、
前記i+1番目の主鎖粒子と前記i+1番目の側鎖粒子との相対座標により表現された第2状態変数と、
を用いて算出する第2算出部と、
前記第1状態変数または前記第2状態変数のいずれかが変更される場合の、前記モデルのエネルギの値を計算する計算部と、
前記エネルギの値が極小値となる前記第1状態変数及び前記第2状態変数を特定する特定部とを有する。
【発明の効果】
【0008】
モデルの安定構造を探索する際の探索精度を更に向上させることができる。
【図面の簡単な説明】
【0009】
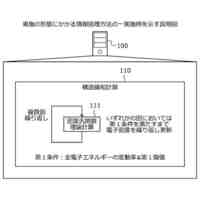
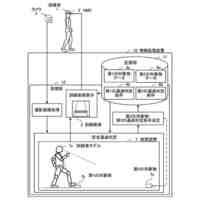
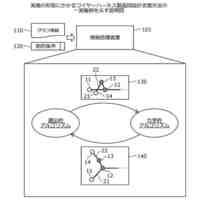
安定構造探索システムの適用例を示す図である。
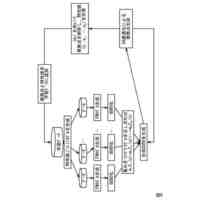
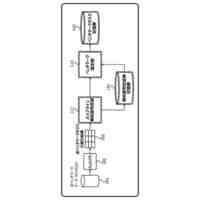
2ビーズモデルの安定構造探索処理の概要を示す図である。
相対座標による表現方法を示す図である。
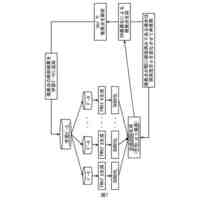
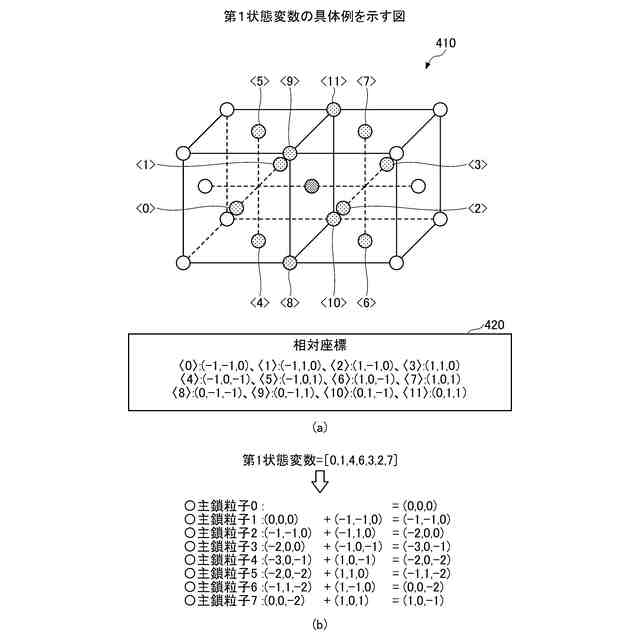
第1状態変数の具体例を示す図である。
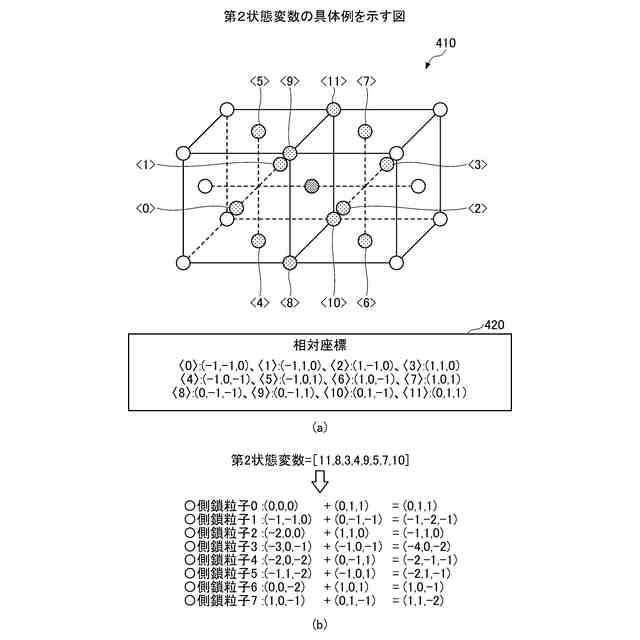
第2状態変数の具体例を示す図である。
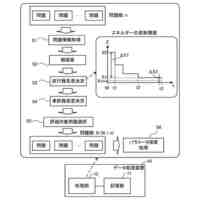
エネルギ計算処理の詳細を示す図である。
エネルギ計算処理の各項の詳細を示す第1の図である。
エネルギ計算処理の各項の詳細を示す第2の図である。
エネルギ計算処理の各項の詳細を示す第3の図である。
アミノ酸残基間の引力の大きさを示した図である。
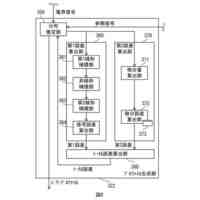
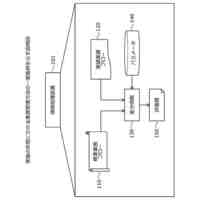
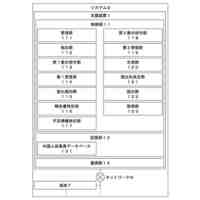
安定構造探索システムのシステム構成及び端末装置の機能構成の一例を示す図である。
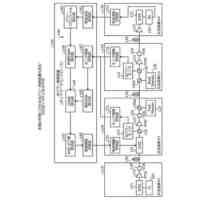
安定構造探索システムのシステム構成及びイジング装置の機能構成の一例を示す図である。
イジング装置の処理の具体例を示す図である。
端末装置のハードウェア構成の一例を示す図である。
安定構造探索処理の流れを示すフローチャートである。
探索処理の詳細を示すフローチャートである。
判定処理の詳細を示すフローチャートである。
計算量の削減効果の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、各実施形態について添付の図面を参照しながら説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複した説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
車線区分装置及び方法
18日前
富士通株式会社
商品棚の検出装置及び方法
14日前
富士通株式会社
商品状態検出装置及び方法
14日前
富士通株式会社
キャッシュメモリ搭載演算装置
3日前
富士通株式会社
伝送路監視装置及び伝送路監視方法
10日前
富士通株式会社
情報処理装置,プログラムおよび制御方法
18日前
富士通株式会社
分子動力学計算プログラム、方法、及び装置
18日前
富士通株式会社
機械学習アプローチを用いたラマンポンプ設計
4日前
富士通株式会社
プログラム、データ処理装置及びデータ処理方法
11日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
14日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
14日前
富士通株式会社
情報処理プログラム、情報処理方法、および管理装置
10日前
富士通株式会社
業務管理プログラム、業務管理方法、および情報処理装置
25日前
富士通株式会社
医薬品管理装置、医薬品管理方法、医薬品管理プログラム
19日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
19日前
富士通株式会社
タスク制御プログラム、情報処理装置及びタスク制御方法
18日前
富士通株式会社
モデル生成プログラム、モデル生成方法および情報処理装置
今日
富士通株式会社
光パワー制御装置、光パワー制御方法および光伝送システム
4日前
富士通株式会社
把持期間判定プログラム,把持期間判定方法及び情報処理装置
10日前
富士通株式会社
歩行訓練支援プログラム、歩行訓練支援方法、および情報処理装置
20日前
富士通株式会社
量子計算支援プログラム、量子計算支援方法、および情報処理装置
26日前
富士通株式会社
基底エネルギー算出プログラム、基底エネルギー算出装置、および基底エネルギー算出方法
27日前
富士通株式会社
サイドリンクリソースの再選択方法及び装置
19日前
富士通株式会社
基地局、移動局、通信システム、及び通信方法
1か月前
富士通株式会社
ワイヤーハーネス製造図設計支援プログラム、ワイヤーハーネス製造図設計支援方法、および情報処理装置
18日前
個人
非正規コート
28日前
個人
在宅介護システム
10日前
個人
人物再現システム
25日前
個人
RFタグ読取装置
10日前
個人
AI飲食最適化プラグイン
18日前
個人
電話管理システム及び管理方法
19日前
有限会社ノア
データ読取装置
26日前
個人
広告提供システムおよびその方法
28日前
株式会社ザメディア
出席管理システム
1か月前
個人
日誌作成支援システム
25日前
株式会社CROSLAN
支援装置
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ