TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030644
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136129
出願日
2023-08-24
発明の名称
移動システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B62D
6/00 20060101AFI20250228BHJP(鉄道以外の路面車両)
要約
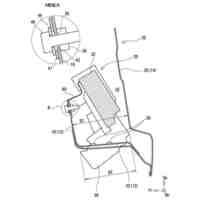
【課題】傾斜角度が大きい経路上を移動可能な移動システムを実現する。
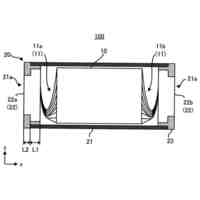
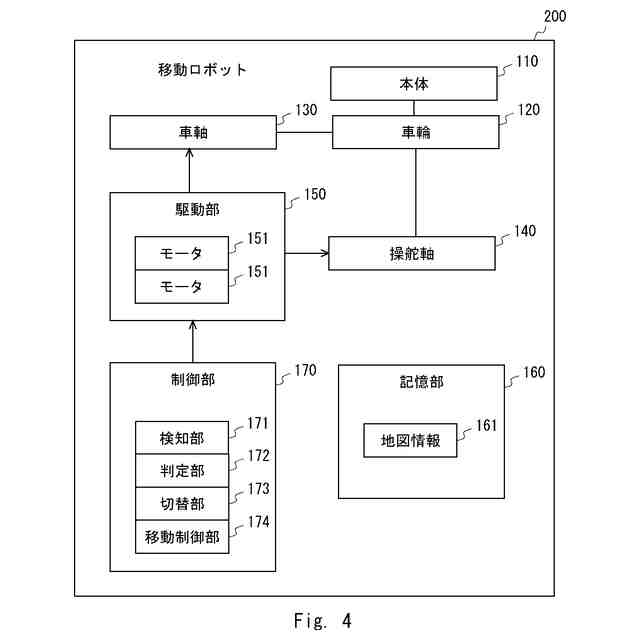
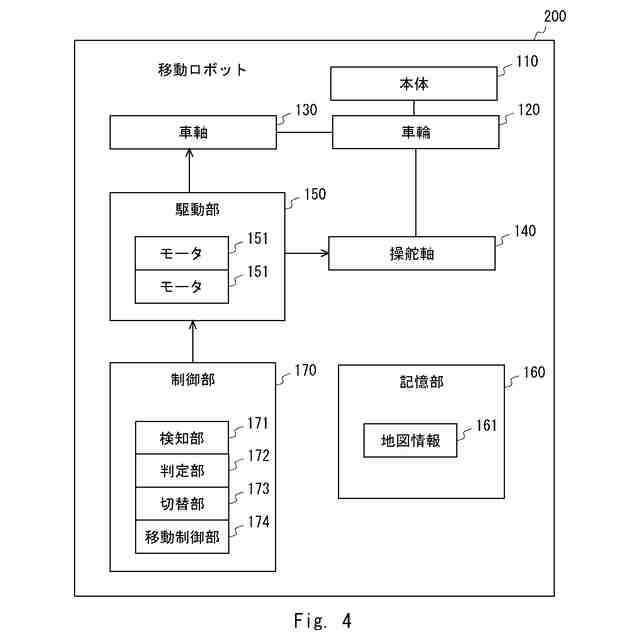
【解決手段】本開示の一形態に係る移動ロボット200は、上下方向に延びる操舵軸140周りに旋回可能な車輪を備える。移動ロボット200の上方から見て、操舵軸140は、車輪120の接地点30と異なる位置に設けられる。移動ロボット200は、操舵軸140を基準として接地点30が高い位置に位置した状態で移動ロボット200が傾斜経路上を移動するように、操舵軸140周りに車輪を旋回させるための制御を行う制御部170を備える。
【選択図】図4
特許請求の範囲
【請求項1】
上下方向に延びる操舵軸周りに旋回可能な車輪を備えた移動システムであって、
前記移動システムの上方から見て、前記操舵軸は、前記車輪の接地点と異なる位置に設けられ、
前記操舵軸を基準として前記接地点が高い位置に位置した状態で前記移動システムが傾斜経路上を移動するように、前記操舵軸周りに前記車輪を旋回させるための制御を行う制御部
を備えた移動システム。
続きを表示(約 470 文字)
【請求項2】
前記制御部は、
地図情報に基づいて前記移動システムが前記傾斜経路に進入することを検知する検知部と、
前記移動システムが前記傾斜経路に進入する場合、前記車輪を前記操舵軸周りに旋回させる旋回動作を行う必要があるか否かを判定する判定部と
を備える請求項1に記載の移動システム。
【請求項3】
前記制御部は、
前記判定部の判定結果が肯定的である場合、前記移動システムの移動モードを、前記接地点が前記操舵軸よりも移動方向前方に位置するプルモードに切り替える切替部
を備える請求項2に記載の移動システム。
【請求項4】
前記移動システムの重心位置が前記操舵軸よりも前方に位置する場合、上り勾配の前記傾斜経路上を移動する際に本体の後方向に進む
請求項1または2に記載の移動システム。
【請求項5】
前記車輪を車軸周りに回転させ、かつ、前記車輪を前記操舵軸周りに旋回させる干渉駆動機構を備える請求項1または2に記載の移動システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1は、車軸と操舵軸を有し、車軸が操舵軸に対してずれて配置される車両を開示している。
【先行技術文献】
【特許文献】
【0003】
特許第7198445号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の車両が、傾斜角度が大きい経路上を移動する場合、重力によって車輪が操舵軸周りに旋回してしまい、車両が移動できなくなる恐れがあった。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、傾斜角度が大きい経路上を移動可能な移動システムを実現する。
【課題を解決するための手段】
【0006】
本開示の一態様の移動システムは、
上下方向に延びる操舵軸周りに旋回可能な車輪を備えた移動システムであって、
前記移動システムの上方から見て、前記操舵軸は、前記車輪の接地点と異なる位置に設けられ、
前記操舵軸を基準として前記接地点が高い位置に位置した状態で前記移動システムが傾斜経路上を移動するように、前記操舵軸周りに前記車輪を旋回させるための制御を行う制御部
を備える。
【発明の効果】
【0007】
本開示によれば、傾斜角度が大きい経路上を移動可能な移動システムを実現することができる。
【図面の簡単な説明】
【0008】
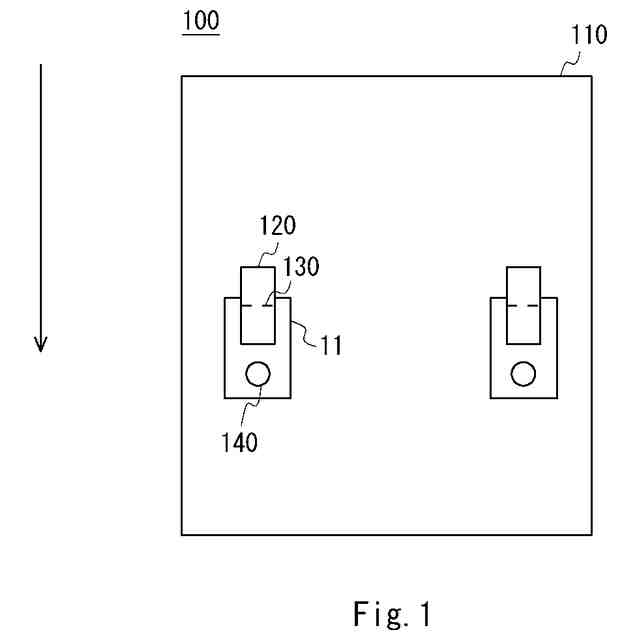
参考例にかかる移動ロボットの下面を示す説明図である。
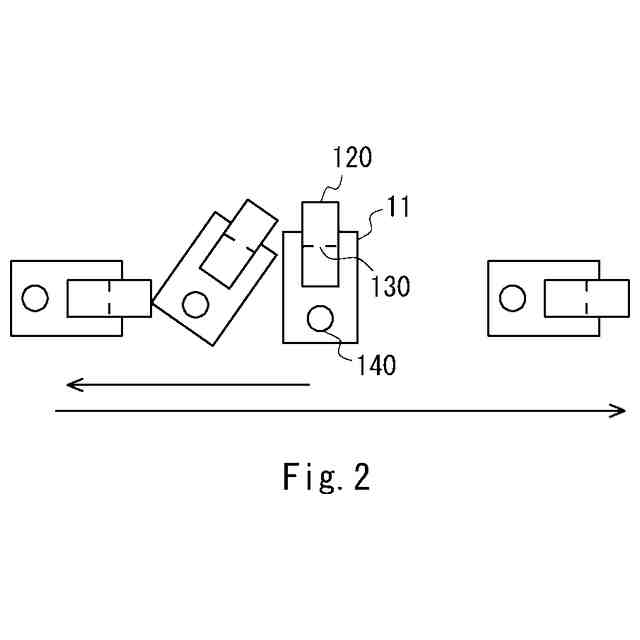
参考例にかかる車輪の動作を示す説明図である。
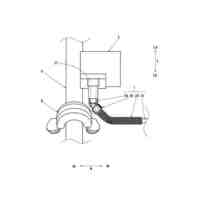
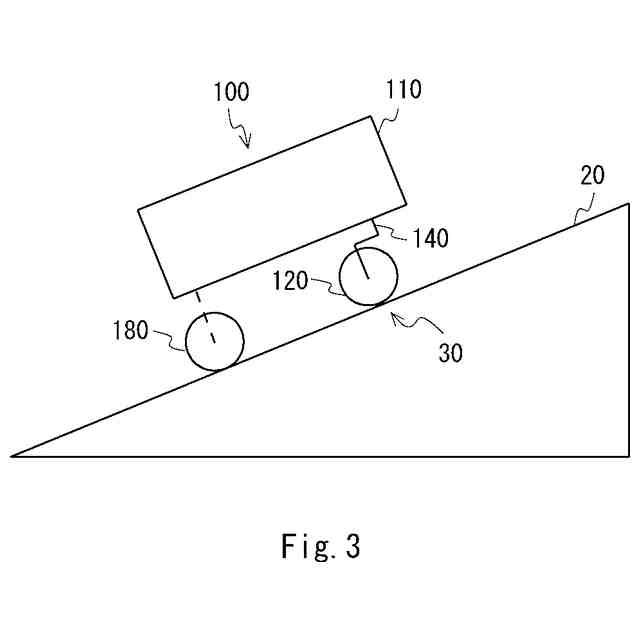
参考例にかかる移動ロボットが傾斜面上を移動する状態を示す説明図である。
実施形態1にかかる移動ロボットの構成を示すブロック図である。
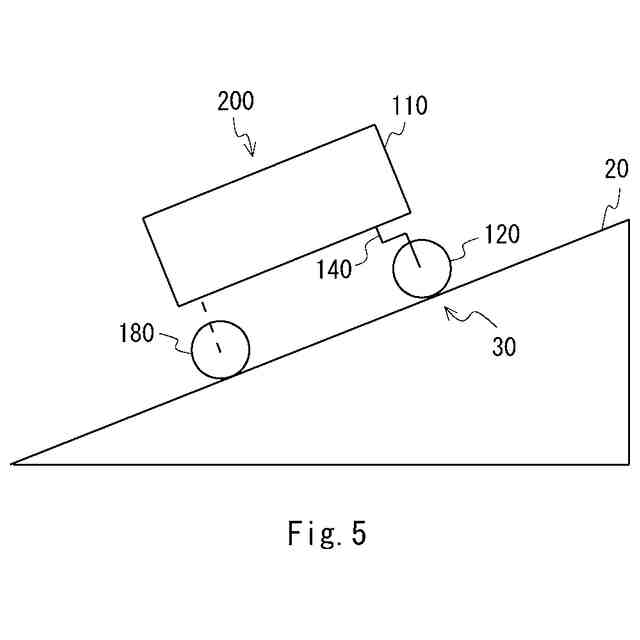
実施形態1にかかる移動ロボットが傾斜面上を移動する状態を示す説明図である。
実施形態1の変形例にかかる移動ロボットが傾斜面上を移動する状態を示す説明図である。
【発明を実施するための形態】
【0009】
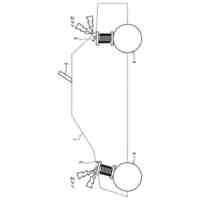
参考例
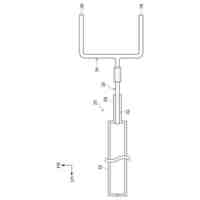
図1を参照して参考例にかかる移動ロボット100について説明する。図1は、移動ロボット100の下面を示す説明図である。移動ロボット100は、本体110、車輪120、車軸130、および操舵軸140を備えている。
【0010】
本体110は、車輪120を駆動するモータ(不図示)やモータに制御信号を送信する制御装置などを収容する。本体110は、移動ロボット100によって搬送される荷物を収容する収容部をさらに備えていてもよい。移動ロボット100は、搬送ロボットであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
熱管理回路
1日前
トヨタ自動車株式会社
熱管理回路
1日前
トヨタ自動車株式会社
充電システム
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
排気システム
1日前
トヨタ自動車株式会社
電源システム
今日
トヨタ自動車株式会社
電池の製造方法
1日前
トヨタ自動車株式会社
電池モジュール
1日前
トヨタ自動車株式会社
電力供給システム
今日
トヨタ自動車株式会社
内燃機関制御装置
今日
トヨタ自動車株式会社
電池及びその製造方法
1日前
トヨタ自動車株式会社
希土類磁石の製造方法
1日前
トヨタ自動車株式会社
希土類磁石の製造方法
1日前
トヨタ自動車株式会社
燃料電池の冷却システム
1日前
トヨタ自動車株式会社
正極活物質及び水系電池
今日
トヨタ自動車株式会社
ギヤ成形用砥石の成形方法
今日
トヨタ自動車株式会社
フライトサービスシステム
1日前
トヨタ自動車株式会社
車両のサスペンション装置
今日
トヨタ自動車株式会社
樹脂シート接合体の製造方法
1日前
トヨタ自動車株式会社
水素充填装置、水素充填方法
今日
トヨタ自動車株式会社
バックドアロックの取付構造
今日
トヨタ自動車株式会社
車両部品の配置検討支援システム
今日
トヨタ自動車株式会社
電池の製造方法及び電池の製造装置
1日前
トヨタ自動車株式会社
通信システム、制御装置、及び、通信方法
今日
トヨタ自動車株式会社
運転支援装置、運転支援方法及びプログラム
今日
トヨタ自動車株式会社
二次電池
今日
古河電気工業株式会社
ハーネス配索構造及び連結部材
1日前
トヨタ自動車株式会社
車両プラットフォーム、自動運転システム、および車両制御インターフェースボックス
5日前
個人
発音装置
1か月前
個人
折り畳み自転車
4か月前
個人
電動モビリティ
1か月前
個人
自転車用傘捕捉具
5か月前
個人
体重掛けリフト台車
4か月前
個人
自転車用荷台
8か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ