TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029935
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134847
出願日
2023-08-22
発明の名称
粒子初期化装置、粒子初期化方法、及び粒子初期化プログラム
出願人
沖電気工業株式会社
代理人
弁理士法人きさ特許商標事務所
主分類
G01S
15/66 20060101AFI20250228BHJP(測定;試験)
要約
【課題】目標運動解析における推定精度の低下を抑制する粒子初期化装置、粒子初期化方法、及び粒子初期化プログラムを提供する。
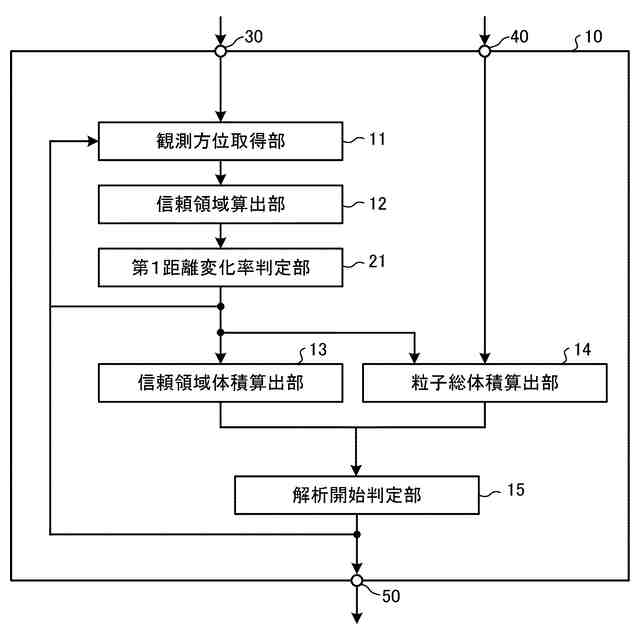
【解決手段】粒子初期化装置は、距離変化率を含む修正極座標において、粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化装置であって、観測された目標の方位についての観測方位情報を取得する観測方位取得部と、観測方位情報を用いて粒子を散布する信頼領域を算出する信頼領域算出部と、距離変化率の妥当性に基づいて、観測方位情報の追加取得を行うか否かを判定する距離変化率判定部と、を備える。
【選択図】図11
特許請求の範囲
【請求項1】
距離変化率を含む修正極座標において、粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化装置であって、
観測された目標の方位についての観測方位情報を取得する観測方位取得部と、
前記観測方位情報を用いて前記粒子を散布する信頼領域を算出する信頼領域算出部と、
前記距離変化率の妥当性に基づいて、前記観測方位情報の追加取得を行うか否かを判定する距離変化率判定部と、を備える
粒子初期化装置。
続きを表示(約 1,400 文字)
【請求項2】
前記距離変化率判定部は、前記距離変化率の動き得る区間の妥当性に基づいて、前記観測方位情報の追加取得を行うか否かを判定する
請求項1に記載の粒子初期化装置。
【請求項3】
前記距離変化率判定部は、
方位、方位変化、及び前記距離変化率の推定値に基づくフィッシャーの情報行列の逆行列の最大固有値を算出し、
前記最大固有値に基づいて前記距離変化率の前記動き得る区間を算出し、
前記該距離変化率の前記動き得る区間と閾値とを比較することで、前記距離変化率の前記動き得る区間の妥当性を判定する
請求項2に記載の粒子初期化装置。
【請求項4】
前記距離変化率判定部は、
方位、方位変化、及び前記距離変化率の推定値に関するフィッシャーの情報行列から前記信頼領域の範囲を算出し、
前記信頼領域の範囲に基づいて、前記信頼領域の前記距離変化率方向の最大範囲を算出し、
前記信頼領域の前記距離変化率方向の前記最大範囲と閾値とを比較することで、前記距離変化率の前記動き得る区間の妥当性を判定する
請求項2に記載の粒子初期化装置。
【請求項5】
前記距離変化率判定部は、前記距離変化率の前記観測方位情報の増加に対する変化率の妥当性に基づいて、前記観測方位情報の追加取得を行うか否かを判定する
請求項1に記載の粒子初期化装置。
【請求項6】
前記距離変化率判定部は、
前記観測方位情報の増加前後の前記信頼領域の体積の変化率を計算し、
前記信頼領域の体積の変化率と閾値とを比較することで、前記距離変化率の前記観測方位情報の増加に対する変化率の妥当性を判定する
請求項5に記載の粒子初期化装置。
【請求項7】
前記観測方位情報の増加に対する前記信頼領域の体積の変化から前記信頼領域の収束性を判定する収束性判定部と、
前記信頼領域の収束性がのぞめない場合において、前記粒子の総体積、及び前記信頼領域に基づいて、必要粒子数を算出する必要粒子数算出部と、
前記信頼領域の収束性がのぞめない場合において、前記信頼領域に対して前記必要粒子数の前記粒子を散布する粒子散布部と、を更に備える
請求項1~6の何れか1項に記載の粒子初期化装置。
【請求項8】
前記信頼領域に対して散布した前記粒子に対して真の状態量に対する可能性評価値を付与する評価値付与部と、
前記可能性評価値に基づいて、前記粒子の数を低減させる粒子除去部と、を更に備える
請求項7に記載の粒子初期化装置。
【請求項9】
前記評価値付与部は、
前記粒子の前記状態量をデカルト座標へ変換し、
前記デカルト座標での前記粒子の速度成分に基づいて、前記粒子に前記可能性評価値を付与する
請求項8に記載の粒子初期化装置。
【請求項10】
前記評価値付与部は、
前記信頼領域の分布の統計的性質と、前記粒子の前記信頼領域における位置とに基づいて、前記粒子に前記可能性評価値を付与する
請求項8に記載の粒子初期化装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、特に粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化装置、粒子初期化方法、及び粒子初期化プログラムに関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、ソーナー等の分野においては、観測値から目標の運動を予測することが行われている。目標の運動を予測するためには、目標の位置および速度を推定する必要があり、そのような目標の運動を解析する方法として、粒子フィルタを用いた方法が提案されている。粒子フィルタを用いた目標運動解析は、目標の位置および速度を含む状態を、粒子で表現する方法である。この目標運動解析では、まず、様々な目標の状態を有する粒子が大量に生成される。それぞれの粒子は、推定したい目標の状態と同じように速度、及び位置の状態を有しており、観測値に見合う粒子を増やし、観測値に見合わない粒子を減らすように処理が行われる。粒子の密度が高い地点は、目標が存在する可能性が高いことを示すため、目標が存在する可能性の高い場所に粒子を集めることにより、目標の位置および速度を推定することができる。
【0003】
ところで、限られた粒子数の下で粒子フィルタを用いた目標運動解析を行うためには、目標運動解析を開始する時点で目標の真の状態量の周りに妥当な範囲で粒子を散布する(粒子を初期化する)必要がある。例えば、非特許文献1~4には、各種の初期化方法が開示されている。
【先行技術文献】
【非特許文献】
【0004】
Thomas Brehard, Jean-Pierre Le Cadre, Initialization of Particle Filter and Posterior Cramer-Rao Bound for Bearings-Only Tracking in Modified Polar Coordinate System, [Research Report] RR-5074, INRIA, 2004
Jean Dezert and Christian Musso, An Efficient Method for Generating Points Uniformly Distributed in Hyperellipsoids, Proceedings of the Workshop on Estimation, Tracking and Fusion: A Tribute to Yaakov Bar-Shalom. 2001.
Y. Bar-Shalom et al., “Estimation with Applications to Tracking and Navigation,” John Wiley and Sons, inc. 2001, PP269-270
Thomas Brehard, Jean-Pierre Le Cadre, Initialization of Particle Filter and Posterior Cramer-Rao Bound for Bearings-Only Tracking in Modified Polar Coordinate System, [Research Report] RR-5074, INRIA, 2004
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の粒子の初期化方法においては、雑音による観測誤差が影響し、目標の真の状態量の周りに粒子が存在しなくなることが起こり得る。粒子フィルタを用いた推定において初期化時に目標の真の状態量の周りに粒子が存在しなくなると、推定精度に致命的な影響を与えてしまうという問題がある。
【0006】
本発明は、上記のような課題を解決するためになされたもので、目標運動解析における推定精度の低下を抑制する粒子初期化装置、粒子初期化方法、及び粒子初期化プログラムを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明に係る粒子初期化装置は、距離変化率を含む修正極座標において、粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化装置であって、観測された目標の方位についての観測方位情報を取得する観測方位取得部と、観測方位情報を用いて粒子を散布する信頼領域を算出する信頼領域算出部と、距離変化率の妥当性に基づいて、観測方位情報の追加取得を行うか否かを判定する距離変化率判定部と、を備える。
【0008】
本発明に係る粒子初期化方法は、距離変化率を含む修正極座標において、粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化方法であって、観測された目標の方位についての観測方位情報を取得する観測方位取得ステップと、観測方位情報を用いて粒子を散布する信頼領域を算出する信頼領域算出ステップと、距離変化率の妥当性に基づいて、観測方位情報の追加取得を行うか否かを判定する距離変化率判定ステップと、を備える。
【0009】
本発明に係る粒子初期化プログラムは、距離変化率を含む修正極座標において、粒子フィルタを用いた目標の運動解析を行う際に粒子を初期化する粒子初期化方法を粒子初期化装置のプロセッサに実行させる粒子初期化プログラムであって、粒子初期化方法は、観測された目標の方位についての観測方位情報を取得する観測方位取得ステップと、観測方位情報を用いて粒子を散布する信頼領域を算出する信頼領域算出ステップと、距離変化率の妥当性に基づいて、観測方位情報の追加取得を行うか否かを判定する距離変化率判定ステップと、を備える。
【発明の効果】
【0010】
以上のように、本発明によれば、距離変化率判定部は、距離変化率の妥当性に基づいて、観測方位情報の追加取得を行うか否かを判定する。このため、雑音による観測誤差が発生しても、観測値数を増やして、粒子の総体積が信頼領域の体積を真に上回った場合にのみ粒子フィルタの初期化を実施することができる。よって、本発明の粒子初期化装置によれば、目標の真の状態量の周りに粒子を散布して、目標運動解析における推定精度の低下を抑制することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
1か月前
甲神電機株式会社
漏電検出器
1か月前
甲神電機株式会社
電流センサ
1か月前
甲神電機株式会社
電流検出器
1か月前
株式会社大真空
センサ
10日前
ユニパルス株式会社
ロードセル
1か月前
株式会社高橋型精
採尿具
1か月前
東レ株式会社
液体展開用シート
25日前
株式会社トプコン
測量装置
1か月前
株式会社トプコン
植物センサ
21日前
株式会社ミツトヨ
エンコーダ
4日前
日本FC企画株式会社
特性試験装置
6日前
アズビル株式会社
湿度センサ
18日前
日本碍子株式会社
ガスセンサ
3日前
アズビル株式会社
圧力センサ
3日前
キヤノン電子株式会社
サーボ加速度計
25日前
キヤノン電子株式会社
サーボ加速度計
25日前
株式会社東芝
センサ
17日前
株式会社小野測器
回転計測装置
17日前
キヤノン電子株式会社
サーボ加速度計
25日前
株式会社ミツトヨ
変位測定装置
17日前
株式会社クボタ
作業車両
24日前
株式会社東芝
センサ
3日前
エスペック株式会社
環境試験装置
3日前
アズビル株式会社
検査用プローブ
11日前
豊田合成株式会社
表示装置
1か月前
個人
レーザージャイロ応用重力場計測装置
5日前
株式会社ノーリツ
温度センサ取付具
4日前
古河電気工業株式会社
漏水検知構造
4日前
トヨタ自動車株式会社
画像検査装置
1か月前
トヨタ自動車株式会社
異音解析方法
17日前
積水ハウス株式会社
測定治具
3日前
株式会社ノーリツ
温度センサ取付具
4日前
トヨタ自動車株式会社
NVH解析装置
17日前
株式会社大真空
センサ及びその製造方法
1か月前
日鉄テクノロジー株式会社
衝突試験装置
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ