TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018495
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122228
出願日
2023-07-27
発明の名称
制御装置、制御方法および空気調和機
出願人
三菱重工サーマルシステムズ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H02P
27/06 20060101AFI20250130BHJP(電力の発電,変換,配電)
要約
【課題】パターンを適切に選択することができる制御装置、制御方法および空気調和機を提供する。
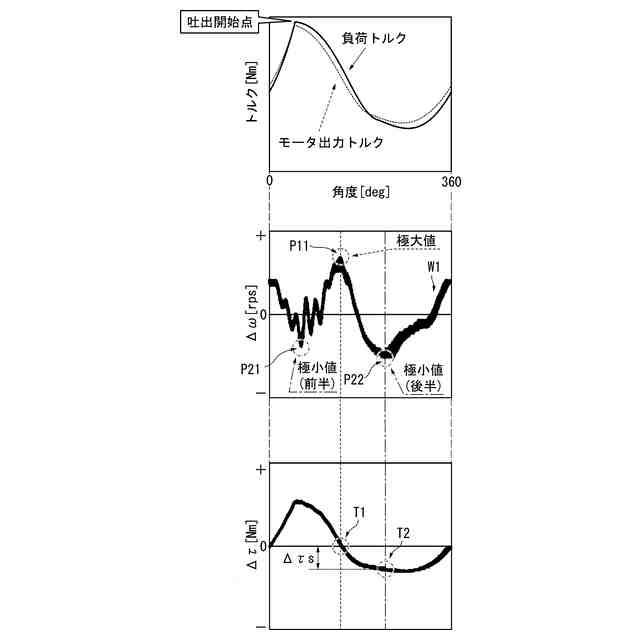
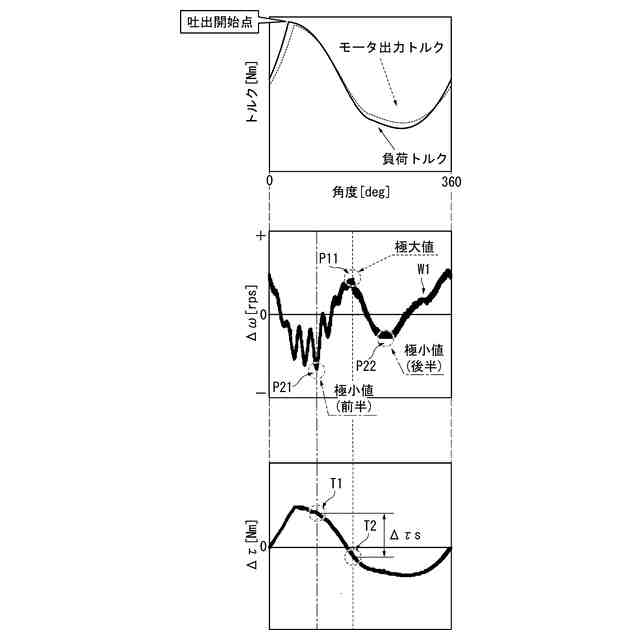
【解決手段】制御装置は、圧縮機を回転駆動するモータを交流駆動するインバータを制御することでモータの回転数を制御する制御装置であって、モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正したトルク指令値に基づいてインバータを制御する際に、圧縮機の1回転中に偏差の波形が含む第1の極性の1個の極値と第1の極性と異なる第2の極性の2個の極値とを認識し、複数の極値が発生した各タイミングで得られたモータの制御で用いる情報に基づいて、複数のパターンのいずれかを選択する。
【選択図】図5
特許請求の範囲
【請求項1】
圧縮機を回転駆動するモータを交流駆動するインバータを制御することで前記モータの回転数を制御する制御装置であって、
前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、
前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する
制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第2の極性の2個の極値が発生した各タイミングで得られた各前記偏差の大小の比較結果を、前記情報として、前記複数のパターンのいずれかを選択する
請求項1に記載の制御装置。
【請求項3】
前記第1の極性の極値が発生したタイミングで得られた前記補正した前記トルク指令値と前記トルク指令値の平均値との差と、
前記第2の極性の2個の極値のうち絶対値が大きい極値が発生したタイミングで得られた前記補正した前記トルク指令値と前記トルク指令値の平均値との差と、
の差分を、前記情報として、前記複数のパターンのいずれかを選択する
請求項2に記載の制御装置。
【請求項4】
前記複数のパターンは前記圧縮機の異なる複数の圧力比にそれぞれ対応し、
前記複数のパターンのいずれかの選択は前記圧力比を増加または減少させる方向で前記圧力比の大きさの順に行われ、
前記比較結果による選択の前記方向と、前記差分による選択の前記方向とが一致した場合に次の前記パターンを選択する
請求項3に記載の制御装置。
【請求項5】
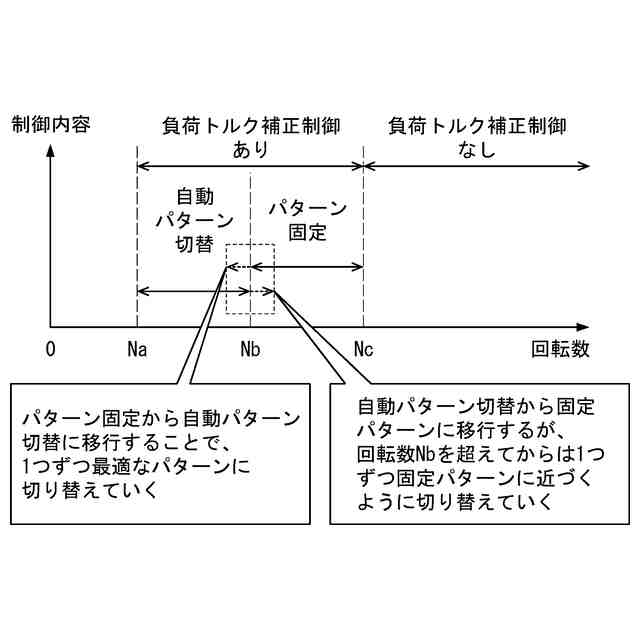
前記情報に基づいて前記複数のパターンのいずれかを適宜選択し、選択した前記パターンに基づいて前記トルク指令値を補正して、補正した前記トルク指令値に基づいて前記インバータを制御する動作状態と、1つの前記パターンに基づいて前記トルク指令値を補正して、補正した前記トルク指令値に基づいて前記インバータを制御する動作状態とを、前記モータの回転数に応じて切り替えて、前記モータの回転数を制御する
請求項4に記載の制御装置。
【請求項6】
前記パターンに所定の変調率を乗じた値に基づいて前記トルク指令値を補正する
請求項1から5のいずれか1項に記載の制御装置。
【請求項7】
圧縮機を回転駆動するモータを交流駆動するインバータを制御することで前記モータの回転数を制御する方法であって、
前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、
前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する
制御方法。
【請求項8】
圧縮機と、
前記圧縮機を回転駆動するモータと、
前記モータを交流駆動するインバータと、
前記インバータを制御することで前記モータの回転数を制御する制御装置であって、
前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、
前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する制御装置とを、
備える空気調和機。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法および空気調和機に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
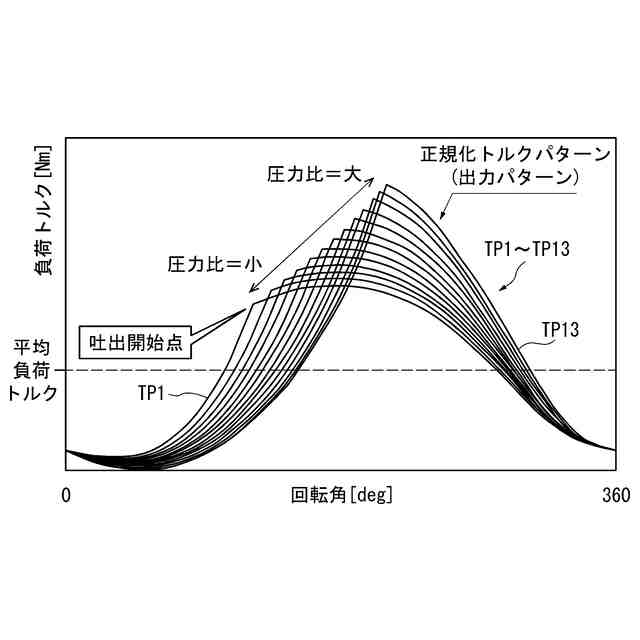
ロータリ圧縮機においては、1回転の間に吸入、圧縮、および吐出の各行程における冷媒ガス圧の変化が発生するため、定常的な負荷トルク変動が発生する。そこで、特許文献1に記載されている制御装置は、平均トルクと正規化トルクパターンとの積により、推定回転子位置に合わせて出力トルク指令を補償することで、モータの速度変動を抑えている。特許文献1に記載されている正規化トルクパターンは、例えばモータのロータの回転角度30度毎に設定された係数値のパターンであり、平均トルクと各区間の係数値との積が全区間の合計では平均トルクに一致するように、各区間の係数値が正規化されている。また、この制御装置では、正規化トルクパターンを複数用意した場合に、モータを駆動する平均負荷トルク、モータの回転数変動幅、モータ電流のピーク値、または、モータ回転数がピークとなるロータ角度に基づいて、正規化トルクパターンが選択される。
【先行技術文献】
【特許文献】
【0003】
特開2008-245506号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の制御装置によれば、上述したようにして複数の正規化トルクパターンのなかから回転状況に対応した正規化トルクパターンを選択し、選択した正規化トルクパターンを用いて推定回転子位置に合わせて出力トルク指令を補償することでモータの速度変動を抑えることができる。
【0005】
本開示は、上記技術を背景としてなされたものであり、パターンを適切に選択することができる制御装置、制御方法および空気調和機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る制御装置は、圧縮機を回転駆動するモータを交流駆動するインバータを制御することで前記モータの回転数を制御する制御装置であって、前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する。本態様および以下の各態様によれば、パターンを適切に選択することができる。
【0007】
本開示に係る制御方法は、圧縮機を回転駆動するモータを交流駆動するインバータを制御することで前記モータの回転数を制御する方法であって、前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する。
【0008】
本開示に係る空気調和機は、圧縮機と、前記圧縮機を回転駆動するモータと、前記モータを交流駆動するインバータと、前記インバータを制御することで前記モータの回転数を制御する制御装置であって、前記モータの回転数と回転数指令値との偏差に応じて算出したトルク指令値を、前記圧縮機の負荷変動に対応するための複数のパターンのいずれかに基づいて補正し、補正した前記トルク指令値に基づいて前記インバータを制御する際に、前記圧縮機の1回転中に前記偏差の波形が含む第1の極性の1個の極値と前記第1の極性と異なる第2の極性の2個の極値とを認識し、複数の前記極値が発生した各タイミングで得られた前記モータの制御で用いる情報に基づいて、前記複数のパターンのいずれかを選択する制御装置とを、備える。
【発明の効果】
【0009】
本開示の制御装置、制御方法および空気調和機によれば、パターンを適切に選択することができる。
【図面の簡単な説明】
【0010】
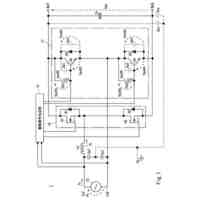
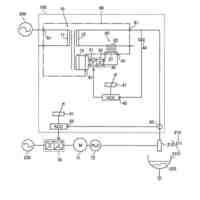
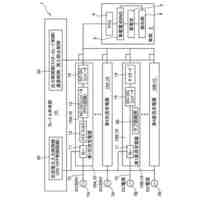
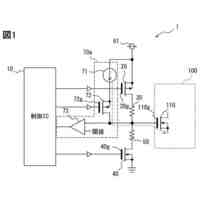
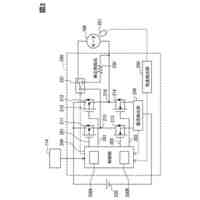
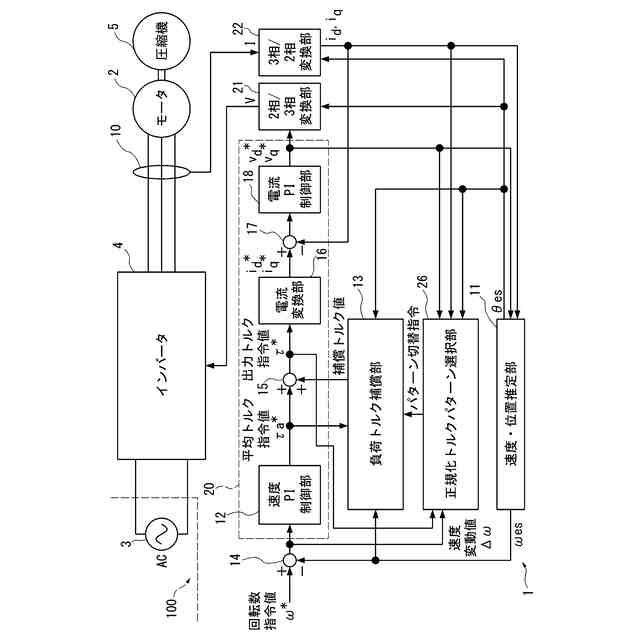
本開示の第1実施形態に係る空調回転圧縮機に接続されたモータの制御装置の構成例を示すブロック図である。
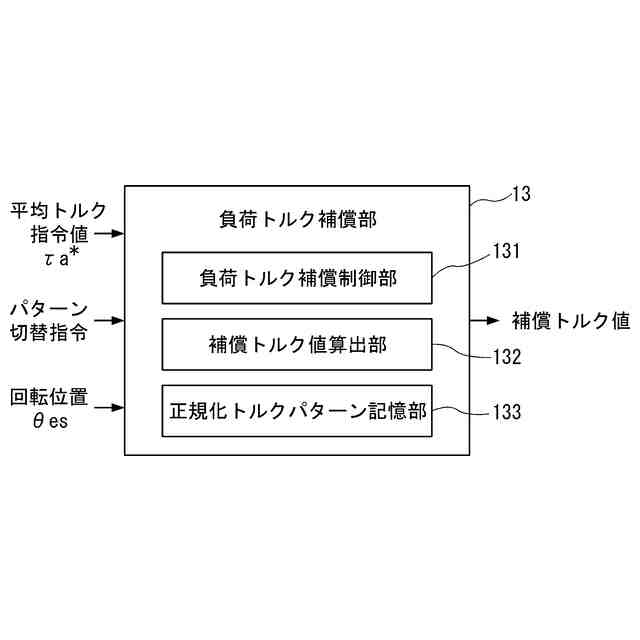
本開示の第1実施形態に係る負荷トルク補償部の構成例を示すブロック図である。
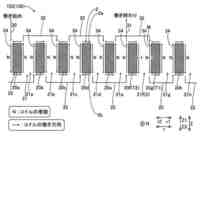
本開示の第1実施形態に係る正規化トルクパターンの例を示す模式図である。
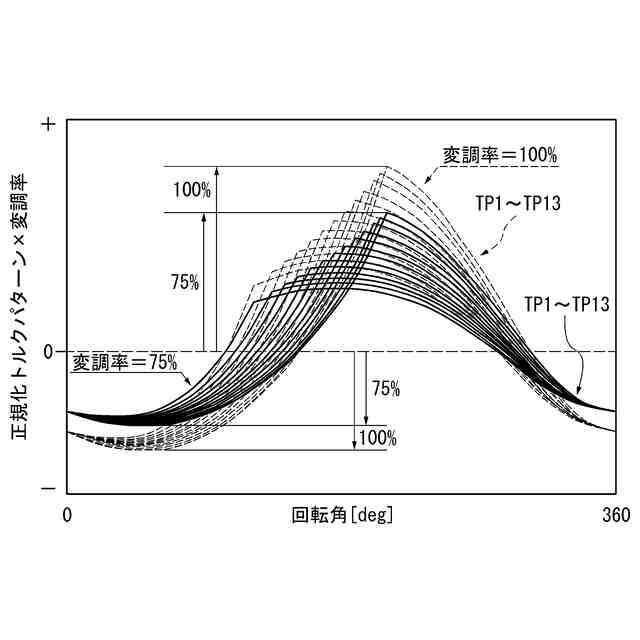
本開示の第1実施形態に係る変調率を乗じた正規化トルクパターンの例を示す模式図である。
本開示の第1実施形態に係る負荷トルク補償制御の例を示す模式図である。
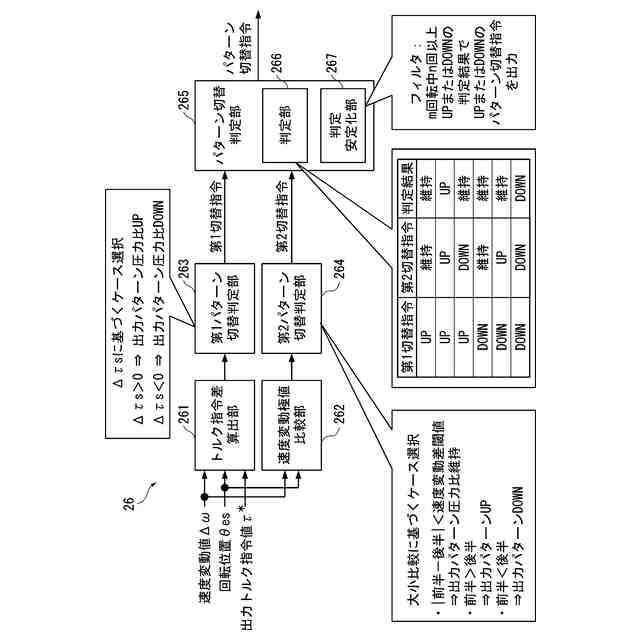
本開示の第1実施形態に係る正規化トルクパターン選択部の構成例を示すブロック図である。
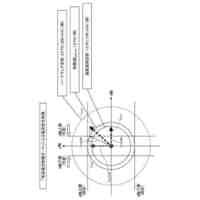
本開示の第1実施形態に係る正規化トルクパターン選択部の動作例を説明するための模式図である。
本開示の第1実施形態に係る正規化トルクパターン選択部の動作例を説明するための模式図である。
本開示の第1実施形態に係る正規化トルクパターン選択部の動作例を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第1実施形態に係るトルク補償を説明するための模式図である。
本開示の第2実施形態に係るパターン切替判定部の構成例を示すブロック図である。
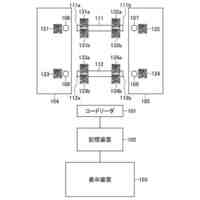
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
静電モータ
19日前
株式会社ExH
接触ユニット
23日前
株式会社東光高岳
開閉装置
12日前
株式会社アイシン
車両用駆動装置
19日前
竹内工業株式会社
配線ダクト
13日前
トヨタ自動車株式会社
積層コア
19日前
日産自動車株式会社
ロータ
19日前
株式会社高砂製作所
力率改善回路
23日前
株式会社豊田自動織機
回転電機のロータ
26日前
住友ベークライト株式会社
ロータ
6日前
富士電機株式会社
電源装置
6日前
株式会社豊田自動織機
回転電機のロータ
19日前
日産自動車株式会社
ロータ
13日前
アズビル株式会社
配線確認システム
19日前
住友電装株式会社
電気接続箱
23日前
スワン電器株式会社
電源装置
6日前
株式会社アイシン
巻線界磁型回転電機
6日前
富士電機株式会社
電力変換装置
26日前
富士電機株式会社
電力変換装置
6日前
株式会社ダイヘン
電圧調整装置
6日前
東洋電装株式会社
駆動制御装置
6日前
本田技研工業株式会社
回転電機
26日前
ダイハツ工業株式会社
クレードル装置
26日前
トヨタ自動車株式会社
電動車両
19日前
本田技研工業株式会社
回転電機
23日前
富士電機株式会社
電力変換装置
13日前
株式会社ダイヘン
電力システム
23日前
株式会社ダイヘン
電力システム
23日前
株式会社豊田自動織機
回転電機
23日前
株式会社ミツバ
電動モータ
13日前
株式会社デンソー
駆動回路
23日前
株式会社日立製作所
回転電機
19日前
株式会社日立製作所
回転電機
7日前
個人
電力管理装置及び電力管理システム
20日前
株式会社豊田自動織機
電動圧縮機
19日前
株式会社デンソートリム
モータ制御装置
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ