TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070816
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023181374
出願日
2023-10-20
発明の名称
情報処理プログラム、情報処理方法、および管理装置
出願人
富士通株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
19/00 20110101AFI20250424BHJP(計算;計数)
要約
【課題】デジタルツインでは、シミュレーション結果と現実世界との間に誤差が生じてしまうため、より現実に近い結果を出すようにするデータ同化という技術がある。しかしながら、データ同化は、現実世界のあらゆるデータを観測できるわけではないため、実際に観測して用いることができる観測データには限界があり、その精度は十分に高いとはいえない。
【解決手段】情報処理プログラムは、実世界を仮想空間に再現するデジタルツインの管理装置に、実世界に存在する物体の第1の移動量を観測し、仮想空間における物体に対応するエージェントの第2の移動量を特定し、観測した第1の移動量と、特定した第2の移動量とに基づいて、デジタルツインのデータ同化処理を実行する処理をコンピュータに実行させる。
【選択図】図10
特許請求の範囲
【請求項1】
実世界を仮想空間に再現するデジタルツインの管理装置に、
前記実世界に存在する物体の第1の移動量を観測し、
前記仮想空間における前記物体に対応するエージェントの第2の移動量を特定し、
観測した前記第1の移動量と、特定した前記第2の移動量とに基づいて、前記デジタルツインのデータ同化処理を実行する
処理を実行させることを特徴とする情報処理プログラム。
続きを表示(約 2,000 文字)
【請求項2】
観測した前記第1の移動量と、前記仮想空間における前記物体に対応するエージェントの第2の移動量との誤差を特定し、
特定した前記誤差に基づいて、前記仮想空間の前記エージェントの移動需要を動的に変更し、
前記データ同化処理を実行する処理は、
変更した前記移動需要に基づいて、前記第1の移動量と前記第2の移動量との間において、前記デジタルツインのデータ同化処理を実行する
処理を含むことを特徴とする請求項1に記載の情報処理プログラム。
【請求項3】
前記第1の移動量を観測する処理は、
前記実世界の道路または通路における物体の第1の移動量を観測する
処理を含み、
前記誤差を特定する処理は、
観測した前記第1の移動量と、前記仮想空間の道路または通路における前記物体に対応するエージェントの第2の移動量との誤差を特定する
処理を含み、
前記データ同化処理を実行する処理は、
前記第1の移動量と前記第2の移動量とを一致させるように、前記データ同化処理を実行する
処理を含むことを特徴とする請求項2に記載の情報処理プログラム。
【請求項4】
前記第1の移動量を観測する処理は、
カメラが撮影した画像を用いて、前記物体を検出し、検出された前記物体の第1の移動量を特定する
処理を含み、
観測された前記第1の移動量を用いて、前記デジタルツインにおいて、前記第2の移動量をシミュレーションして算出する
処理を前記デジタルツインの管理装置に実行させることを特徴とする請求項2に記載の情報処理プログラム。
【請求項5】
前記第1の移動量を観測する処理は、
前記実世界の道路または通路における所定の交差点間の道路または通路を移動した前記物体の第1の数を、前記第1の移動量として観測する
処理を含み、
前記誤差を特定する処理は、
前記第1の数と、前記仮想空間の道路または通路における所定の交差点間の道路または通路を移動した前記エージェントの第2の数との第1の誤差を、前記誤差として算出する
処理を含むことを特徴とする請求項3に記載の情報処理プログラム。
【請求項6】
前記第1の移動量を観測する処理は、
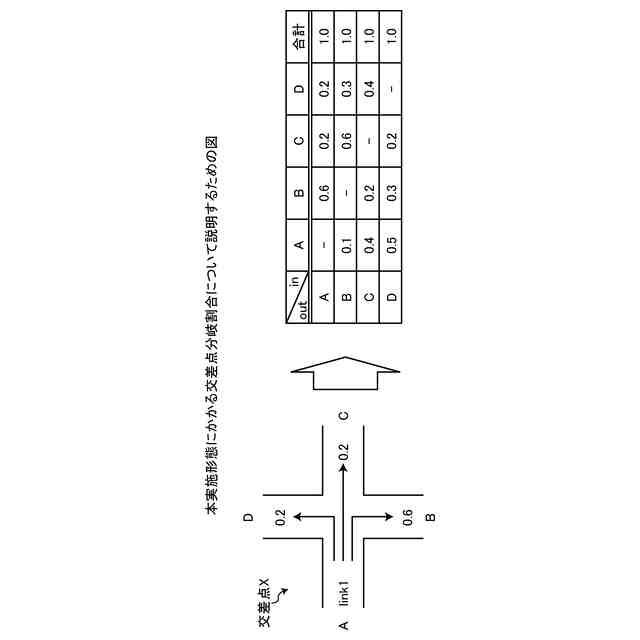
前記実世界の道路または通路における所定の交差点における各分岐へ移動した前記物体の第1の割合を、前記第1の移動量として観測する
処理を含み、
前記誤差を特定する処理は、
前記第1の割合と、前記仮想空間の道路または通路における所定の交差点における各分岐へ移動した前記エージェントの第2の割合との第2の誤差を、前記誤差として算出する
処理を含むことを特徴とする請求項5に記載の情報処理プログラム。
【請求項7】
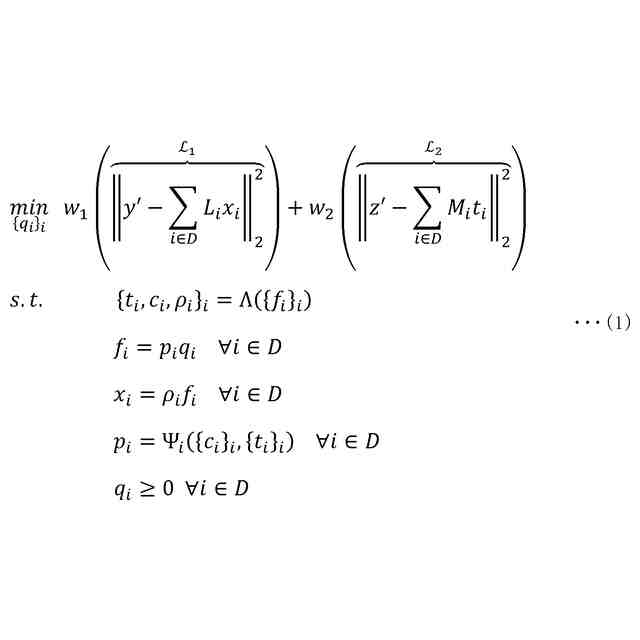
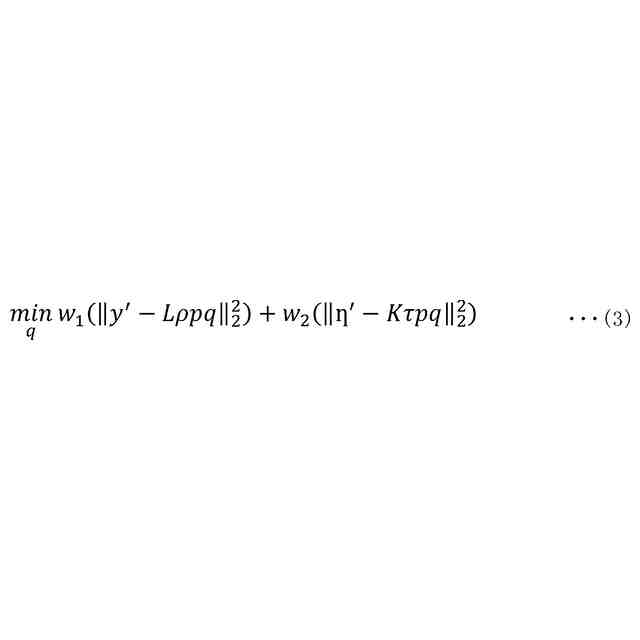
前記第1の誤差と前記第2の誤差との重み付け和を最小化するように、前記実世界の所定の起点から目的地への前記物体の移動量を推定する
処理を前記デジタルツインの管理装置に実行させることを特徴とする請求項6に記載の情報処理プログラム。
【請求項8】
前記第2の移動量を特定する処理は、
前記実世界の道路または通路を再現した仮想空間上の道路または通路を特定し、特定した前記仮想空間上の道路または通路を移動する、前記物体に対応するエージェントの第2の移動量を特定する、
処理を含むことを特徴とする請求項3に記載の情報処理プログラム。
【請求項9】
前記デジタルツインのデータ同化処理が完了した後から次のデータ同化処理が実行される前までの期間において、前記仮想空間上のエージェントを用いて、前記デジタルツインの仮想空間においてシミュレーションを実施することで、前記実世界に存在する物体の移動量の異常の有無を予測し、
前記異常が予測されたときに、前記異常が予測された道路または通路を特定し、
特定された前記道路または前記通路が強調表示された画像を表示装置に表示させる
処理を前記デジタルツインの管理装置に実行させることを特徴とする請求項3に記載の情報処理プログラム。
【請求項10】
実世界を仮想空間に再現するデジタルツインの管理装置が、
前記実世界に存在する物体の第1の移動量を観測し、
前記仮想空間における前記物体に対応するエージェントの第2の移動量を特定し、
観測した前記第1の移動量と、特定した前記第2の移動量とに基づいて、前記デジタルツインのデータ同化処理を実行する
処理を実行することを特徴とする情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理プログラム、情報処理方法、および管理装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
現実世界の物理空間に存在している物体を、仮想空間で表現するための技術として、デジタルツイン(Digital Twin)と呼ばれる技術がある。例えば、デジタルツインでは、IoT(Internet of Things)などを活用して、実際の道路の通過車両数などをリアルタイムに収集して交通シミュレーションを実行し、人の交通需要推定(OD:Origin-destination Demand)などを行っている。
【0003】
一方で、このようなデジタルツインでは、例えば、シミュレーション結果と現実世界との間に、少なからずズレ(誤差)が生じてしまう。そのため、例えば、シミュレーション結果を実際の観測データに突き合わせ、当該観測データに基づいてシミュレーションの軌道を修正し、より現実に近い結果を出すようにするデータ同化という技術がある。
【先行技術文献】
【特許文献】
【0004】
特開2005-182383号公報
特開2018-101205号公報
特開2013-206406号公報
米国特許出願公開第2022/245462号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、データ同化は、例えば、現実世界のあらゆるデータを観測できるわけではないため、実際に観測して用いることができる観測データには限界があり、その精度は十分に高いとはいえない。
【0006】
1つの側面では、デジタルツインにおけるデータ同化の精度を向上させることを目的とする。
【課題を解決するための手段】
【0007】
1つの態様において、情報処理プログラムは、実世界を仮想空間に再現するデジタルツインの管理装置に、実世界に存在する物体の第1の移動量を観測し、仮想空間における物体に対応するエージェントの第2の移動量を特定し、観測した第1の移動量と、特定した第2の移動量とに基づいて、デジタルツインのデータ同化処理を実行する処理をコンピュータに実行させる。
【発明の効果】
【0008】
1つの側面では、デジタルツインにおけるデータ同化の精度を向上させることができる。
【図面の簡単な説明】
【0009】
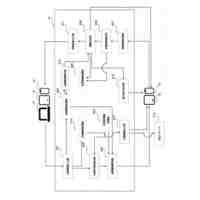
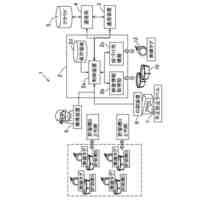
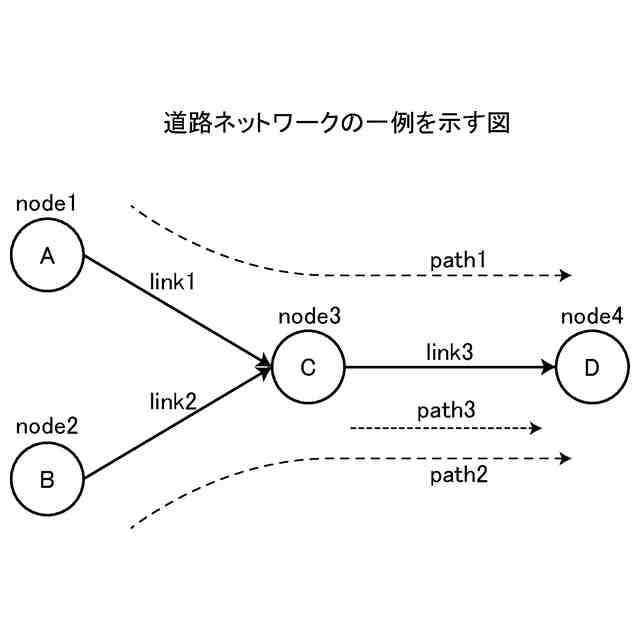
図1は、道路ネットワークの一例を示す図である。
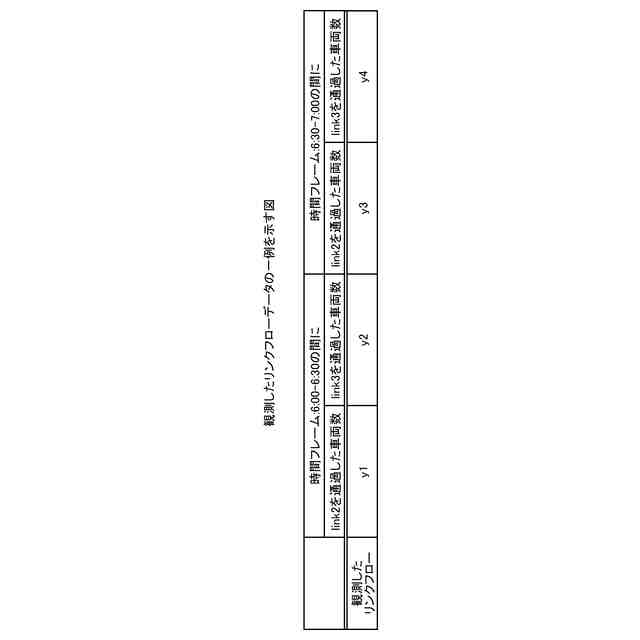
図2は、観測したリンクフローデータの一例を示す図である。
図3は、初期ODフローデータの一例を示す図である。
図4は、シミュレーションしたリンクフローデータの一例を示す図である。
図5は、ODフローデータ更新の一例を示す図である。
図6は、ODフロー推定処理の流れの一例を示すフローチャートである。
図7は、本実施形態にかかる交差点分岐フローについて説明するための図である。
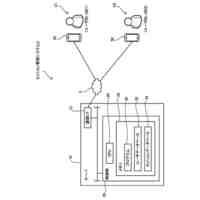
図8は、本実施形態にかかる情報処理システム1の構成例を示す図である。
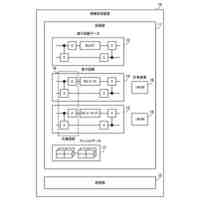
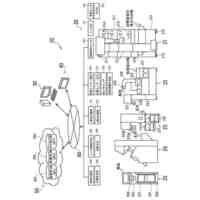
図9は、本実施形態にかかるデジタルツイン管理装置10の構成例を示す図である。
図10は、本実施形態にかかる交差点分岐割合について説明するための図である。
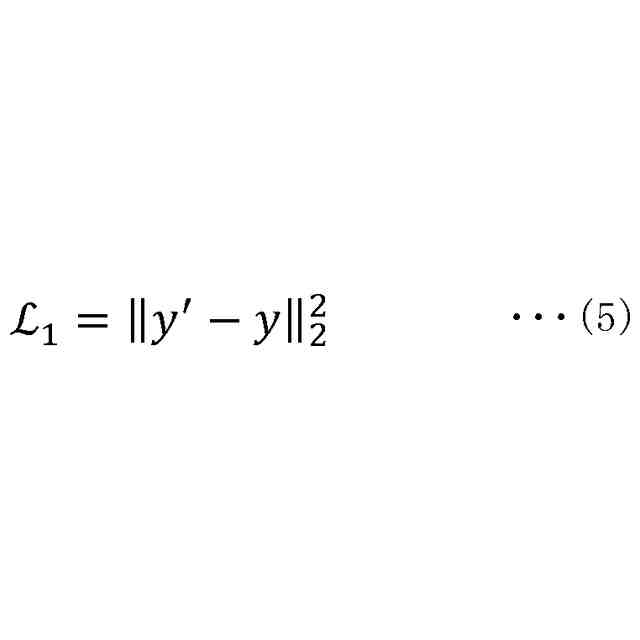
図11は、リンクフロー評価関数L
1
のqに対する微分方程式の一例を示す図である。
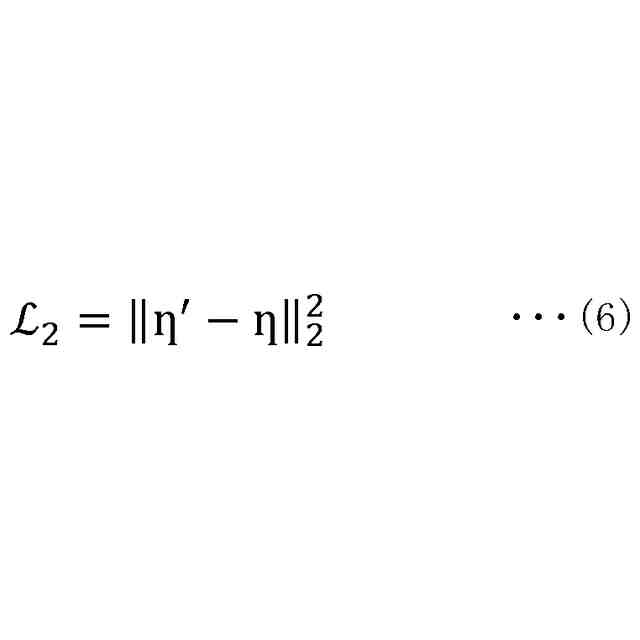
図12は、流入リンクフロー評価関数L
2
のqに対する微分方程式の一例を示す図である。
図13は、本実施形態にかかるODフロー推定の初期設定値の一例を示す図である。
図14は、本実施形態にかかる各観測値の算出例を示す図である。
図15は、本実施形態にかかるODフローの更新例を示す図である。
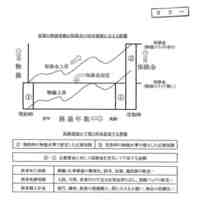
図16は、本実施形態の効果の一例を示す図(1)である。
図17は、本実施形態の効果の一例を示す図(2)である。
図18は、本実施形態にかかるODフローの推定誤差評価の一例を示す図である。
図19は、デジタルツイン管理装置10のハードウェア構成例を説明する図である。
【0010】
以下に、本実施形態にかかる情報処理プログラム、情報処理方法、および管理装置の実施例を図面に基づいて詳細に説明する。なお、この実施例により本実施形態が限定されるものではない。また、各実施例は、矛盾のない範囲内で適宜組み合わせることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
信号相関量の確定装置と方法
11日前
富士通株式会社
データセット特徴タイプ推論
11日前
富士通株式会社
光伝送装置および光伝送システム
12日前
富士通株式会社
双方向光リンクの異常モニタリング
14日前
富士通株式会社
バイアスのための生成人工知能の検査
4日前
富士通株式会社
制御プログラム、制御方法及び決済装置
7日前
富士通株式会社
情報処理プログラムおよび情報処理方法
11日前
富士通株式会社
大規模言語モデルを使用したデータ調整
11日前
富士通株式会社
選択プログラム、選択装置、及び選択方法
14日前
富士通株式会社
無線アクセスネットワークプロビジョニング
11日前
富士通株式会社
光送信機サブ信号光位相差の確定装置と方法
11日前
富士通株式会社
広告画像を生成する方法、装置及び記憶媒体
18日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
11日前
富士通株式会社
量子ビットデバイス及び量子ビットデバイスの製造方法
18日前
富士通株式会社
情報処理プログラム、情報処理方法、及び情報処理装置
12日前
富士通株式会社
情報処理プログラム、情報処理装置、および情報処理方法
7日前
富士通株式会社
光送信機のサブ信号の遅延差のリアルタイム監視装置及び方法
11日前
富士通株式会社
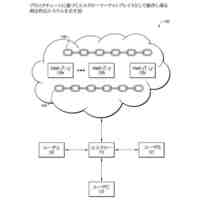
ブロックチェーンに基づくエスクローされたマーケットプレイス
11日前
富士通株式会社
共有メモリ制御プログラム、共有メモリ制御方法および情報処理装置
11日前
富士通株式会社
光伝送路特性推定装置、光伝送システム、及び光伝送路特性推定方法
12日前
富士通株式会社
スタート支援装置、スタート支援方法、およびスタート支援プログラム
12日前
富士通株式会社
棄却なしの並列試行マルコフ連鎖モンテカルロ法を用いた統計的サンプリング
4日前
富士通株式会社
依存情報を列に集約したマトリクススケジューラ及びマトリクススケジューリング方法
19日前
富士通株式会社
量子回路シミュレーションプログラム、量子回路シミュレーション方法および情報処理装置
20日前
富士通株式会社
機械学習プログラム、判定プログラム、機械学習方法、判定方法、機械学習装置、および判定装置
4日前
個人
対話装置
1か月前
個人
情報処理装置
1か月前
個人
情報処理システム
4日前
個人
情報処理装置
28日前
個人
検査システム
6日前
個人
記入設定プラグイン
20日前
株式会社サタケ
籾摺・調製設備
5日前
個人
不動産売買システム
12日前
キヤノン電子株式会社
携帯装置
5日前
個人
情報入力装置
1か月前
個人
物価スライド機能付生命保険
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ