TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025024901
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129273
出願日
2023-08-08
発明の名称
駐車支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/06 20060101AFI20250214BHJP(車両一般)
要約
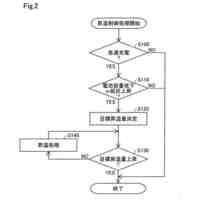
【課題】自車両を縦列駐車させた場合に、他者の通行を妨げることが抑制されるように自車両の横方向位置を修正することができる駐車支援装置を提供する。
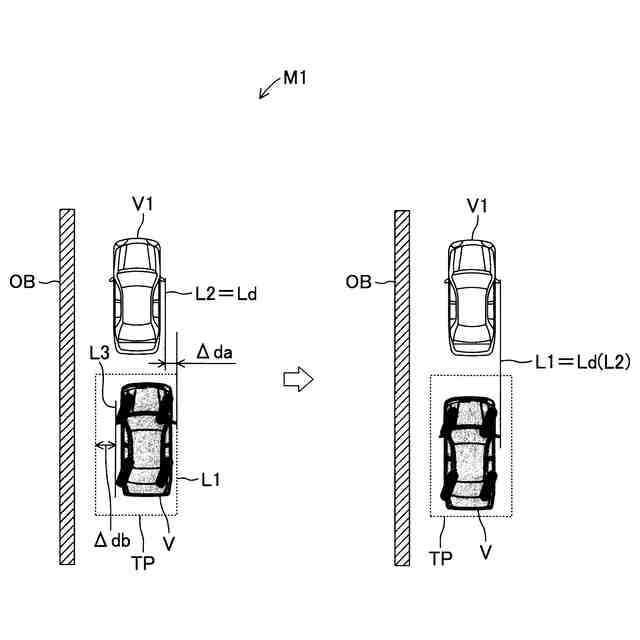
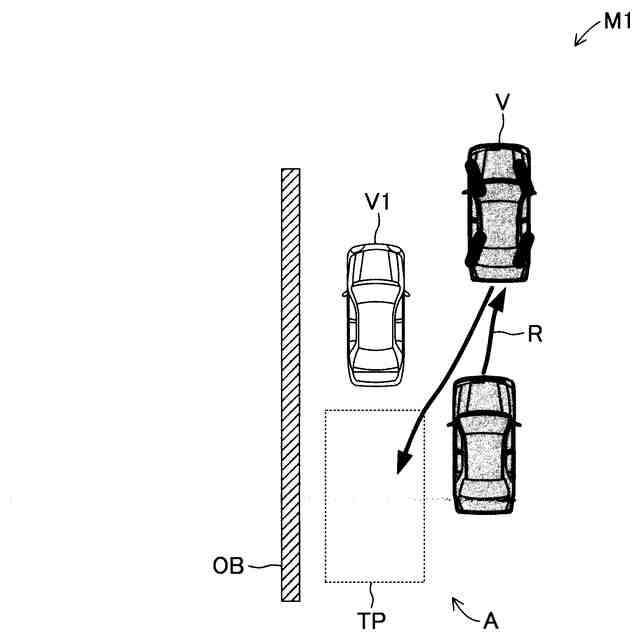
【解決手段】駐車支援装置は、周囲に存在する物標情報を取得する周辺センサと、前記物標情報に基づいて、自車両を縦列駐車させるための運転操作を支援するプロセッサと、を備える。前記プロセッサは、平面視において、自車両が前記他車両V1の後方又は前方に位置し、且つ自車両と前記他車両V1とが平行であって、さらに、自車両が前記他車両V1に対し、前記通路の他端側へ突出していることを検知した場合に、自車両の前輪及び後輪が同相操舵されるように自車両のステアリング装置を制御しつつ自車両の駆動装置を制御して自車両を斜め前方又は斜め後方へ平行移動させることにより、前記他車両V1に対する自車両の突出量Δdaを減少させる駐車位置修正処理を実行する。
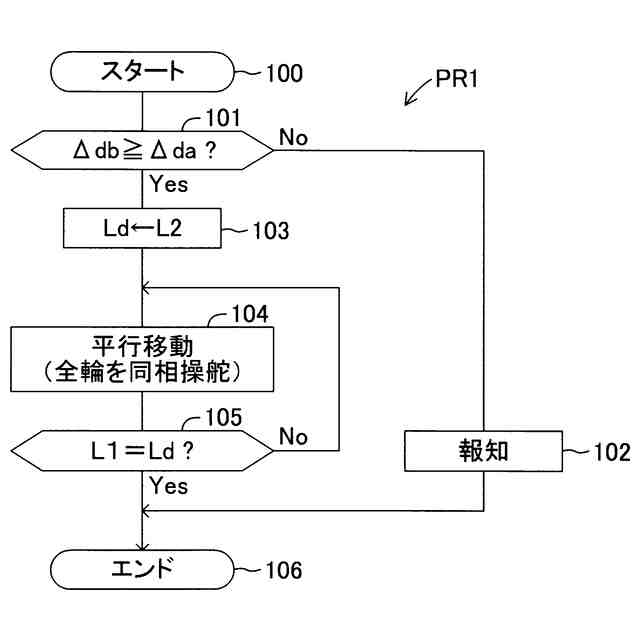
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周囲に存在する物標に関する物標情報を取得する周辺センサと、
前記物標情報に基づいて、通路の幅方向における一端部に沿うように駐車されている他車両の後方又は前方に自車両を縦列駐車させるための運転操作を支援するプロセッサと、
を備えた駐車支援装置であって、
前記プロセッサは、平面視において、自車両が前記他車両の後方又は前方に位置し、且つ自車両と前記他車両とが平行であって、さらに、自車両が前記他車両に対し、前記通路の他端側へ突出していることを検知した場合に、自車両の前輪及び後輪が同相操舵されるように自車両のステアリング装置を制御しつつ自車両の駆動装置を制御して自車両を斜め前方又は斜め後方へ平行移動させることにより、前記他車両に対する自車両の突出量を減少させる駐車位置修正処理を実行する、ように構成された駐車支援装置。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載の駐車支援装置において、
前記駐車位置修正処理は、
平面視において、自車両の一方の側面部であって、前記通路の幅方向における他端側の側面部における所定点を通り且つ自車両の前後方向に平行な第一ラインと、前記他車両の一方の側面部であって、前記通路の前記他端側の側面部における所定点を通り且つ当該他車両の前後方向に平行な第二ラインとが平行であり、且つ前記第一ラインが前記第二ラインに対して前記通路の他端側に位置していることを検知した場合に、前記第一ライン及び前記第二ラインに平行であり且つ前記第一ラインに対して前記通路の一端側に位置する所定のラインを目標ラインとして設定する目標ライン設定処理と、
自車両の前輪及び後輪が同相操舵されるように自車両のステアリング装置を制御しつつ自車両の駆動装置を制御して自車両を斜め前方又は斜め後方へ平行移動させることにより、前記第一ラインを前記目標ラインに一致させる平行移動処理と、
を含む、駐車支援装置。
【請求項3】
請求項2に記載の駐車支援装置において、
前記プロセッサは、前記他車両の前記第二ラインを前記目標ラインとして設定する、ように構成された駐車支援装置。
【請求項4】
請求項2に記載の駐車支援装置において、
前記プロセッサは、自車両の他方の側面部と障害物との距離が閾値に一致する位置に自車両が駐車された状態における自車両の前記第一ラインを前記目標ラインとして設定する、ように構成された駐車支援装置。
【請求項5】
請求項2に記載の駐車支援装置において、
前記プロセッサは、前記第一ラインが、自車両の前方に駐車された第一他車両の前記第二ラインに平行であって、且つ前記自車両の後方に駐車された第二他車両の前記第二ラインに平行であり、さらに、前記第一ラインが前記第一他車両及び前記第二他車両の前記第二ラインに対して前記通路の他端側に位置する場合に、前記第一他車両の前記第二ラインと前記第二他車両の前記第二ラインとの中間に位置するラインを前記目標ラインとして設定する、ように構成された、駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両を縦列駐車させる運転操作を支援する駐車支援装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
自車両を駐車させる運転操作を支援する駐車支援装置が提案されている(例えば、下記特許文献1を参照。)。この駐車支援装置(以下、「従来装置」と称呼する。)は、車載センサ、駆動装置、制動装置、ステアリング装置、及びプロセッサを含む。ステアリング装置は、自車両の前輪の舵角と後輪の舵角を独立して変更する機構を含む。プロセッサは、車載センサから取得した情報に基づいて、平面視における自車両の車幅方向中央部を通る中心線と駐車スポットの枠線の長辺とが平行であることを検知すると、同情報に基づいて、自車両の左側面と当該枠線の左側の長辺との距離(左マージン)、及び自車両の右側面と当該枠線の右側の長辺との距離(右マージン)を取得する。プロセッサは、左マージンと右マージンとが異なる場合(自車両が駐車スポットの左側又は右側に偏っている場合)、全輪の操舵舵方向が同一(同相)であって且つ全輪の舵角が同一になるようにステアリング装置を制御する(同相操舵)。これにより、自車両を斜め前方又は斜め後方へ平行移動させることができるようになる。すなわち、従来装置によれば、自車両の中心線と枠線の長辺とが平行である状態を維持したまま、駐車スポットの幅方向における中央部に自車両を移動させることができる。これにより、運転者は、左マージンと右マージンとが同一になるように自車両の位置(横方向位置)を容易に修正できる。
【先行技術文献】
【特許文献】
【0003】
特開2011‐225019号公報
【発明の概要】
【0004】
従来装置は、駐車スポットの枠線に対する自車両の側面部の位置及び姿勢に基づいて駐車支援制御(全輪の舵角制御)を実行している。しかし、駐車スポットの枠線ではなく、駐車されている他車両に対する自車両の位置及び姿勢に基づいて駐車支援制御を実行することが好ましい場合がある。その一例として、自車両を縦列駐車させるシーンを挙げることができる。例えば、通路(道路)の左端に沿って駐車されている他車両の直後の領域に自車両を縦列駐車させた際、自車両の右側面が当該他車両の右側面に対して右方に位置(突出)していたとすると、他者(歩行者、車両など)の通行を妨げる虞がある。そのため、この場合、他車両の右側面に対する自車両の右側面の突出量ができるだけ小さくなるように当該他車両に対する自車両の位置(横方向位置)を修正することが好ましい。従来装置は、通路の左端又は右端に駐車されている他車両の後方又は前方に自車両を縦列駐車させるシーンにおいて、当該他車両の横方向位置に対する自車両の横方向位置を自動的に修正する機能を有していない。
【0005】
本発明の目的の一つは、通路(道路)の左端又は右端に沿って駐車されている他車両の後方又は前方に自車両を縦列駐車させた場合に、他者の通行を妨げることが抑制されるように自車両の横方向位置を修正することができる駐車支援装置を提供することにある。
【0006】
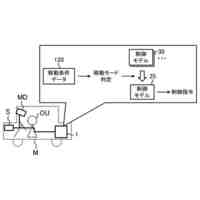
上記課題を解決するために、本発明の駐車支援装置(1)は、
自車両(V)の周囲に存在する物標に関する物標情報を取得する周辺センサ(20)と、
前記物標情報に基づいて、通路の幅方向における一端部に沿うように駐車されている他車両(V1)の後方又は前方に自車両を縦列駐車させるための運転操作を支援するプロセッサ(10)と、
を備える。
前記プロセッサは、平面視(M1)において、自車両が前記他車両の後方又は前方に位置し、且つ自車両と前記他車両とが平行であって、さらに、自車両が前記他車両に対し、前記通路の他端側へ突出していることを検知した場合に、自車両の前輪及び後輪が同相操舵されるように自車両のステアリング装置を制御しつつ自車両の駆動装置を制御して自車両を斜め前方又は斜め後方へ平行移動させることにより、前記他車両に対する自車両の突出量を減少させる駐車位置修正処理を実行するように構成される。なお、本発明において、「平行」は、「一致」を含む概念である。
【0007】
通路の左端(右端)に沿うように駐車されている他車両の後方又は前方に自車両を縦列駐車させた際、自車両と当該他車両とが平行ではあるが、当該他車両に対する自車両の横方向位置が好ましくない場合がある。すなわち、自車両の右側面(左側面)が当該他車両の右側面(左側面)に対して右方(左方)へ突出している場合がある。この場合、本発明に係る駐車支援装置は、自車両の全輪を同相操舵しつつ駆動装置を制御して、自車両を斜め前方又は斜め後方へ平行移動させて自車両の横方向位置を自動的に修正する。すなわち、この過程において、自車両と他車両とが平行である状態を維持される。よって、本発明によれば、自車両を転回させる方向を切り替えながら自車両を前進及び後退を繰り返して自車両の横方向位置を修正する場合に比べて、自車両の横方向位置を効率良く修正できる。これにより、他者の通行を妨げることが抑制される。
【0008】
本発明の一態様に係る駐車支援装置において、
前記駐車位置修正処理は、
平面視(M1)において、自車両の一方の側面部であって、前記通路の幅方向における他端側の側面部における所定点を通り且つ自車両の前後方向に平行な第一ライン(L1)と、前記他車両の一方の側面部であって、前記通路の前記他端側の側面部における所定点を通り且つ当該他車両の前後方向に平行な第二ライン(L2)とが平行であり、且つ前記第一ラインが前記第二ラインに対して前記通路の他端側に位置していることを検知した場合に、前記第一ライン及び前記第二ラインに平行であり且つ前記第一ラインに対して前記通路の一端側に位置する所定のラインを目標ライン(Ld)として設定する目標ライン設定処理と、
自車両の前輪及び後輪が同相操舵されるように自車両のステアリング装置を制御しつつ自車両の駆動装置を制御して自車両を斜め前方又は斜め後方へ平行移動させることにより、前記第一ラインを前記目標ラインに一致させる平行移動処理と、
を含む。
【0009】
これによれば、例えば、自車両を通路の左端に縦列駐車させるシーンにおいて、自車両の右側面部が他車両の右側面部に対して右方へ突出していた場合に、自車両の右端のライン(第一ライン)が左方へ平行移動される。
【0010】
本発明の一態様に係る駐車支援装置において、
前記プロセッサは、前記他車両の前記第二ラインを前記目標ラインとして設定する、ように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
ロータ
16日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
単電池
8日前
トヨタ自動車株式会社
接合装置
2日前
トヨタ自動車株式会社
充電装置
8日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
連結車両
15日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
充電方法
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
切替装置
8日前
トヨタ自動車株式会社
切替装置
8日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
分離装置
2日前
トヨタ自動車株式会社
連結構造
5日前
トヨタ自動車株式会社
電動車両
16日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
熱管理回路
15日前
トヨタ自動車株式会社
レーダ装置
1日前
トヨタ自動車株式会社
高圧タンク
16日前
トヨタ自動車株式会社
モータ装置
16日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
燃圧センサ
16日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
樹脂溶解装置
1日前
トヨタ自動車株式会社
異音解析方法
1日前
トヨタ自動車株式会社
自動運転装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
異常判定装置
8日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ