TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019460
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123081
出願日
2023-07-28
発明の名称
電動機振動モデル生成装置、電動機診断システム及び電動機診断プログラム
出願人
株式会社TMEIC
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G01M
99/00 20110101AFI20250131BHJP(測定;試験)
要約
【課題】電動機の異常を検知する精度を向上させる。
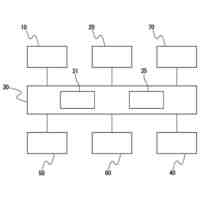
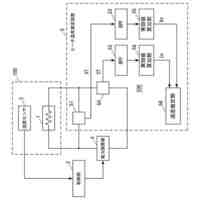
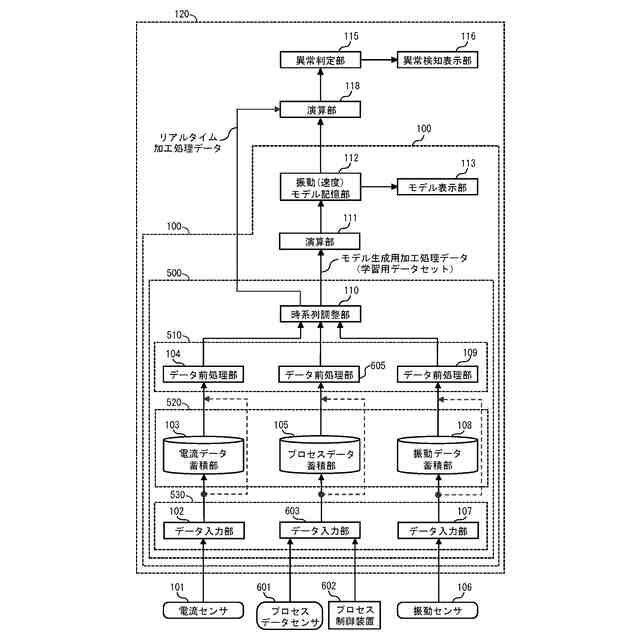
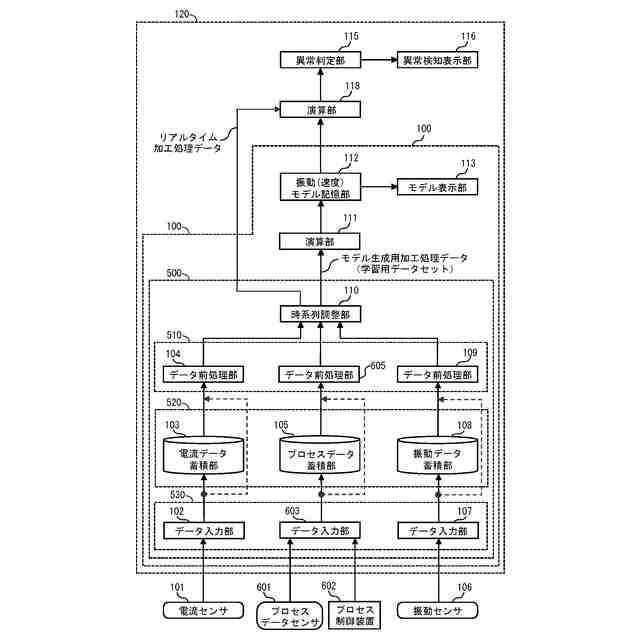
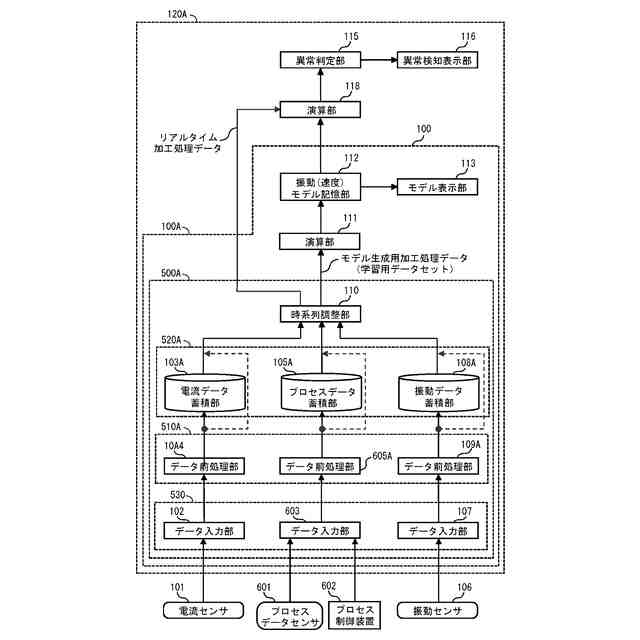
【解決手段】電動機振動モデル生成装置100は、電流データ前処理部104、振動データ前処理部109、時系列調整部110、第1演算処理部111を備える。電流データ前処理部104は、電動機から取得した入力電流データから複数の種類の特徴量を抽出し、入力電流データの取得時刻に紐付けて前処理電流データとして出力する。振動データ前処理部109は、電動機から取得した振動データから複数の種類の特徴量を抽出し、振動データの取得時刻に紐付けて前処理振動データとして出力する。時系列調整部110は、前処理電流データと前処理振動データとを同一時刻に取得されたデータとみなされるように時系列を調整して出力する。第1演算処理部111は、時系列調整部110の出力から学習用データセットを生成し、学習用データセットを用いて電動機振動モデルを学習し、学習済み電動機振動モデルを保存する。
【選択図】図1
特許請求の範囲
【請求項1】
電動機の診断のための電動機振動モデルを生成する電動機振動モデル生成装置であって、
前記電動機から取得した入力電流データから複数の種類の特徴量を抽出し、前記入力電流データの取得時刻に紐付けて前処理電流データとして出力するように構成された電流データ前処理部と、
前記電動機から取得した振動データから複数の種類の特徴量を抽出し、前記振動データの取得時刻に紐付けて前処理振動データとして出力するように構成された振動データ前処理部と、
前記前処理電流データと前記前処理振動データとを同一時刻に取得されたデータとみなされるように時系列を調整して出力するように構成された時系列調整部と、
第1演算処理部と、を備え、
前記第1演算処理部は、
前記時系列調整部の出力から学習用データセットを生成することと、
前記学習用データセットを用いて前記電動機振動モデルを学習することと、
学習済み電動機振動モデルを保存することと、を実行するように構成されている
ことを特徴とする電動機振動モデル生成装置。
続きを表示(約 2,500 文字)
【請求項2】
請求項1に記載の電動機振動モデル生成装置において、
前記電動機が設置された設備から取得したプロセスデータに数値演算を実施し、前記プロセスデータの取得時刻に紐付けて前処理プロセスデータとして出力するように構成されたプロセスデータ前処理部をさらに備え、
前記時系列調整部は、前記前処理プロセスデータを前記前処理電流データ及び前記前処理振動データと同一時刻に取得されたデータとみなされるように時系列を調整して出力するように構成されている
ことを特徴とする電動機振動モデル生成装置。
【請求項3】
請求項2に記載の電動機振動モデル生成装置において、
前記電動機振動モデルはスパースモデルであって、
前記第1演算処理部は、
前記学習済み電動機振動モデルのモデル式を評価することと、
評価に基づき判定された重要度の低い入力変数を次回学習から除外することと、を実行するように構成されている
ことを特徴とする電動機振動モデル生成装置。
【請求項4】
請求項2に記載の電動機振動モデル生成装置において、
前記電動機振動モデルはスパースモデルであって、
前記第1演算処理部は、
前記学習済み電動機振動モデルのモデル式を評価することと、
評価に基づき判定された重要度の高い入力変数についてオペレータに注意を促すことと、を実行するように構成されている
ことを特徴とする電動機振動モデル生成装置。
【請求項5】
電動機を診断する電動機診断システムであって、
請求項1に記載の電動機振動モデル生成装置で生成された前記学習済み電動機振動モデルを記憶する記憶部と、
請求項1に記載の電動機振動モデル生成装置の前記電流データ前処理部と、
請求項1に記載の電動機振動モデル生成装置の前記振動データ前処理部と、
請求項1に記載の電動機振動モデル生成装置の前記時系列調整部と、
前記電動機のリアルタイムの入力電流を測定する電流センサと、
前記電動機の診断時に前記電流センサで測定された入力電力を前記電流データ前処理部のリアルタイム電流データとして扱えるように、前記入力電力をリアルタイム電流測定時刻に紐付ける電流データ入力部と、
前記電動機のリアルタイムの振動を測定する振動センサと、
前記電動機の診断時に前記振動センサで測定された振動を前記振動データ前処理部のリアルタイム振動データとして扱えるように、前記振動をリアルタイム振動測定時刻に紐付ける振動データ入力部と、
前記リアルタイム電流データに基づき前記電流データ前処理部で処理され前記リアルタイム電流測定時刻に紐付けられたリアルタイム前処理電流データと、前記リアルタイム振動データに基づき前記振動データ前処理部で処理され前記リアルタイム振動測定時刻に紐付けられたリアルタイム前処理振動データとを前記時系列調整部に入力し、前記リアルタイム前処理電流データと前記リアルタイム前処理振動データとを同一時刻に取得されたデータとみなされるように時系列を調整された第2時刻処理電流データと第2時刻加工処理振動データとに変換し、前記第2時刻処理電流データと前記第2時刻加工処理振動データとを前記学習済み電動機振動モデルに入力することによってリアルタイムデータを取得した時刻以降の前記電動機の振動状態を予測する第2演算処理部と、
予測された前記電動機の振動状態に基づいて前記電動機の異常を検知する判定部と、を備える
ことを特徴とする電動機診断システム。
【請求項6】
診断対象の電動機の入力電流データから複数の種類の特徴量を抽出して前記入力電流データの取得時刻に紐付けすることによって前処理電流データを生成し、前記電動機から取得した振動データから複数の種類の特徴量を抽出し前記振動データの取得時刻に紐付けすることによって前処理振動データを生成する第1ステップと、
前記前処理電流データと前記前処理振動データとを同じ第1時刻に取得されたデータとみなされるように時系列を調整して第1時刻加工処理電流データと第1時刻加工処理振動データとに変換する第2ステップと、
前記第1時刻と前記第1時刻加工処理電流データと前記第1時刻加工処理振動データとを学習用データセットとして電動機振動モデルを学習する第3ステップと、
前記電動機振動モデルの検証を実施する第4ステップと、
前記第4ステップでの検証結果が所定の精度を満たさない場合に前記第1ステップに戻る第5ステップと、
前記検証結果が所定の精度以内である場合、前記電動機のリアルタイムの入力電流の測定値をリアルタイム電流データとして扱えるように、前記入力電流の測定値をリアルタイム電流測定時刻に紐付けてリアルタイム前処理電流データを生成し、前記電動機のリアルタイムの振動の測定値をリアルタイム振動データとして扱えるように、前記振動の測定値をリアルタイム振動測定時刻に紐付けてリアルタイム前処理振動データを生成し、前記リアルタイム前処理電流データと前記リアルタイム前処理振動データとを同じ第2時刻に取得されたデータとみなされるように時系列を調整して第2時刻加工処理電流データと第2時刻加工処理振動データに変換する第6ステップと、
前記第2時刻加工処理電流データと前記第2時刻加工処理振動データを学習済み電動機振動モデルに入力することによって前記第2時刻以降の前記電動機の振動状態を予測する第7ステップと、
前記電動機の予測された振動が所定の閾値を超えない場合に前記第6ステップに戻る第8ステップと、
前記予測された振動が前記所定の閾値を超えた場合に異常時に対応する所定の処理を実行する第9ステップと、をコンピュータに実行させるように構成されている
ことを特徴とする電動機診断プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動機の異常を検知するための技術に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
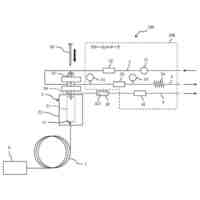
プラントに設けられた電動機が突発的に停止した場合、製造プロセスにおいて多大な損害が出てしまう。そのため、電動機が故障で停止する前、すなわち、電動機が稼働している状態で電動機の異常を検知することが要求されている。
【0003】
電動機の異常を検知するにあたっては、電動機の電流データに対してFFT分析を行い、特定周波数でのスペクトル強度がある閾値を超えた場合に異常と判定する手法が知られている。この方法によれば、電流データに特徴的な波形が出てきた場合、その特徴的な波形を異常として検知することが可能である。また、電流データをベクトル演算し、電流ベクトルから抽出した特徴量によって電動機の異常を判定する手法も知られている。電動機の異常を検知する従来技術が開示された文献としては、例えば、特許文献1及び特許文献2を挙げることができる。
【0004】
上記のように、電動機の異常の検知に関しては、以前から様々な技術が提案されている。しかしながら、電動機の故障が製造プロセスに与える影響は多大であることから、故障の発生前に電動機の異常を検知する精度については更なる改善が求められている。
【先行技術文献】
【特許文献】
【0005】
国際公開2019/102545号
特開2020-114084号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は、上記の課題に鑑みてなされたものである。本開示の1つの目的は、電動機の異常を予測検知する精度を向上させることにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本開示は電動機の診断のための電動機振動モデルを生成する電動機振動モデル生成装置を提供する。本開示の電動機振動モデル生成装置は、
上記電動機から取得した入力電流データから複数の種類の特徴量を抽出し、上記入力電流データの取得時刻に紐付けて前処理電流データとして出力するように構成された電流データ前処理部と、
上記電動機から取得した振動データから複数の種類の特徴量を抽出し、上記振動データの取得時刻に紐付けて前処理振動データとして出力するように構成された振動データ前処理部と、
上記前処理電流データと上記前処理振動データとを同一時刻に取得されたデータとみなされるように時系列を調整して出力するように構成された時系列調整部と、
第1演算処理部と、を備え、
上記第1演算処理部は、
上記時系列調整部の出力から学習用データセットを生成することと、
上記学習用データセットを用いて上記電動機振動モデルを学習することと、
学習済み電動機振動モデルを保存することと、を実行するように構成されている
ことを特徴としている。
【0008】
また、上記目的を達成するため、本開示は電動機を診断する電動機診断システムを提供する。本開示の電動機診断システムは、
上記電動機振動モデル生成装置で生成された上記学習済み電動機振動モデルを記憶する記憶部と、
本開示の電動機振動モデル生成装置の上記電流データ前処理部と、
本開示の電動機振動モデル生成装置の上記振動データ前処理部と、
本開示の電動機振動モデル生成装置の上記時系列調整部と、
上記電動機のリアルタイムの入力電流を測定する電流センサと、
上記電動機の診断時に上記電流センサで測定された入力電力を上記電流データ前処理部のリアルタイム電流データとして扱えるように、上記入力電力をリアルタイム電流測定時刻に紐付ける電流データ入力部と、
上記電動機のリアルタイムの振動を測定する振動センサと、
上記電動機の診断時に上記振動センサで測定された振動を上記振動データ前処理部のリアルタイム振動データとして扱えるように、上記振動をリアルタイム振動測定時刻に紐付ける振動データ入力部と、
上記リアルタイム電流データに基づき上記電流データ前処理部で処理され上記リアルタイム電流測定時刻に紐付けられたリアルタイム前処理電流データと、上記リアルタイム振動データに基づき上記振動データ前処理部で処理され上記リアルタイム振動測定時刻に紐付けられたリアルタイム前処理振動データとを上記時系列調整部に入力し、上記リアルタイム前処理電流データと上記リアルタイム前処理振動データとを同一時刻に取得されたデータとみなされるように時系列を調整された第2時刻処理電流データと第2時刻加工処理振動データとに変換し、上記第2時刻処理電流データと上記第2時刻加工処理振動データとを上記学習済み電動機振動モデルに入力することによってリアルタイムデータを取得した時刻以降の上記電動機の振動状態を予測する第2演算処理部と、
予測された上記電動機の振動状態に基づいて上記電動機の異常を検知する判定部と、を備える
ことを特徴としている。
【0009】
また、上記目的を達成するため、本開示は電動機を診断する電動機診断プログラムを提供する。本開示の電動機診断プログラムは、
診断対象の電動機の入力電流データから複数の種類の特徴量を抽出して上記入力電流データの取得時刻に紐付けすることによって前処理電流データを生成し、上記電動機から取得した振動データから複数の種類の特徴量を抽出し上記振動データの取得時刻に紐付けすることによって前処理振動データを生成する第1ステップと、
上記前処理電流データと上記前処理振動データとを同じ第1時刻に取得されたデータとみなされるように時系列を調整して第1時刻加工処理電流データと第1時刻加工処理振動データとに変換する第2ステップと、
上記第1時刻と上記第1時刻加工処理電流データと上記第1時刻加工処理振動データとを学習用データセットとして電動機振動モデルを学習する第3ステップと、
上記電動機振動モデルの検証を実施する第4ステップと、
上記第4ステップでの検証結果が所定の精度を満たさない場合に上記第1ステップに戻る第5ステップと、
上記検証結果が所定の精度以内である場合、上記電動機のリアルタイムの入力電流の測定値をリアルタイム電流データとして扱えるように、上記入力電流の測定値をリアルタイム電流測定時刻に紐付けてリアルタイム前処理電流データを生成し、上記電動機のリアルタイムの振動の測定値をリアルタイム振動データとして扱えるように、上記振動の測定値をリアルタイム振動測定時刻に紐付けてリアルタイム前処理振動データを生成し、上記リアルタイム前処理電流データと上記リアルタイム前処理振動データとを同じ第2時刻に取得されたデータとみなされるように時系列を調整して第2時刻加工処理電流データと第2時刻加工処理電振動データに変換する第6ステップと、
上記第2時刻加工処理電流データと上記第2時刻加工処理振動データを上記学習済み電動機振動モデルに入力することによって上記第2時刻以降の上記電動機の振動状態を予測する第7ステップと、
上記電動機の予測された振動が所定の閾値を超えない場合に上記第6ステップに戻る第8ステップと、
上記予測された振動が上記所定の閾値を超えた場合に異常時に対応する所定の処理を実行する第9ステップと、をコンピュータに実行させるように構成されている
ことを特徴としている。
【発明の効果】
【0010】
電動機の異常が反映される電動機の振動は電流との間に密接な関係を有している。その関係は電動機毎に異なり、また、同一の電動機であっても時間によって変化する。本開示の電動機振動モデル生成装置によれば、電流データの特徴量と振動データとの関係が学習された電動機振動モデルを生成することができる。そして、本開示の電動機診断システムによれば、学習された電動機振動モデルを用いることによってリアルタイム電流データ等から振動状態を推定し、推定した振動状態に基づいて電動機の異常を精度よく予測検知することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
集束超音波の測定機
18日前
個人
センサ制御回路
18日前
株式会社大真空
センサ
6日前
甲神電機株式会社
漏電検出器
11日前
甲神電機株式会社
電流センサ
11日前
甲神電機株式会社
電流検出器
11日前
株式会社大真空
センサ
22日前
ユニパルス株式会社
ロードセル
5日前
株式会社高橋型精
採尿具
12日前
ダイトロン株式会社
外観検査装置
18日前
株式会社トプコン
測量装置
11日前
アズビル株式会社
熱式流量計
12日前
株式会社諸岡
自動運転作業機
22日前
アズビル株式会社
漏液センサ
22日前
学校法人東京電機大学
干渉計
19日前
株式会社ミトミ技研
圧力測定装置
18日前
シャープ株式会社
収納装置
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
豊田合成株式会社
表示装置
11日前
TDK株式会社
磁気センサ
18日前
理研計器株式会社
ガス検知器
22日前
株式会社JVCケンウッド
撮像装置
19日前
トヨタ自動車株式会社
画像検査装置
6日前
アズビル株式会社
真空計測システム
22日前
エスペック株式会社
試験装置
19日前
個人
電気計器用結線器
22日前
アズビル株式会社
ヒータ温度推定装置
19日前
株式会社東京久栄
水中移動体用採水器
12日前
TDK株式会社
温度センサ
12日前
横河電機株式会社
光源装置
12日前
株式会社大真空
センサ及びその製造方法
5日前
株式会社エー・アンド・デイ
金属検出機
22日前
株式会社島津製作所
ガスクロマトグラフ
18日前
ローム株式会社
MEMSデバイス
12日前
ローム株式会社
MEMS装置
18日前
タカハタプレシジョン株式会社
水道メータ
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ