TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016017
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119012
出願日
2023-07-21
発明の名称
相対位置及び相対姿勢計測装置、相対位置及び相対姿勢調整装置及びアンテナ方向調整システム
出願人
国立研究開発法人情報通信研究機構
代理人
個人
主分類
G01S
5/14 20060101AFI20250124BHJP(測定;試験)
要約
【課題】移動体と固定局、又は移動体同士のアンテナのアライメントをとる場合においても、生じる角度や位置ずれを、よりリアルタイム性高く検出すること。
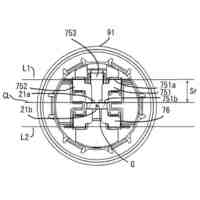
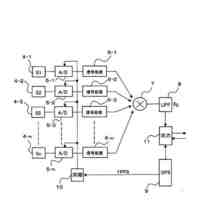
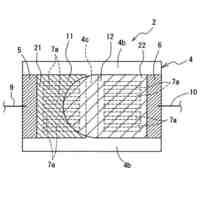
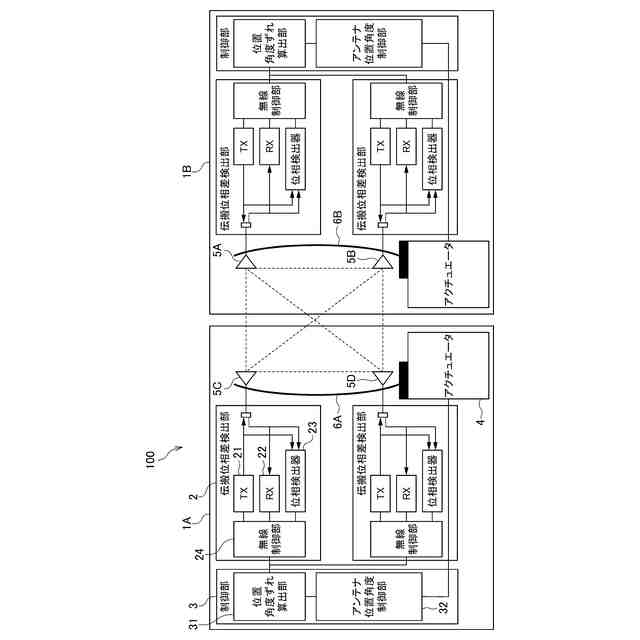
【解決手段】相対位置及び相対姿勢計測装置は、位相差検出用アンテナと、前記位相差検出用アンテナを介して電波を送信するトランスミッタと、前記位相差検出用アンテナを介して電波を受信するレシーバと、を有する二つ以上の伝搬位相差検出部と、送信された電波の送信時搬送波位相と他の1以上の伝搬位相差検出部から送信された電波のそれぞれの受信時搬送波位相とに基づいて、位相差をそれぞれ検出する位相検出部と、位相差に基づいて、前記伝搬位相差検出アンテナが設けられた被測定対象物の位置又は方向を算出する位置角度ずれ算出部とを備えることを特徴とする。
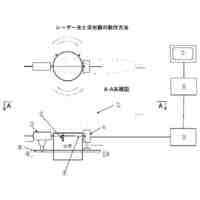
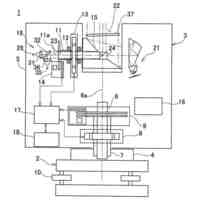
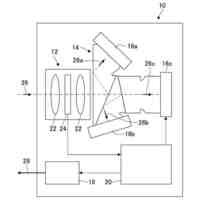
【選択図】図1
特許請求の範囲
【請求項1】
位相差検出用アンテナと、前記位相差検出用アンテナを介して電波を送信するトランスミッタと、前記位相差検出用アンテナを介して電波を受信するレシーバと、を有する2つ以上の伝搬位相差検出部と、
前記トランスミッタにより送信された電波の送信時搬送波位相と他の1つ以上の伝搬位相差検出部から送信されると共に前記レシーバにより受信された電波のそれぞれの受信時搬送波位相とに基づいて、前記送信時搬送波位相と前記受信時搬送波位相との位相差をそれぞれ検出する位相検出部と、
前記位相検出部により検出されたそれぞれの位相差に基づいて、前記伝搬位相差検出アンテナが設けられた被測定対象物の位置又は方向を算出する位置角度ずれ算出部とを備えること
を特徴とする相対位置及び相対姿勢計測装置。
続きを表示(約 1,600 文字)
【請求項2】
前記位相検出部は、それぞれの前記位相差を繰り返し検出し、それぞれの前記位相差の時間的な変化値を検出し、
前記位置角度ずれ算出部は、前記位相検出部により検出されたそれぞれの変化値に基づいて、前記被測定対象物の位置又は方向の変化値を算出すること
を特徴とする請求項1に記載の相対位置及び相対姿勢計測装置。
【請求項3】
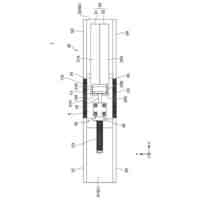
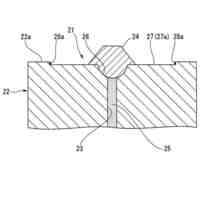
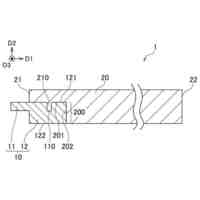
前記被測定対象物を固定又は支持すると共に前記被測定対象物に取り付けられた位相差検出用アンテナと他の位相差検出用アンテナとの間の距離を大きくする変位拡大機構が設けられること
を特徴とする請求項1記載の相対位置及び相対姿勢計測装置。
【請求項4】
前記伝搬位相差検出部は、送信する電波の周波数が2種類以上切り替え可能なトランスミッタ又は、送信する電波の周波数が離散的又は連続的に可変可能な前記トランスミッタの何れかを有すること
を特徴とする請求項1に記載の相対位置及び相対姿勢計測装置。
【請求項5】
前記被測定対象物の位置又は方向に関する物理情報を計測するセンサをさらに備え、
前記位置角度ずれ算出部は、前記位相差と、前記センサにより計測された物理情報とに基づいて、前記位置又は前記方向を算出すること
を特徴とする請求項1に記載の相対位置及び相対姿勢計測装置。
【請求項6】
請求項1に記載された相対位置及び相対姿勢計測装置を用いた相対位置及び相対姿勢調整装置であって、
前記被測定対象物の位置又は方向を調整するアクチュエータと、
前記位置角度ずれ算出部が算出した位置又は方向に基づいて、予め設定された特定の位置又は方向に近づくように前記アクチュエータを制御する位置角度制御部とをさらに備えること
を特徴とする相対位置及び相対姿勢調整装置。
【請求項7】
前記位置角度ずれ算出部は、前記位相検出部により検出されたそれぞれの位相差を同一にする誤差信号を出力し、
前記位置角度制御部は、前記位置角度ずれ算出部により出力された誤差信号に基づいて、前記アクチュエータを制御すること
を特徴とする請求項6に記載の相対位置及び相対姿勢調整装置。
【請求項8】
前記位相検出部は、それぞれの前記位相差を繰り返し検出し、それぞれの前記位相差の時間的な変化値を検出し、
前記位置角度ずれ算出部は、前記位相検出部により検出されたそれぞれの位相差の時間的な変化値を基準値にする誤差信号を出力し、
前記位置角度制御部は、前記位置角度ずれ算出部により出力された誤差信号に基づいて、前記アクチュエータを制御すること
を特徴とする請求項6に記載の相対位置及び相対姿勢調整装置。
【請求項9】
請求項1に記載された相対位置及び相対姿勢計測装置を複数用いた相対位置及び相対姿勢調整システムであって、
前記被測定対象物の方向を制御するアクチュエータと、
前記位置角度ずれ算出部により算出された位置又は方向に基づいて、前記2以上の被測定対象物が予め設定された動作をするように前記アクチュエータを制御する位置角度制御部とを備えること
を特徴とする相対位置及び相対姿勢調整システム。
【請求項10】
請求項1に記載された相対位置及び相対姿勢計測装置を用いたアンテナ方向調整システムであって、
前記被測定対象物である二つ以上のアンテナと、
前記アンテナの方向を制御するアクチュエータと、
前記位置角度ずれ算出部により算出された位置又は方向に基づいて、前記2以上のアンテナが対向するように前記アクチュエータを制御する位置角度制御部とを備えること
を特徴とするアンテナ方向調整システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、二物体間の位相差を複数経路にわたって計測することによって、理想的な位置からのずれ、及び理想的な角度からのずれを計測することができる相対位置及び相対姿勢計測装置、相対位置及び相対姿勢調整装置及びアンテナ方向調整システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、28GHz~300GHz、及びそれを超える周波数であるミリ波・テラヘルツ波を用いた広帯域通信により、高速・大容量なデータ転送を行うことが可能となった。これは、使用周波数帯が上がるにつれて広帯域となり転送レートを向上させることが可能となったからであった。
【0003】
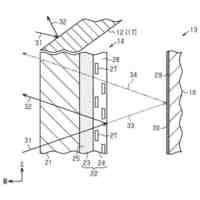
一方で、広帯域通信により、電波の減衰が強くなるため、伝搬距離がとれなくなった。このため、例えばホーンアンテナやパラボラアンテナ等の開口面アンテナを高ゲインアンテナとして用いて、この減衰を補うことが一般的に行われている。これにより、電波自体の直線性に伴い強い指向性をもったビーム状の電波を扱う必要性が生じた。このような高ゲインアンテナは、送受両側で極めて精密に対向させないと、ゲインアンテナ間の位置・角度ずれによって電波の受信強度が減少し、通信品質に影響を与えてしまうことが懸念されていた。
【0004】
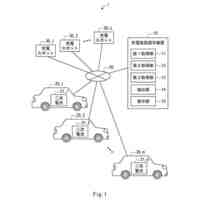
また、移動体と固定局、あるいは移動体同士のアンテナのアライメントをとる場合においては、生じる角度や位置ずれに対して、よりリアルタイム性高くフィードバック制御する必要があった。このため、特許文献1~3に開示されている制御技術が必要とされていた。
【0005】
特許文献1には、ミリ波等の直線性の高い周波数帯域を扱うアンテナにおいて、その通信用電波自体の受信電波強度(RSSI:Received Signal Strength Indicator)を観察し、その強度が最大になるようにアンテナの向きを最適化する無線装置が開示されている。また、特許文献2には、送信側および受信側のいずれか、あるいは両方にGPS測位装置を設置し、それぞれの測位情報にもとづいて理想的な対向角度を算出し、それに合わせてアンテナの向きを最適化する基地局装置が開示されている。さらに、特許文献3には、GPSを使ったリアルタイムキネマティック測位を用い、またジャイロ等の姿勢センサを併用することによって50GHz帯のアンテナの向きを合わせるアンテナ方向調整システムが開示されている。また、特許文献3では、地上のアンテナから上空を飛行する航空機に対して通信を可能とするアンテナ方向調整システムも開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2004-112554号公報
特開2017-50599号公報
特開2012-220318号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1及び特許文献2に開示されている技術では、静止物に搭載されたアンテナを対象としたアンテナの方向調整を前提としており、移動体同士のアンテナのアライメントをとることを想定していない。このため、特許文献1及び特許文献2に開示されている技術では、移動体同士のアンテナのアライメントを高精度にとることができない問題点があった。
【0008】
また、特許文献3では、指向性のある送信電波の方向を走査して受信したタイミングから方向を決定するが、比較的精度が低いという問題点があった。
【0009】
また、現在でも一般的にはターゲットスコープを用いた目視、又はRSSI等を使った手動調整が使われているが、作業者の負担が大きく、精度の高い対向状態を実現することは困難であった。
【0010】
また、RSSIを用いたアンテナアライメントは、ミリ波やテラヘルツ波の非常に絞られたビームでは、そもそもわずかな角度ずれだけでRSSIが検出できないほどにビームのずれが生じる可能性があった。例えば、0.1度の角度ずれであっても、100m先では17cmの位置ずれに相当する。このとき、絞られたビームが数cmであればアンテナでRSSIが検出できず、位置調整に利用できないという問題点があった。また、RSSIを用いたアンテナアライメントでは、最適な対向位置又は角度にあるときにRSSIがいくつになるかは厳密には分からないため、アンテナの向きを調整しながら最大値を探すことになる。これにより応答性が悪く、よりリアルタイム性高くフィードバック制御する必要が発生する移動体のアライメント合わせには向かないという問題点があった。また、RSSIを用いたアンテナアライメントでは、最大値探索となるために、サイドローブ周辺等での局所最適解に落ち着くことが懸念され、メインローブを捉えられずに最良の通信品質を提供できない場合があるという問題点があった。特に、移動体の場合では、位置3軸、角度3軸の合計6自由度の調整が必要となり、スカラー量であるRSSIから調整するには多くの試行が必要であるため、応答性が犠牲になるとともに実現が難しいという問題点があった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
集束超音波の測定機
17日前
個人
センサ制御回路
17日前
甲神電機株式会社
電流センサ
10日前
株式会社大真空
センサ
5日前
甲神電機株式会社
漏電検出器
10日前
甲神電機株式会社
電流検出器
10日前
株式会社高橋型精
採尿具
11日前
ユニパルス株式会社
ロードセル
4日前
株式会社トプコン
測量装置
10日前
ダイトロン株式会社
外観検査装置
17日前
学校法人東京電機大学
干渉計
18日前
アズビル株式会社
熱式流量計
11日前
シャープ株式会社
収納装置
11日前
日本特殊陶業株式会社
ガスセンサ
11日前
TDK株式会社
磁気センサ
17日前
株式会社ミトミ技研
圧力測定装置
17日前
豊田合成株式会社
表示装置
10日前
株式会社JVCケンウッド
撮像装置
18日前
エスペック株式会社
試験装置
18日前
トヨタ自動車株式会社
画像検査装置
5日前
アズビル株式会社
ヒータ温度推定装置
18日前
株式会社東京久栄
水中移動体用採水器
11日前
ローム株式会社
MEMSデバイス
11日前
株式会社島津製作所
ガスクロマトグラフ
17日前
株式会社大真空
センサ及びその製造方法
4日前
TDK株式会社
温度センサ
11日前
横河電機株式会社
光源装置
11日前
株式会社テクノメデイカ
採血分注システム
10日前
公立大学法人大阪
蛍光X線分析装置
5日前
ローム株式会社
MEMS装置
17日前
東ソー株式会社
D-サイロキシン特異的測定方法
17日前
タカハタプレシジョン株式会社
水道メータ
17日前
アズビル株式会社
封止方法および封止部構造
17日前
株式会社日本マイクロニクス
プローブ
4日前
トヨタ自動車株式会社
充電施設提示システム
4日前
トヨタ自動車株式会社
走行経路提示システム
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ