TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037654
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144718
出願日
2023-09-06
発明の名称
検査システムおよび検査方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
G01N
21/88 20060101AFI20250311BHJP(測定;試験)
要約
【課題】ワークの曲率が大きい曲面または複雑な曲面の部分であっても、対象の位置を精度よく示すことが可能な検査システムを提供する。
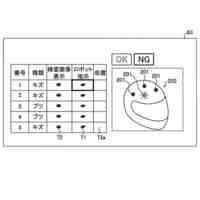
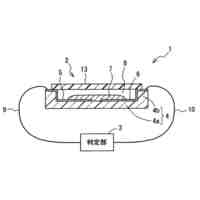
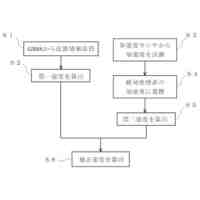
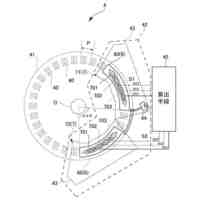
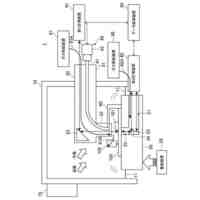
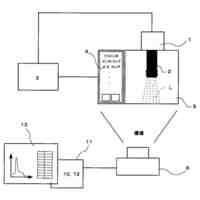
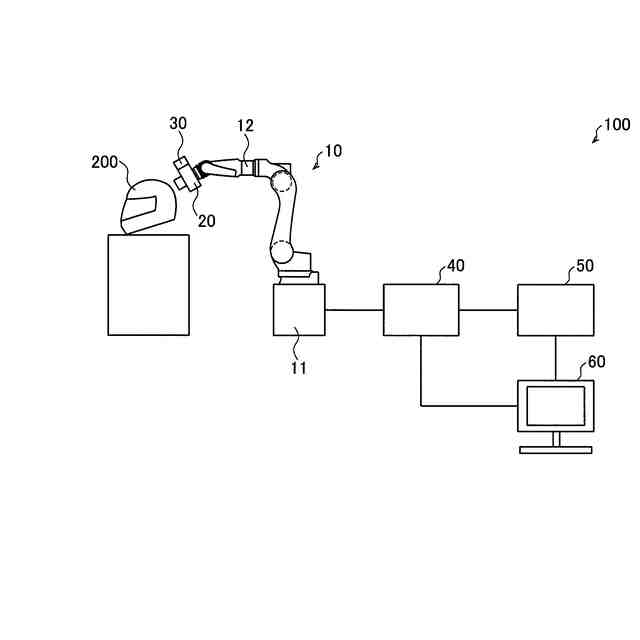
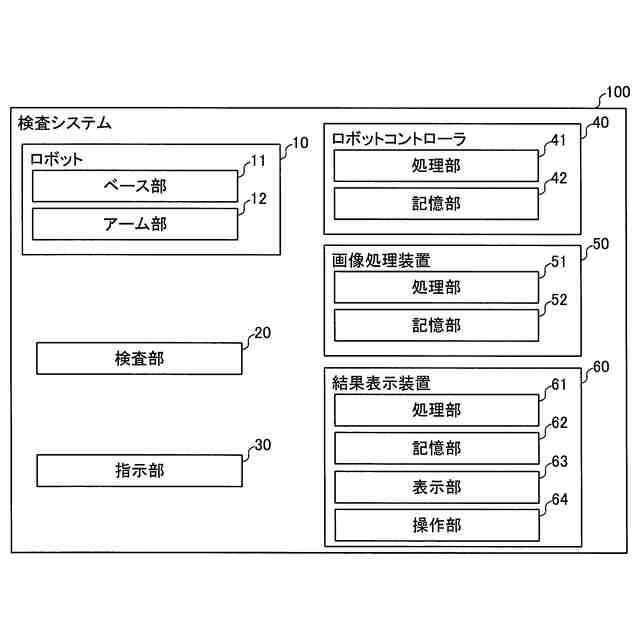
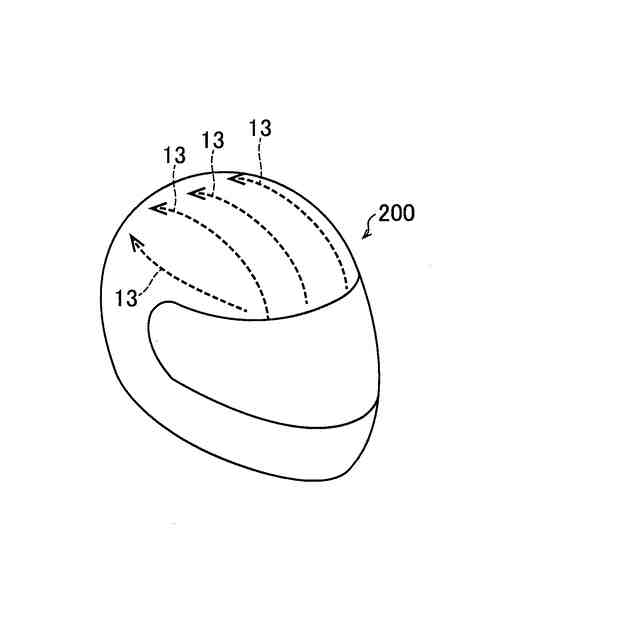
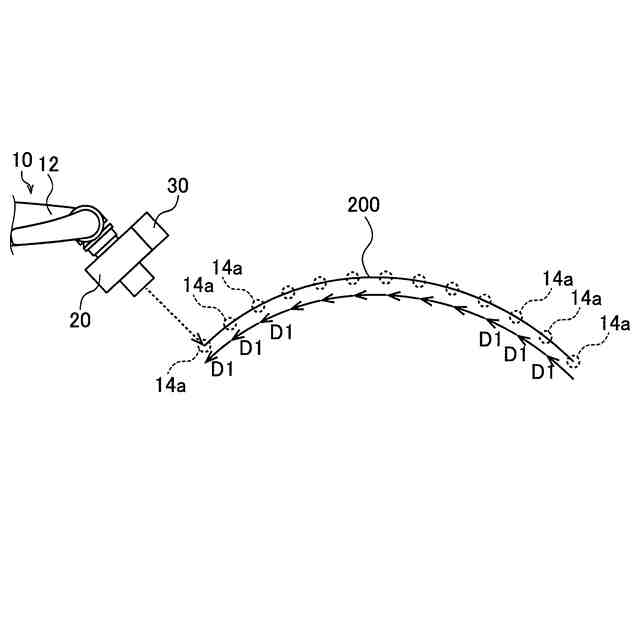
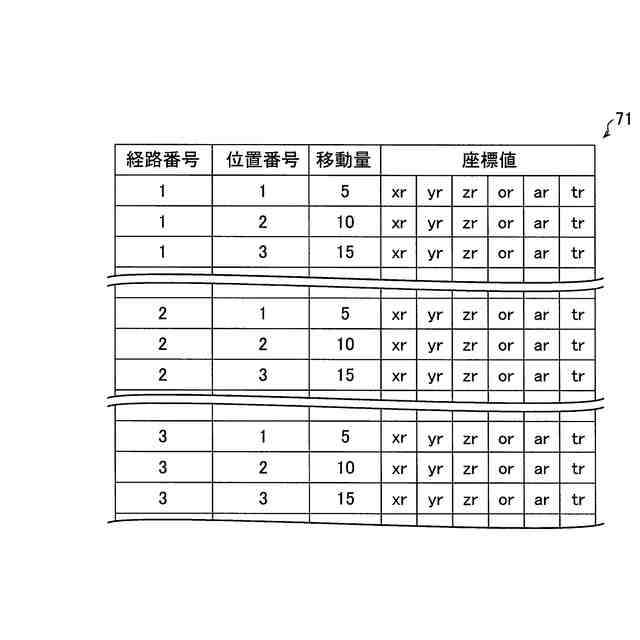
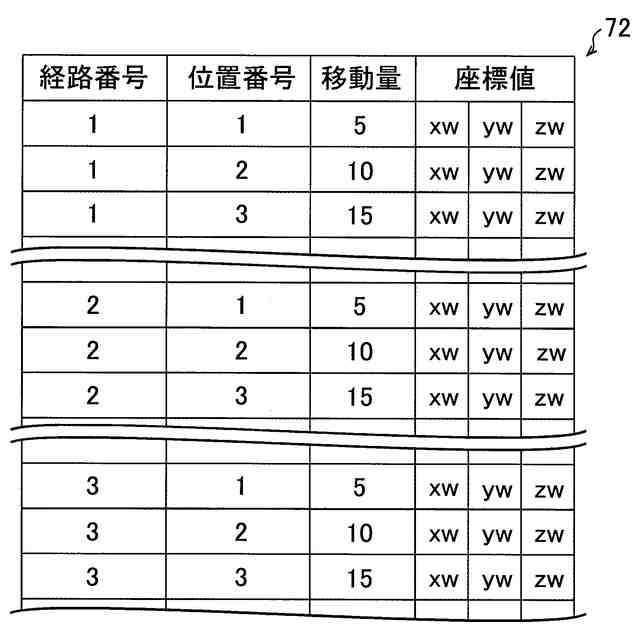
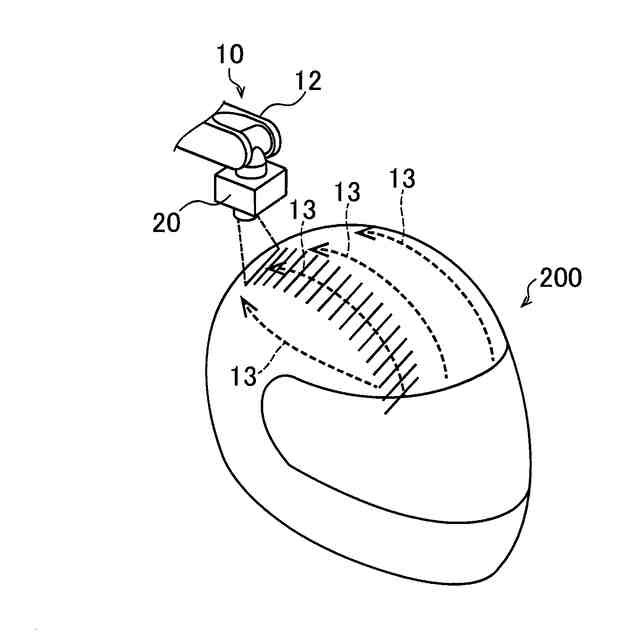
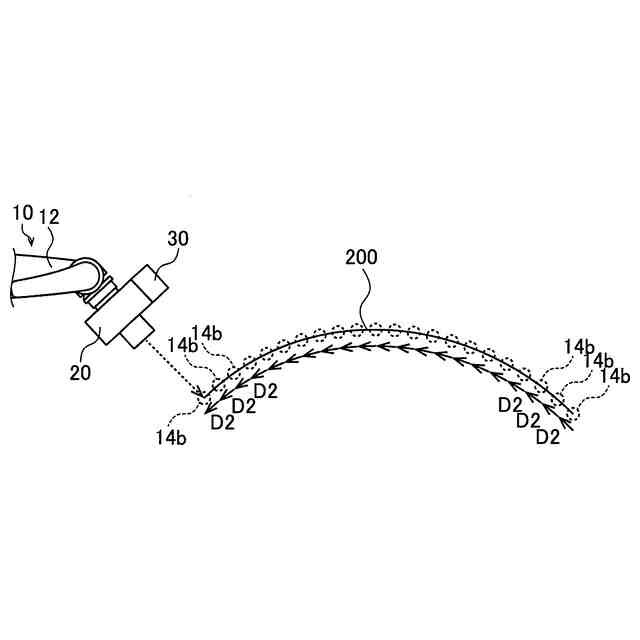
【解決手段】この検査システム100は、ロボット10と、検査部20と、処理部41、51、61とを備える。処理部41、51、61は、ロボット10の移動経路13を生成する処理と、移動経路13に基づいて、座標変換情報71、72を生成する処理と、移動経路13に基づいて、ロボット10を動作させて、検査部20によりワーク200を検査することにより検査画像21を取得する処理と、検査画像21内のワーク200の対象201を検出する処理と、座標変換情報71、72に基づいて、対象201の検査座標系の座標値を、3次元座標系の座標値に変換する処理と、対象201の3次元座標系の座標値に基づいて、対象201の位置を、実物のワーク200またはワーク200の3次元画像に示す処理と、を行う。
【選択図】図12
特許請求の範囲
【請求項1】
ロボットと、
ワークを検査する検査部と、
前記ロボットにより前記ワークに対して前記検査部を相対的に移動させて、前記検査部により前記ワークを検査する際の、前記ロボットの移動経路を生成する処理と、
生成した前記移動経路に基づいて、前記検査部により前記ワークを検査することにより取得される検査画像の検査座標系の座標値を、前記ワークの座標値を3次元で表すことが可能な3次元座標系の座標値に変換するための座標変換情報を生成する処理と、
生成した前記移動経路に基づいて、前記ロボットを動作させて、前記検査部により前記ワークを検査することにより前記検査画像を取得する処理と、
取得した前記検査画像内の前記ワークの対象を検出する処理と、
生成した前記座標変換情報に基づいて、前記対象の前記検査座標系の座標値を、前記3次元座標系の座標値に変換する処理と、
変換した前記対象の前記3次元座標系の座標値に基づいて、前記対象の位置を、実物の前記ワークまたは前記ワークの3次元画像に示す処理と、
を行う、処理部と、を備える、検査システム。
続きを表示(約 1,500 文字)
【請求項2】
前記処理部は、前記移動経路に沿って第1距離間隔ごとに前記3次元座標系の座標値を取得して、前記座標変換情報を生成する処理を行う、請求項1に記載の検査システム。
【請求項3】
前記処理部は、前記移動経路に沿って第2距離間隔ごとに前記検査部を前記ワークを検査するように動作させて、前記検査画像を取得する処理を行い、
前記第1距離間隔は、前記第2距離間隔よりも大きい、請求項2に記載の検査システム。
【請求項4】
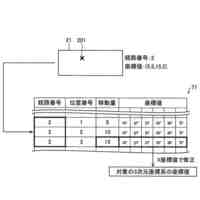
前記座標変換情報は、前記移動経路に沿った方向の前記ロボットの移動量と、前記3次元座標系の座標値とを対応付けた座標変換テーブルであり、
前記処理部は、前記対象の前記検査座標系の座標値を前記3次元座標系の座標値に変換する処理において、
前記対象の前記移動経路に沿った方向における前記検査座標系の座標値に対応する前記座標変換テーブルの前記ロボットの移動量を取得する処理と、
取得した前記座標変換テーブルの前記ロボットの移動量に対応する前記座標変換テーブルの前記3次元座標系の座標値を取得する処理と、
取得した前記座標変換テーブルの前記3次元座標系の座標値を、前記対象の前記移動経路に直交する方向における前記検査座標系の座標値に基づいて修正する処理と、
を行う、請求項1に記載の検査システム。
【請求項5】
前記ロボットに配置され、実物の前記ワークに対して前記対象の位置を示す指示部をさらに備え、
前記3次元座標系は、前記ロボットに関するロボット座標系であり、
前記処理部は、前記ロボット座標系の座標値に変換した前記対象の座標値に基づいて、前記ロボットを動作させて、前記指示部により実物の前記ワークに前記対象の位置を示す処理を行う、請求項1に記載の検査システム。
【請求項6】
前記3次元座標系は、前記ワークに関するワーク座標系であり、
前記処理部は、前記ワーク座標系の座標値に変換した前記対象の座標値に基づいて、前記ワークの3次元画像に前記対象の位置を示す処理を行う、請求項1に記載の検査システム。
【請求項7】
前記3次元座標系は、前記ロボットに関するロボット座標系であり、
前記処理部は、前記ロボット座標系の座標値に変換した複数の前記対象の座標値がしきい値範囲内にある場合、前記複数の対象を1つの前記対象として、前記対象の位置を、実物の前記ワークに示す処理を行う、請求項1に記載の検査システム。
【請求項8】
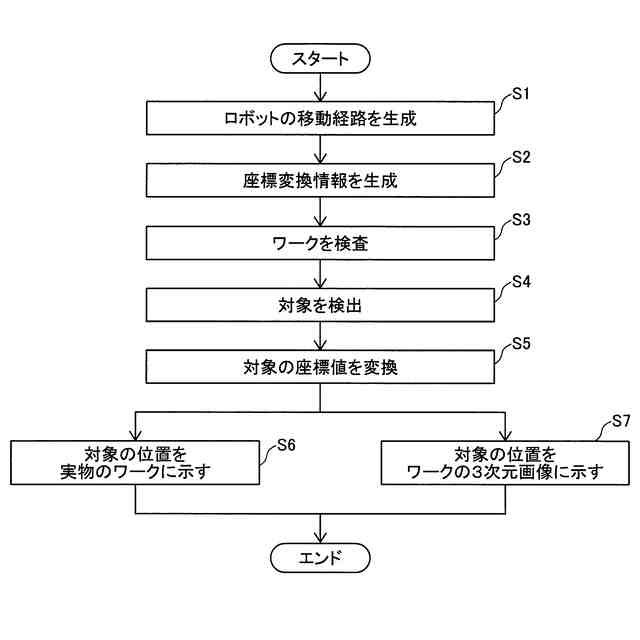
ロボットによりワークに対して検査部を相対的に移動させて、前記検査部により前記ワークを検査する際の、前記ロボットの移動経路を生成することと、
生成した前記移動経路に基づいて、前記検査部により前記ワークを検査することにより取得される検査画像の検査座標系の座標値を、前記ワークの座標値を3次元で表すことが可能な3次元座標系の座標値に変換するための座標変換情報を生成することと、
生成した前記移動経路に基づいて、前記ロボットを動作させて、前記検査部により前記ワークを検査することにより前記検査画像を取得することと、
取得した前記検査画像内の前記ワークの対象を検出することと、
生成した前記座標変換情報に基づいて、前記対象の前記検査座標系の座標値を、前記3次元座標系の座標値に変換することと、
変換した前記対象の前記3次元座標系の座標値に基づいて、前記対象の位置を、実物の前記ワークまたは前記ワークの3次元画像に示すことと、を備える、検査方法。
発明の詳細な説明
【技術分野】
【0001】
この開示は、検査システムおよび検査方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、塗装品質検査方法が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、塗装が完了した塗装物としての車体の塗装品質を検査する塗装品質検査方法が開示されている。この塗装品質検査方法では、まず、テレビカメラにより車体が撮像される。そして、撮像された車体の画像に基づく画像情報が、コンピュータによって解析される。そして、塗装欠陥があるか否かが判断されるとともに、塗装欠陥があると判断された場合、車体のどの位置に塗装欠陥が発生しているかが求められる。そして、プリントアウト用の用紙に描かれた車体の絵に、塗装欠陥の位置が印字される。
【先行技術文献】
【特許文献】
【0004】
特開平05-126758号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載された塗装品質検査方法では、2次元の画像としての車体の絵に塗装欠陥の位置を印字する構成であるため、実物の車体において平面または曲率が小さい曲面の部分では、車体の絵においても塗装欠陥の位置を精度よく示すことが可能である一方で、実物の車体において曲率が大きい曲面または複雑な曲面の部分では、車体の絵において塗装欠陥の位置を精度よく示すことが困難な場合があるという不都合がある。このような不都合は、塗装欠陥以外の対象を検出する場合、および、車体以外のワークを検査する場合にも同様である。このように、ワークの絵ではワークの曲率が大きい曲面または複雑な曲面の部分において対象の位置を精度よく示すことができない場合があるため、ワークの曲率が大きい曲面または複雑な曲面の部分であっても、対象の位置を精度よく示すことが望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、ワークの曲率が大きい曲面または複雑な曲面の部分であっても、対象の位置を精度よく示すことが可能な検査システムおよび検査方法を提供することである。
【課題を解決するための手段】
【0007】
この開示の第1の局面による検査システムは、ロボットと、ワークを検査する検査部と、ロボットによりワークに対して検査部を相対的に移動させて、検査部によりワークを検査する際の、ロボットの移動経路を生成する処理と、生成した移動経路に基づいて、検査部によりワークを検査することにより取得される検査画像の検査座標系の座標値を、ワークの座標値を3次元で表すことが可能な3次元座標系の座標値に変換するための座標変換情報を生成する処理と、生成した移動経路に基づいて、ロボットを動作させて、検査部によりワークを検査することにより検査画像を取得する処理と、取得した検査画像内のワークの対象を検出する処理と、生成した座標変換情報に基づいて、対象の検査座標系の座標値を、3次元座標系の座標値に変換する処理と、変換した対象の3次元座標系の座標値に基づいて、対象の位置を、実物のワークまたはワークの3次元画像に示す処理と、を行う、処理部と、を備える。
【0008】
この開示の第1の局面による検査システムでは、上記のように、生成した座標変換情報に基づいて、対象の検査座標系の座標値を、3次元座標系の座標値に変換する処理と、変換した対象の3次元座標系の座標値に基づいて、対象の位置を、実物のワークまたはワークの3次元画像に示す処理と、を行う。これにより、対象の位置を、実物のワークまたはワークの3次元画像に示すことができるので、対象の位置をワークの2次元の画像に示す場合と異なり、ワークの曲率が大きい曲面または複雑な曲面の部分であっても、対象の位置を精度よく示すことができる。
【0009】
この開示の第2の局面による検査方法は、ロボットによりワークに対して検査部を相対的に移動させて、検査部によりワークを検査する際の、ロボットの移動経路を生成することと、生成した移動経路に基づいて、検査部によりワークを検査することにより取得される検査画像の検査座標系の座標値を、ワークの座標値を3次元で表すことが可能な3次元座標系の座標値に変換するための座標変換情報を生成することと、生成した移動経路に基づいて、ロボットを動作させて、検査部によりワークを検査することにより検査画像を取得することと、取得した検査画像内のワークの対象を検出することと、生成した座標変換情報に基づいて、対象の検査座標系の座標値を、3次元座標系の座標値に変換することと、変換した対象の3次元座標系の座標値に基づいて、対象の位置を、実物のワークまたはワークの3次元画像に示すことと、を備える。
【0010】
この開示の第2の局面による検査方法では、上記のように、ロボットの移動経路に基づいて生成した座標変換情報に基づいて、対象の検査座標系の座標値を、3次元座標系の座標値に変換することと、変換した対象の3次元座標系の座標値に基づいて、対象の位置を、実物のワークまたはワークの3次元画像に示すことと、を行う。これにより、対象の位置を、実物のワークまたはワークの3次元画像に示すことができるので、対象の位置をワークの2次元の画像に示す場合と異なり、ワークの曲率が大きい曲面または複雑な曲面の部分であっても、対象の位置を精度よく示すことが可能な検査方法を提供することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
検査システムおよび検査方法
今日
川崎重工業株式会社
検査システムおよび検査方法
今日
川崎重工業株式会社
グリス交換時期予測方法
4日前
株式会社大真空
センサ
18日前
学校法人同志社
測位システム
6日前
株式会社トプコン
植物センサ
29日前
アズビル株式会社
圧力センサ
11日前
日本FC企画株式会社
特性試験装置
4日前
アズビル株式会社
湿度センサ
26日前
日本精機株式会社
基板及び表示装置
6日前
日本FC企画株式会社
特性試験装置
14日前
日本碍子株式会社
ガスセンサ
11日前
株式会社ミツトヨ
エンコーダ
12日前
株式会社ミツトヨ
自動測定装置
5日前
株式会社ミツトヨ
自動測定装置
5日前
株式会社ミツトヨ
変位測定装置
25日前
株式会社SUBARU
車載装置
今日
アズビル株式会社
濃度計測装置
5日前
株式会社小野測器
回転計測装置
25日前
株式会社東芝
センサ
11日前
株式会社東芝
センサ
25日前
本多電子株式会社
水中探知装置
5日前
株式会社東芝
試験装置
今日
アズビル株式会社
検査用プローブ
19日前
エスペック株式会社
環境試験装置
11日前
産電工業株式会社
水道検針システム
4日前
古河電気工業株式会社
漏水検知構造
12日前
株式会社ノーリツ
温度センサ取付具
12日前
靜甲株式会社
液切れ性評価システム
1日前
トヨタ自動車株式会社
異音解析方法
25日前
個人
レーザージャイロ応用重力場計測装置
13日前
株式会社ノーリツ
温度センサ取付具
12日前
積水ハウス株式会社
測定治具
11日前
アズビル株式会社
回転角度計測装置
5日前
トヨタ自動車株式会社
NVH解析装置
25日前
株式会社桧鉄工所
流速計
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ