TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037294
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144116
出願日
2023-09-06
発明の名称
溶接ロボットシステム
出願人
技術研究組合産業用ロボット次世代基礎技術研究機構
,
国立大学法人神戸大学
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250311BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークの溶接部分と溶接トーチのずれを小さくすることができる遠隔操作式の溶接ロボットシステムを提供する。
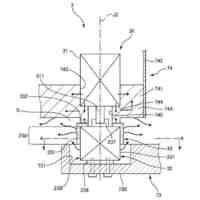
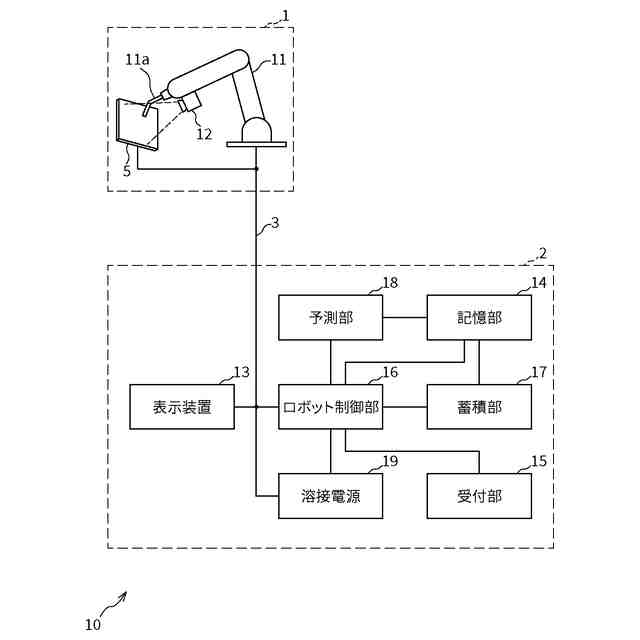
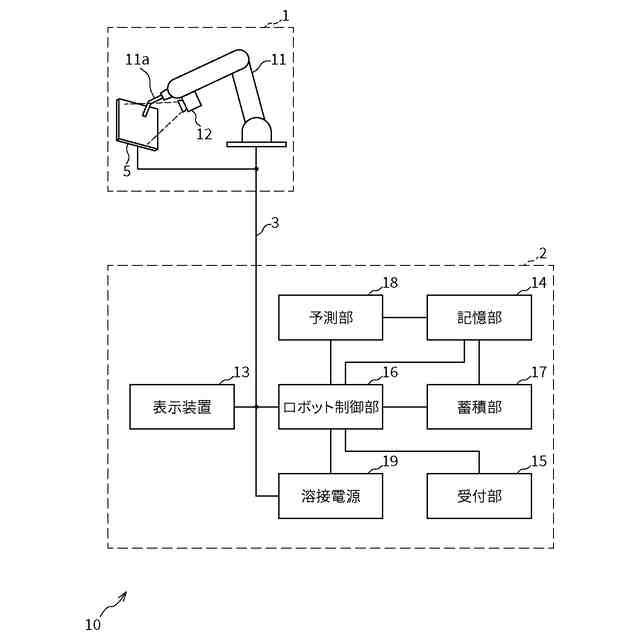
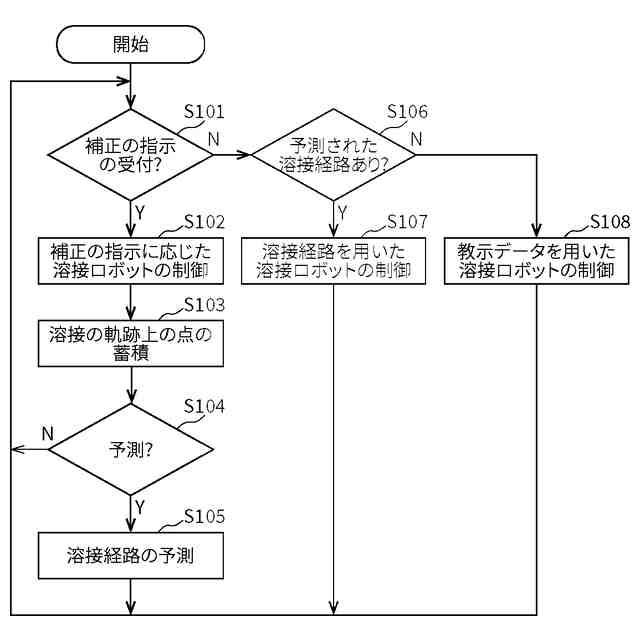
【解決手段】溶接ロボットシステム10は、溶接ロボット11と、ワーク5の未溶接の溶接部分を撮影するカメラ12と、撮影された映像を表示する表示装置13と、映像の表示に応じて、作業者から溶接位置の補正の指示を受け付ける受付部15と、教示データに基づいて溶接ロボット11を制御して溶接を行わせると共に、受け付けられた指示に応じて溶接位置を補正するための制御を行うロボット制御部16と、溶接ロボット11による溶接の軌跡上の複数の点の位置を蓄積する蓄積部17と、蓄積された複数の点の位置を用いて溶接経路を予測する予測部18とを備え、ロボット制御部16は、予測された溶接経路に沿って溶接トーチが移動するように溶接ロボット11を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
溶接トーチを移動させる溶接ロボットと、
前記溶接ロボットに取り付けられており、ワークの未溶接の溶接部分を撮影するカメラと、
前記カメラによって撮影された映像を表示する表示装置と、
前記表示装置による映像の表示に応じて、作業者から溶接位置の補正の指示を受け付ける受付部と、
教示データに基づいて前記溶接ロボットを制御して溶接を行わせると共に、前記受付部によって受け付けられた指示に応じて溶接位置を補正するための制御を行うロボット制御部と、
前記溶接ロボットによる溶接の軌跡上の複数の点の位置を蓄積する蓄積部と、
前記蓄積部によって蓄積された複数の点の位置を用いて溶接経路を予測する予測部と、を備え、
前記ロボット制御部は、前記予測部によって予測された溶接経路に沿って前記溶接トーチが移動するように前記溶接ロボットを制御する、溶接ロボットシステム。
続きを表示(約 500 文字)
【請求項2】
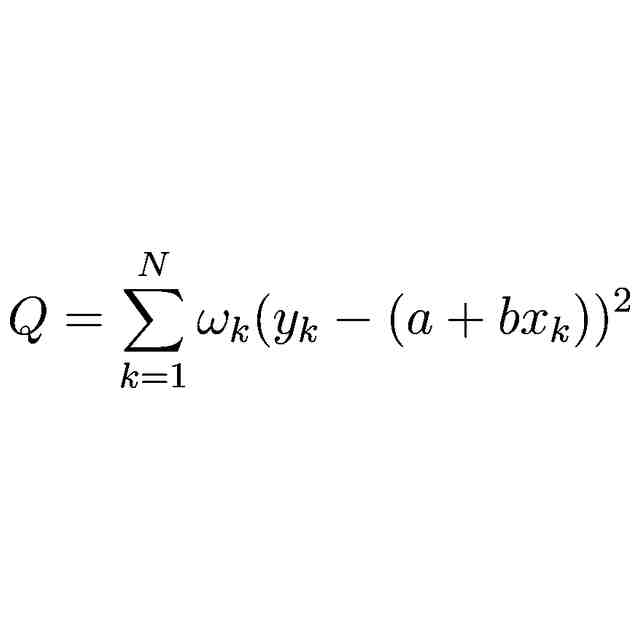
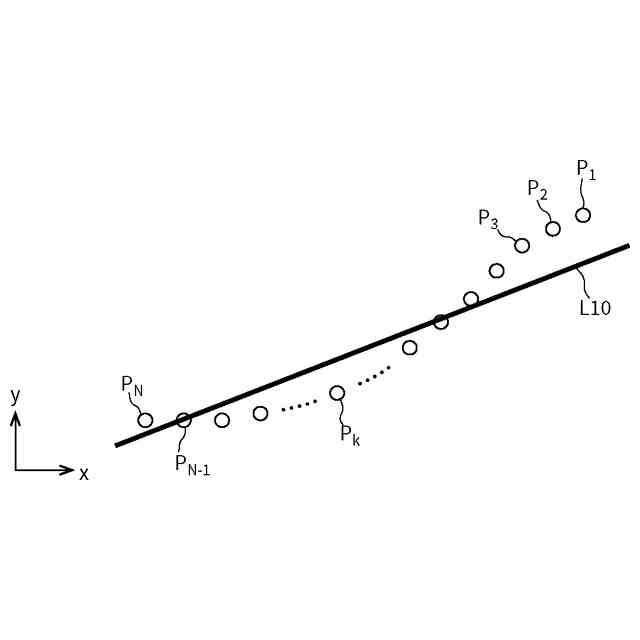
前記予測部は、前記複数の点と、所定の線形状の近似線との差に応じた目的関数を最適化するように近似線の位置を特定し、当該特定した近似線の位置に応じた前記溶接経路を予測する、請求項1記載の溶接ロボットシステム。
【請求項3】
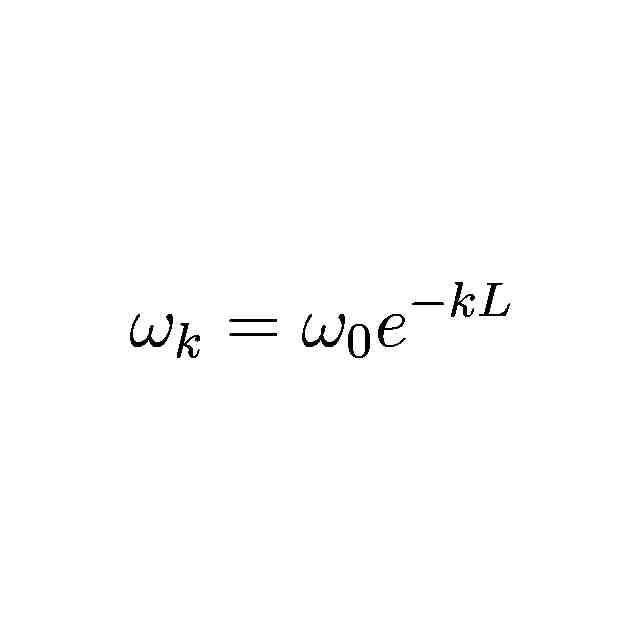
前記予測部は、前記複数の点と前記近似線との差に、現時点と溶接時点との差が大きいほど小さくなる重みを付けた目的関数を最適化する、請求項2記載の溶接ロボットシステム。
【請求項4】
前記所定の線形状は直線状である、請求項2または請求項3記載の溶接ロボットシステム。
【請求項5】
前記表示装置は、前記予測部によって予測された溶接経路に沿って前記溶接トーチが移動する場合に、当該溶接経路の方向が、あらかじめ決められた向きになる映像を表示する、請求項1から請求項3のいずれか記載の溶接ロボットシステム。
【請求項6】
前記受付部は、前記予測部によって予測された溶接経路に沿って前記溶接トーチが移動する場合には、当該溶接経路に垂直な方向における補正の指示を受け付ける、請求項5記載の溶接ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作によって溶接ロボットを動作させる溶接ロボットシステムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
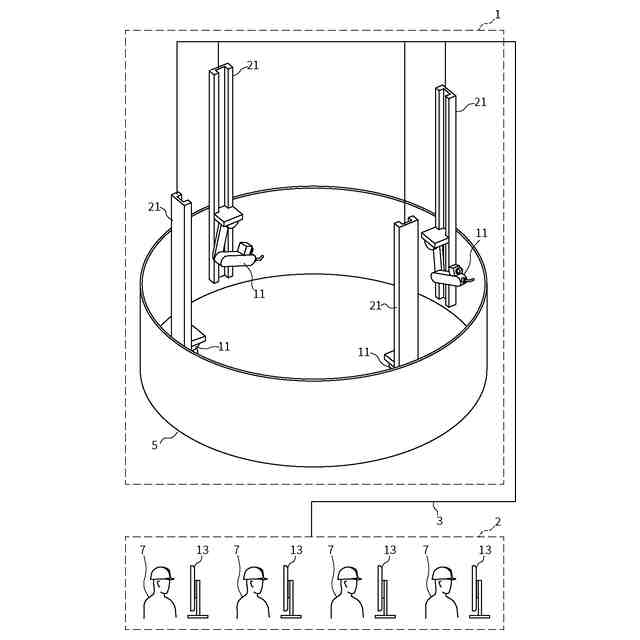
船舶やプラントタンクなどの大型構造物の溶接施工は、作業者の立ち入りが困難な場所、例えば、高所や狭所などで行われることが多いため、溶接ロボットによる自動溶接施工が導入されている。また、そのような溶接施工では、仮に溶接欠陥が発生した場合には重大な事故に繋がることがあるため、高品質な溶接、例えば、気密性の高い溶接が要求される。完全な自動溶接施工では、そのような高品質性を担保することができないことがあるため、ワークを自動で溶接する溶接ロボットシステムにおいて、作業者がカメラによって撮影された映像を遠隔地から見ながら、熱歪み等に起因する溶接部分のずれに対して溶接トーチの狙い位置を補正する遠隔操作が行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特公昭61-044595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
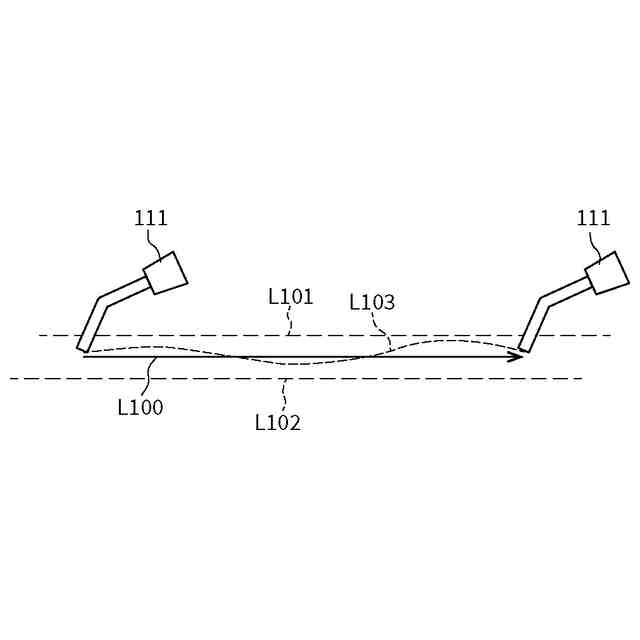
溶接においては、図6で示されるように、目標とする溶接経路L100に沿って溶接トーチ111を移動できることが理想的であるが、実際の溶接軌跡L103は、その目標とする溶接経路L100からずれることがある。そのずれの程度が、許容範囲を示す境界線L101,L102の範囲内であれば、溶接の品質に問題は生じないが、境界線L101,L102を超えるずれが発生した場合には、溶接の品質に問題が生じることになる。
【0005】
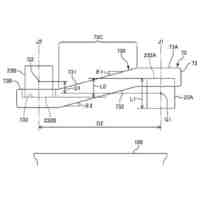
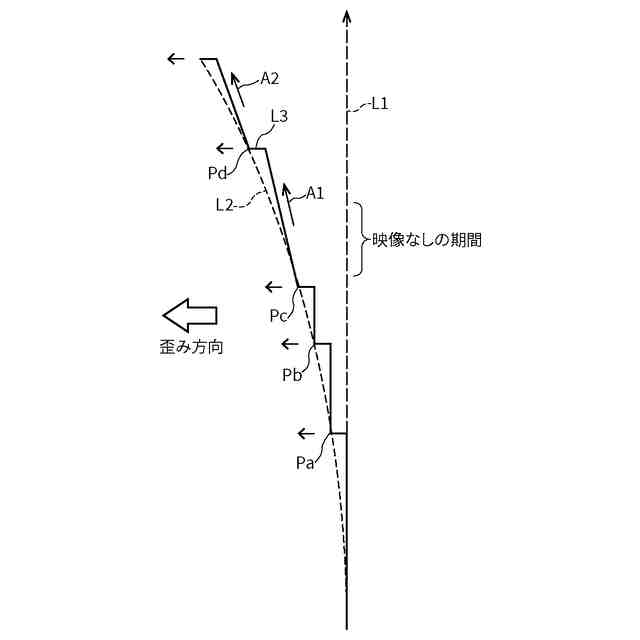
遠隔操作式の溶接ロボットシステムでは、図7で示されるように、溶接トーチの先端は、教示データによって示される教示線L1に沿って進行方向に一定の速度で移動することになる。そのような状況において、例えば、図7で示されるように、ワークの溶接部分L2が、ワークの熱歪みに応じて歪み方向に変化することがある。この変化に追従した溶接を行うため、作業者は、カメラによって撮影された映像を見ながら、図7で示される実線の矢印で示されるように、溶接トーチの狙い位置を補正する。この補正を行うことによって、溶接部分L2からの溶接の軌跡L201のずれを許容範囲内に抑えることができる。このような遠隔操作での補正を行っている状況において、例えば、通信遅延などの影響によって、映像が所定の期間だけ飛んだとすると、図7で示されるように、映像なしの期間には補正を行うことができないため、溶接トーチは教示線L1の方向に移動することになり、ワークの溶接部分L2からの溶接の軌跡L201のずれが許容範囲を超え、溶接の品質に問題が生じることになる。
【0006】
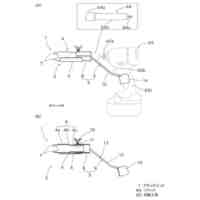
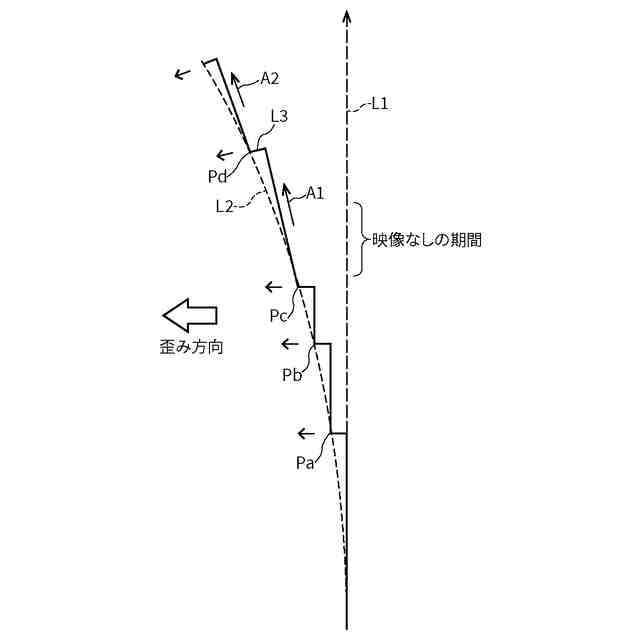
また、そのような映像なしの期間がなかったとしても、ワークの熱歪みによる溶接部分L2の変化が大きい場合には、図8の実線の矢印で示されるように、溶接の軌跡L202の補正の頻度が高くなる。また、仮に溶接の途中から熱歪みが進行せず、溶接の軌跡L202が途中から直線状になったとしても、一旦、当初の教示線L1から外れた場合には、頻繁に補正を行う必要がある。作業者は、カメラの映像のみを見ながら補正を行うため、補正の頻度が高い場合には、作業者の疲労度合いが高くなる。そのため、作業者が集中して作業できる時間が短くなり、作業者の交代要員を準備しなくてはならなくなる。このことは、熟練工が少ない状況において、大きな負担となる。
【0007】
本発明は、上記課題を解決するためになされたものであり、ワークの溶接部分と溶接トーチとのずれをより小さくすることができる遠隔操作式の溶接ロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の一態様による溶接ロボットシステムは、溶接トーチを移動させる溶接ロボットと、溶接ロボットに取り付けられており、ワークの未溶接の溶接部分を撮影するカメラと、カメラによって撮影された映像を表示する表示装置と、表示装置による映像の表示に応じて、作業者から溶接位置の補正の指示を受け付ける受付部と、教示データに基づいて溶接ロボットを制御して溶接を行わせると共に、受付部によって受け付けられた指示に応じて溶接位置を補正するための制御を行うロボット制御部と、溶接ロボットによる溶接の軌跡上の複数の点の位置を蓄積する蓄積部と、蓄積部によって蓄積された複数の点の位置を用いて溶接経路を予測する予測部と、を備え、ロボット制御部は、予測部によって予測された溶接経路に沿って溶接トーチが移動するように溶接ロボットを制御する、ものである。
【0009】
このような構成により、ワークの未溶接の溶接部分が熱歪みによって変化したとしても、予測された溶接経路に沿って溶接トーチを移動させることによって、ワークの未溶接の溶接部分と溶接トーチとのずれを小さくすることができる。その結果、作業者が行う遠隔での補正の頻度が少なくなり、作業者の疲労を低減することができる。そのため、例えば、より少ない作業者によって、遠隔での補正を行うことができるようになる。また、予測された溶接経路に沿って溶接トーチを移動させることによって、仮に通信遅延などによって、所定の期間だけ映像が飛ぶことがあっても、その間に溶接トーチのずれが許容範囲を超える可能性を低減することができる。すなわち、通信遅延に対してよりロバストな溶接ロボットシステムを提供することができる。
【0010】
また、本発明の一態様による溶接ロボットシステムでは、予測部は、複数の点と、所定の線形状の近似線との差に応じた目的関数を最適化するように近似線の位置を特定し、特定した近似線の位置に応じた溶接経路を予測してもよい。
このような構成により、溶接の軌跡上の複数の点にフィットした溶接経路を予測することができるようになる。特に、溶接の軌跡上の最新の点のみを用いて近似線を予測した場合には、仮に作業者が誤って必要以上に大きな補正を行ったようなときに、予測された近似線が、本来の予測すべき近似線から大きくずれてしまう可能性もある。一方、溶接の軌跡上の複数の点を用いて近似線の位置を特定することによって、その複数の点からの誤差を最小にする近似線の位置を特定することができ、一部の点の誤差に過敏にならず、時間変化の滑らかな近似線の特定が可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
11日前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボットシステム
5日前
株式会社ダイヘン
搬送装置
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
8日前
トヨタ自動車株式会社
カプラ接続治具
15日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
6日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
積水ハウス株式会社
フィルム除去具
27日前
株式会社マキタ
電気機器
1か月前
ホシデン株式会社
分解用治具
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
6日前
株式会社リコー
多関節ロボット
2か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
21日前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
11日前
コネクテッドロボティクス株式会社
保持システム
29日前
セイコーエプソン株式会社
ロボット
5日前
セイコーエプソン株式会社
ロボット
1日前
タイガー産業株式会社
アタッチメント
19日前
セコム株式会社
ロボット
5日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
川崎重工業株式会社
作業設備
1か月前
北越メタル株式会社
鉄筋保持具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ